

- 6.59 MB
- 2021-03-02 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
道路交通流理论
1
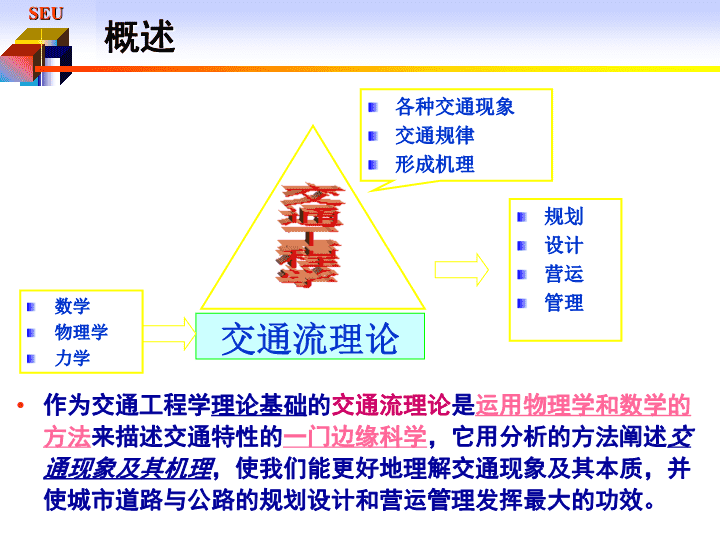
交通工程学
交通流理论
数学
物理学
力学
规划
设计
营运
管理
各种交通现象
交通规律
形成机理
作为交通工程学
理论基础
的
交通流理论
是
运用物理学和数学的方法
来描述交通特性的
一门边缘科学
,它用分析的方法阐述
交通现象及其机理
,使我们能更好地理解交通现象及其本质,并使城市道路与公路的规划设计和营运管理发挥最大的功效。
概述
20
世纪
30
年代
才开始发展,最早采用的是概率论方法。
1933
年,金蔡
(Kinzer.J.P)
论述了泊松分布应用于交通分析的可能性;
1936
年,亚当斯
(Adams.W.F)
发表了数值例题;格林希尔茨(
Greenshields
)发表了用概率论和数理统计的方法建立的数学模型,用以描述交通流量和速度的关系。
40
年代
,由于二战的影响,交通流理论的发展不多。
50
年代
,随着汽车工业和交通运输业的迅速发展,交通量、交通事故和交通阻塞的骤增, 交通流中车辆的
独立性
越来越小,采用的概率论方法越来越难以适应,迫使理论研究者寻求新的模型,于是相继出现了跟驰(
Car Following
)理论、交通波(
Traffic Wave Theory
)理论(流体动力学模拟)和车辆排队理论(
Queuing Theory
)。这一时期的代表人物有
Wardrop
、
Reuschel
、
Pipes
、
Lighthill
、
Whitham
、
Newel
、
Webster
、
Edie
、
Foote
、
Herman
、
Chandler
等。
交通流理论的发展历程
1959
年
12
月
,交通工程学
应用数学
方面学者
100
多人在底特律举行首届
交通流理论国际研讨会
,并确定每三年召开一次。从此,交通流理论的研究进入了一个迅速发展的时期。
1975
年
丹尼尔
(Daniel I.G)
和马休
(marthow
,
J.H)
汇集了各方面的研究成果,出版了
《
交通流理论
》
一书,较全面、系统地阐述了交通流理论的内容及其发展。
1990
年
美国
Adolf D
.
May
出版了
《Traffic Flow Fundamentals》
1996
年
,美国联邦公路局(
The Federal Highway Administration
,
FHWA
)出版了
《Monograph on Traffic Flow Theory》
。主编
Nathan H
.
Gartner
,
Carroll Messer
,
Ajay K
.
Rathi
等。涉及的内容包括:
交通流特性、人的因素、车辆跟驰模型、连续流模型、宏观交通流模型、交通影响模型、无信号交叉口理论、信号交叉口交通流理论、交通模拟和交通分配。
交通流理论的发展历程
从交通工程(汽车)诞生
——
第二次世界大战结束
汽车工业发展
交通量迅速增长
城市道路建设
交通事故上升
创始阶段
研究背景
交通工程学刚刚诞生,需要建立交通工程学的基本理论体系,探索道路交通的基本规律
代表性人物
格林希尔茨(
Bruce D. Greenshields
)
研究手段
大量现场调查与观测
利用概率论与数理统计,建立模型
代表性成果
交通流与速度的关系模型
快速发展阶段
第二次世界大战结束
——20
世纪
50
年代末
汽车数量猛增
交通规划
道路建设加快
交通控制
战后经济恢复期
(50
年代
)
,为了解决就业问题,通过道路建设带动汽车
.
建材
.
钢铁
.
石油
.
玻璃等行业的发展
研究背景
汽车拥有量大幅度增加,交通规划、交通控制开始发展,需要交通流理论进行支撑
代表性人物
沃尔卓普(
Wardrop
)
韦伯斯特(
Webster
)等一批学者
研究手段
大量现场调查与观测
运筹学、物理学模型
代表性成果
车辆跟弛理论
交通波动理论
随机排队理论等
稳定发展阶段
20
世纪
50
年代末
——
交通拥挤
交通问题
交通事故
交通污染
代表性成果
交通产生理论
——
交通需求分析
交通流特征
交通供给理论
交通平衡理论
——
路网交通流调度(分配)
交通模拟理论
——
计算机模拟再现、辅助决策
研究背景
汽车普及,交通问题日趋严重,希望缓解城市交通拥
挤问题
代表性人物
梅(
May
)、赫尔曼(
Herman
)纽威尔(
Newell)
等
研究手段
调查与观测
网络理论、人工智能理论(神经网络、元胞自动机)、计算机仿真(管理学、物理学、数学)
——
道路通行能力
背景
定义
交通流理论:研究在一定环境下交通流随时间和空间变化规律的模型和方法体系。
Traffic flow theory: The description of traffic behavior by application of the laws of physics and mathematics.
空间
时间
点(段)
路段
路网
短时间
微观
中观
宏观
较长时间
中观
中观
宏观
长时间
宏观
宏观
宏观
研究内容
交通流模型(
Traffic Flow
Model
):
(驾驶)人员的因素模型
(
Human Factors
)
车辆跟驰模型
(
Car Following
)
连续流模型
(
Continuous Flow
)
无信号控制交叉口模型
(
Unsignalized Intersection
)
信号控制交叉口模型
(
Signalized Intersection
)
宏观交通流模型
(
Macroscopic Flow
)
交通影响模型
(
Traffic Impact
)
道路通行能力
(
Highway Capacity
)
研究内容
交通流特性
(
Traffic Flow Characteristics
)
指交通流运行状态的定性和定量特征。
交通流参数 (
用来描述和反映交通流特性的物理量)
车头时距
(
Time
H
eadway
)
流量
(
Traffic F
low
Rate
、
Traffic Volume
)
速度
(
S
peed
)
密度
(
D
ensity
)
车头间距
(
D
istance
H
eadway
)
车道占有率
(
O
ccupancy
)
交通流参数
1
、车头时距(
Time Headway
)
V
2
V
1
t
Time headway
2
、交通量(
Volume
、
F
low
Rate
)
单位时间
内,通过道路(或某一条车道)某一地点、某一断面的
交通实体数
。
Number of vehicles passing line A-A’
in an unit of time.
A
’
A
算术平均值(
arithmetic mean
)
平均值概念复习
几何平均值(
geometric mean
)
调和平均值(
harmonic mean
)
交通流参数
1)
时间平均车速(
TMS
)
单位时间内各车辆经过某断面的地点速度的算术平均值
2)
空间平均车速(
SMS
)
在某瞬间,某区间内的全部车辆的车速分布平均值。
当观测长度为一定时,其数值为地点车速观测值的调和平均值
.
TMS
=
A
’
A
V
i
(i=1,2, …N)
Average Travel Time:
SMS =
V
1
B
’
B
A
’
A
V
i
V
N
d
….
3
、速度(
Speed
)
地点车速
——
车辆通过道路某一点时的速度
X
—
位置,
t
—
时刻
时间平均车速
所有车辆地点车速的算术平均值
N
——
观测的车辆数
u
i
——
第
i
辆车的地点速度
在某一特定时刻,行驶于道路某一特定路段内全部车辆的地点车速分布平均值。
N
——
观测的车辆数
Δ
t
——
很短的时间间隔
s
i
——
Δ
t
时间内车辆行驶的距离
区间平均速度是地点速度的调和中项;区间平均速度小于时间平均速度。
分别为区间平均速度和时间平均速度的方差;区间平均速度与时间平均速度为一定条件下的线性关系。
3) TMS
与
SMS
间的关系
速度
21
例
:
设有
3
辆汽车,分别以
20
、
40
、
60km/h
的速度通过长度为
10km
的路段,试求时间平均车速和空间平均车速。
解:先求时间平均车速:
再求空间平均车速
速度
自由流(车速差别不大)下,两种平均车速相差不大
车速变化很大时,两种平均车速的差别很大
非拥挤路段
拥挤路段或信号交叉口前
区分
TMS
与
SMS
的意义
速度
4
、交通密度(
Traffic Density
)
某
瞬间
单位长度内一条车道上的车辆数,表示在一条车道上车辆的密集程度,常以
K
表示,
veh/km
定义
对于具有不同车道数的道路,为使车流密度具有可比性,车流密度应按单车道定义,单位:辆/
km
/车道。
密度是交通流中重要的参数,因为它直接反映了交通需求量。
交通密度也可用
车头间距
来表示
密度是瞬间值、是平均值,随着观测的时刻、路段长度而变化。
密度还可以近似地用来衡量驾驶员操纵车辆的舒适性和灵活性。
密度的应用:
管制、事故探测、服务水平
交通流参数
5
、车道占有率(
Occupancy
)
1.
空间占有率
在道路的一定路段上,车辆总长度与路段总长度之比,
%
车流密度只能表示车流的密集程度,而空间占有率则能反映某路段上车队的长度
。
2.
时间占有率
在道路的任一路段上,车辆通过时间的累计值与观测总时间的比值,以
%
表示。
交通流参数
6.
车头间距(
Spac Headway
)
在同向行驶的车队中,相邻两辆车的车头间的距离。用车辆上有代表性的点来测量,如前保险杠或前轮。
路段中所有车头间距的均值称为平均车头间距(
h
s
) 。
车头间距
hs
和密度之间的关系为
hs=1000/K
交通流参数
V
2
V
1
d = x
1
-x
2
Distance headway (feet)
x
1
x
2
26
待续
……
3-2
交通流参数调查方法
四类方法:
定点调查
小距离调查
沿路段长度调查
浮动车调查
(1)
调查方法
试验车以区间内大部分车辆均衡的速度反复行驶;
一人记录与试验车相反方向的来车辆数
M
;
一人记录同向行驶车辆中超越试验车的车辆数
O
;
一人记录同向行驶车辆中
被
试验车超越的车辆数
P
;
另一人记录时间
T
。
(2)
单向交通量计算方法
(3)
注意事项
试验车种类
时间段长(适用于短时段测量)
距离的测定
A
B
浮动车法
(
4)
调查数据计算
①测定方向上的交通量
q
c
:
X
a
:测试车逆测定方向行驶时,测试车对向来车数;
Y
c
:测试车在待测定方向行驶时,超越测试车的车辆数减去被测试车超越的车辆数。
②平均行程时间
③平均车速
浮动车法
在设计新的交通设施或管理方案时,需要预测某些具体的交通特征参数,并且希望用现有的或假设的有限数据作出预测。
设计左转专用道时,需预测一个信号周期内到达车辆超过
4
辆的次数(
车辆到达分布:离散型
);
设计人行横道交通管制系统,需预测主路车头时距分布 (
车头时距分布:连续型
);等等。
统计分布可以帮助技术人员得到确切的预测结果。
3-3
交通流参数的统计分布
车辆的到达在某种程度上具有随机性,基于概率论,描述这种随机性的
统计规律
有两种方法。
离散型分布(
计数分布
)
:考察在一段固定长度的时间
(
空间
)
内到达某场所的
交通数量
的波动性;
连续型分布:研究上述事件发生的
时间间隔
的统计特性。如车头时距、可穿越空档的概率分布。
引言
一
.
离散型分布
通常情况下,在一定时间间隔内
到达的车辆数
(或一定长度路段上分布的车辆数)是随机的,用离散型分布描述。
自由交通流、拥挤交通流、波动交通流
泊松分布
二项分布
负二项分布
P
(
k
)
——
在计数间隔
t
内到达
k
辆车或人的概率
;
λ
——
单位时间内的平均到达率
(
辆
/s
或人
/s)
;
t
——
每个计数间隔持续的时间
(s)
或距离
(m)
;
e
——
自然对数的底,取值为
2.71828;
均值
M
与方差
D
均为
λt
;
即
M=D=
λt
适用条件:交通量不大,自由交通流,车辆随机到达
1.
泊松(
Poisson
)分布
流的平稳性
对于任意的
t≥0
及
Δ
t≥0
,
在时间区间
(t,t+
Δ
t)
内有
n
个顾客到达的概率只与
Δ
t
有关,与时间区间的起点
t
无关
。
当
Δ
t
充分小时,在
(t,t+
Δ
t)
内有
一个
顾客到达的概率与
Δ
t
成正比,即
其中,
O(
Δ
t)
是当
Δ
t →0
时,关于
Δ
t
高阶无穷小;
λ
为单位时间内的顾客到达平均数。
1.
泊松(
Poisson
)分布
泊松流(最简单流)
-
形成条件
在时间轴上,互不相交的时间区段
和 内,顾客的到达数是相互独立的,即前一顾客的到达不影响后一顾客的到达
。
流的无后效性
当
t
充分小时,
在
t
时间内到达一个顾客的概率为
t +o(t )
,到达两个或两个以上顾客的概率为
o(t )
;即两个顾客不可能同时到达
流的普遍性
泊松流(最简单流)
-
形成条件
设把长为
Δ
t
的时间区间分成
m
等分,每段长度为
。若在
dt
内,有一个顾客到达,则称被
“
占着
”
,如果在
dt
内,没有顾客到达,则称为
“
空着
”
。
被
“
占着
”
的概率近似为
被
“
空着
”
的概率近似
根据流的无后效性,在
m
个
dt
中,有顾客到达与没有顾客到达可以看成是
m
次独立的试验
在长为
Δ
t
的时间区间内,到达
n
个顾客的概率
泊松分布
详解
在长为
Δ
t
的时间区间内,到达
n
个顾客的概率
在
m
个
dt
中,有
n
个
dt
被顾客
“
占着
”
的概率
利用二项定律
泊松分布
详解
dt
0
,
m
泊松分布
详解
①
到达数小于
k
辆车(人)的概率
(
m
=
λt
)
:
②
到达数小于等于
k
的概率:
③
到达数大于
k
的概率:
④
到达数大于等于
k
的概率:
泊松分布
公式
⑤
到达数至少是
x
但不超过
y
的概率:
⑥
用泊松分布拟合观测数据时,参数
m
按下式计算:
式中:
g
——
观测数据分组数;
f
j
——
计算间隔
t
内到达
k
j
辆车(人)这一事件发生的次(频)数;
k
j
——
计数间隔
t
内的到达数或各组的中值;
N
——
观测的总计间隔数。
1.
泊松(
Poisson
)分布
递推公式
应用条件
当观测数据的方差与均值
S
2
/m
的比值接近于(大约等于)
1
时,泊松分布表示合适;明显地不等于
1
时,泊松分布表示不合适。
1.
泊松(
Poisson
)分布
例题
-1
例题
某信号交叉口周期
C=97s,
有效绿灯时间
g=44s
,在有效绿灯时间内排队的车流以
s=900
辆
/h
的流量通过交叉口,在有效绿灯时间外到达的车辆要停车排队。设信号灯交叉口上游车辆的到达率
q=369
辆
/h
,且服从泊松分布,求:
使到达车辆不至于两次排队的周期能占的最大百分率
。
例题
-2
解:
一个周期内能通过的最大车辆数
A
=
gS
=
900×44/3600
=
11
辆,当某周期到达的车辆数
N≻11
辆时,则最后到达的(
N-11
)辆车就不能在本周期内通过而发生二次排队。
在泊松分布中,一个周期内平均到达的车辆数
m=λt
=
369×97/3600
=
9.9
辆。
则可能到达车辆数大于
11
辆的周期出现的概率为
即到达车辆不致两次排队的周期数最多占
71
%。
例题
P
(
k
)
—
计数间隔
t
内到达
k
辆车或
k
个人的概率;
λ
—
平均到达率
(
辆
/s
或人
/s)
;
t
—
每个计数间隔持续的时间
(s)
或距离
(m)
;
n
—
正整数;
适用条件:交通量大,拥挤交通流,自由行驶机会不多
2.
二项(
Binomial
)分布
① 贝努里(
Bernoulli
)概型:
1)
每次试验条件都一样,每次出现结果只有两个:
S
、
F
,
S
出现的概率为
p
;
2)
每次试验的结果不互相影响,或者称为相互独立;
3)
进行固定的
n
次试验,结果
S
出现次数的概率;
②
对于贝努里概型,结果
S
在
n
次试验中出现
k
次的概率
③
车流拥挤,自由流成份少,拥挤流等间距行驶,如果划分
n
组,每组作为一个“车辆事件”其概率为
④
“车辆事件”构成贝努里概型,得出到达车辆数概率
1)
二项分布公式估计拥挤流合理性分析
车辆数
观测频率
理论拟合频率
二项分布
泊松分布
<3
0
0.3
1.3
3
3
1.0
2.5
4
0
2.9
4.7
5
8
6.2
7.1
6
10
9.8
8.8
7
11
12.3
9.4
8
10
12.1
8.8
9
11
9.4
7.3
10
9
5.8
5.4
11
1
2.8
3.7
12
1
1.0
2.3
> 12
0
0.4
2.7
合计
64
64.0
64.0
m=7.469 S
2
=
3.999 S
2
/m=0.53
用
5%
置信水平按
2
检验
时,接受二项分布拟合,拒绝泊松分布拟合
1)
二项分布公式估计拥挤流合理性分析
通常记
p
=λt/
n
,
则二项分布可写成:
式中:0<
p<1,n、p
称为分布参数。
均值
M=
np
,
方差
D=
np
(1-
p
),M>D。
当用二项分布拟合观测数时,根据参数
p、n
与方差,均值的关系式,用样本的均值
m、
方差
S
2
代替
M、D,p、n
可按下列关系式估算:
1)
二项分布公式估计拥挤流合理性分析
2)递推公式
3)应用条件
车流拥挤,观测统计方差与平均值
S
2
/m
小于
1
时,交通流的车辆到达分布用二项分布拟合较好。
2.
二项(
Binomial
)分布
据统计某交叉口有
25%
的行人违章,交警随机拦住
5
人,问其中
2
人违章的概率是多少?
例题
-2
解:
行人违章的概率
p=0.25
,交警随机拦住
5
人
n=5,
则其中
2
人违章的概率为:
p
、
β
为负二项布参数。
0
<
p
<
1
,
β
为正整数。
3.
负二项(
Negative Binomial
)分布
适用条件
交通流波动性大或以一定的计算间隔观测到达的车辆数(人数)其间隔长度一直延续到高峰期间与非高峰期间两个时段时,所得数据可能具有较大的方差。
①
逆贝努里(
Bernoulli
)概型:
1)
每次试验条件都一样,每次出现结果只有两个:
S
、
F
,
S
出现的概率为
p
2)
每次试验的结果不互相影响,或者称为相互独立;
3)
保证出现
次结果
S
,进行随机试验(不确定)
k
次的概率;
②
对于如上概型,出现结果
次,进行
k
次试验的概率
③
车流波动,拥挤流随机,拥挤流等间距行驶,类似拥挤流处理方法,将事件
S
作为一个“车辆事件”处理
④
“车辆事件”构成逆贝努里概型,得出到达车辆数概率
1)
负二项分布公式估计波动流合理性分析
车辆数
观测频率
理论拟合频率
泊松分布
负二项分布
0
139
129.6
140.4
1
128
132.4
122.0
2
55
67.7
62.2
3
25
23.1
24.2
4
10
5.9
8.0
5
3
1.2
2.3
>5
0
0.1
0.9
合计
360
360.0
360.0
m=1.022 S
2
=
1.203 S
2
/m=1.177
用
5%
置信水平按
2
检验时,接受负二项分布拟合,拒绝泊松分布拟合
1)
负二项分布公式估计波动流合理性分析
由概率论可知:
均值
M=β(1-p)/p
,方差
D=β(1-p)/p
2
,
M<D。
当用负二项分布拟合观测数据时,利用
p、β
与均值、方差的关系式,用样本的均值
m、
方差
S
2
代替
M、D,p、β
可由下列关系式估算:
3.
负二项(
Negative Binomial
)分布
3)应用条件
车流波动性大,观测统计方差与平均值比
S
2
/m
大于
1
时,交通流的车辆到达分布用负二项分布拟合较好。
2
)递推公式
3.
负二项(
Negative Binomial
)分布
小结
车辆到达离散分布小结
车流自由行驶,当观测统计的方差与均值的比值
S
2
/m
大约等于
1
时,车辆到达泊松分布拟合效果好;
车流拥挤,观测统计方差与平均值
S
2
/m
小于
1
时,车辆到达分布用二项分布拟合效果好。
车流波动性大,观测统计方差与平均值比
S
2
/m
大于
1
时,车辆到达分布用负二项分布拟合效果较好。
Homework
作业
1
:
某铁路与公路相交的平面交叉口,当火车通过交叉口时,横木护栏挡住汽车通行。每次火车通过时,平均封锁公路
3min
,公路上平均每分钟有
4
辆汽车到达交叉口。求火车通过交叉口时,汽车排队长度超过
100m
的概率(即排队汽车超过
12
辆的概率)。
作业
2
:推导泊松分布
61
待续
……
62
描述事件之间时间间隔的分布称为连续型分布。
常用来描述
车头时距、穿越空档、速度
等交通流特性的分布特征。
二
.
连续型分布
通常情况下,在车辆到达之间的时间间隔
(
车头时距
)
是随机的,用连续型分布描述。
负指数分布
移位负指数分布
爱尔朗分布
韦布尔分布
正态分布
皮尔逊
III
型
(Pearson type III)
分布
复合分布
…
…
t
1
t
3
t
N
二
.
连续型分布
--
车头时距
车头时距是影响交通安全、道路通行能力和服务水平的重要交通流特性。
道路通行能力往往是由特定条件下的车头时距分布决定。
自由交通流
拥挤交通流
波动交通流
% (Distribution)
Time Gap (t)
1 2 3 4 5 6 7 8
车头时距分布
自由交通流
车头时距大
% (
分布
)
t
% (
分布
)
实际
理论
Random Distribution
t
% (
分布
)
实际
理论
几乎常数定值分布
拥挤交通流
车头时距小
波动交通流
车头时距复杂
车头时距分布
(1)
基本公式
计数间隔
t
内没有车辆到达
(
k=0)
的概率为:
P(0)=e
-
λ
t
在具体的时间间隔
t
内,如无车辆到达,则上次车到达和下次车到达之间,车头时距至少有
t
秒,换句话说,
P(0)
也是车头时距等于或大于
t
秒的概率,于是得:
P(h
≥
t)=e
-
λ
t
1
、负指数分布
--
自由交通流
二
.
连续型分布
而车头时距小于
t
的概率则为:
P(h<t)=1-e
-λt
若
Q
表示每小时的交通量,则
λ=Q/3600(
辆/
s),
前式可以写成:
P(h≥t)=e
-Qt/3600
式中
Qt/3600
是到达车辆数的概率分布的平均值。若令
M
为负指数分布的均值,则应有:
M=3600/Q=1/λ
负指数分布的方差为:
负指数分布
用样本的均值
m
代替
M、
样本的方差
S
2
代替
D,
即可算出负指数分布的参数
λ。
此外,也可用概率密度函数来计算。负指数分布的概率密度函数为:
负指数分布
泊松过程的到达间隔时间为
负指数分布
令
h
代表间隔时间,则概率
P
{
h
≥
△
t
}
代表时间区间
△
t
内没有顾客来的概率;由泊松分布
可知:
P
0
(
h
>
△
t
)=
P
{
h
≥
△
t
}=
e
△t
故间隔时间
h
的分布为
P
{
h
<
△
t
}=1
e
△t
泊松过程
负指数分布
n=0
负指数分布之所以常用,是因为它有很好的特性,使数学分析变得方便
无记忆性
。指的是不管一次服务已经过去了多长时间,该次服务所剩的服务时间仍服从原负指数分布
负指数分布的特点
(2)适用条件
负指数分布适用于车辆到达是随机的、有充分超车机会的单列车流和密度不大的多列车流的情况。通常认为当每小时每车道的不间断车流量等于或小于500辆,用负指数分布描述车头时距是符合实际的。
(
3)
分布图特点
负指数分布
如果顾客的到达过程服从最简单流,则顾客单位时间内的到达数服从泊松分布。
如果顾客的到达过程服从最简单流,则顾客到达的时间间隔服从负指数分布。
从本质上看,泊松分布与负指数分布是同一个过程的不同表现形式。
可适用于服务时间分布
小结
2
、移位负指数分布
——
克服
0
车头时距问题
(1)
基本公式
其概率密度函数为:
(2)适用条件
移位负指数分布适用于描述不能超车的单列车流的车头时距分布和车流量低的车流的车头时距分布。
式中: 为平均车头时距 。
二
.
连续型分布
3
.
正态分布
—
拥挤交通流
(1)
分布密度函数公式
:
式中:
f
(
t
)
---
车头时距为
t
的概率分布密度函数
p
--- 3.1416
t ---
车头时距
---
平均车头时距
---
标准差
概率分布函数:
(2)适用条件
可用于描述拥挤交通流车辆排队行驶的车头时距分布。
二
.
连续型分布
4.
爱尔朗(
Erl
ang)
分布
——
波动交通流
(1)
基本公式
其概率密度函数为:
式中
(2)适用条件
不同
k
值可用于描述不同车流的车头时距分布;如
k
=
1
时化为负指数分布,
K
趋向无穷时理论上为定长分布。
二
.
连续型分布
5.
韦布尔
(Weibull
)
分布
—
波动交通流
概率分布函数
其概率密度函数为:
不同
、、
值可用于描述不同车流的车头时距分布;
如
=
1
,
=
0
为负指数,而
K
0
为移位负指数分布
。
二
.
连续型分布
6.
皮尔逊Ⅲ型(
Pearson type III
)
分布
概率分布密度函数
式中
:
f (t) ---
概率密度函数
l
---
车辆到达率
K---
模型阶数可以在
0
和
之
间任意选择
---
最小车头时距
t ---
车头时距
---Gamma
函数
,
当
k
为自然数时等于
(K-1)!
皮尔逊Ⅲ型分布当
=
0
时
为
Erlang
,当
>0,k=1
时
为移位负指数
二
.
连续型分布
7.
组合型分布
概率分布函数
式中
:
a
---
受限(拥挤)交通流所占比例
8.
M3
分布
——Cowan
概率分布密度函数
式中
:
a
---
自由交通流所占比例
二
.
连续型分布
交通流基本参数的关系
交通量
Q
密度
K
车速
V
交通流基本参数
交通流理论的核心内容之一
三参数基本关系:
Q=K
*V
交通流基本参数
自由流速度 :
车流密度趋于零,车辆可以畅行无阻时的平均速度
(
Free-flow Speed
)
v
f
阻塞密度 :
车流密集到车辆无法移动
(V=0)
时密度。
(
Jam Density
)
K
j
临界密度 :
即流量达到极大时的密度。
(
Critical Density
)
K
m
临界速度 :
即流量达到极大时的速度。
(
Critical Speed
)
v
m
最大流量
Q
m
:
就是
Q
-
V
曲线上的峰值。
0
流量
交通流特征变量
1
、格林希尔茨(
Green Shields
)模型
—
线性模型
中等密度
(一)速度-密度关系
v
f
– free-flow speed (can be observed)
K
j
- jam density (can be estimated)
185-250
vpmpl
(
Traffic Flow Fundamentals
)
2
、格林柏(
Greenberg
)模型
—
对数模型
高密度
(一)速度-密度关系
u
m
= Design Speed / 2
u
m
= Optimal Speed, resulting in q
max
u
m
: difficult to estimate
3
、安德伍德(
Underwood
)模型
——
指数模型
低密度
(一)速度-密度关系
K
m
= Optimal Density, resulting in q
max
K
m
: difficult to estimate
基于
Green Shields
线性模型及交通流基本关系:
(二)流量-密度关系
同 理
高密度
格林柏格
(Grenberg)
对数模型
低密度
安德伍德
(Underwood)
指数模型
(二)流量-密度关系
Q
m
、
V
m
和
K
m
是划分交通是否拥挤的重要特征值。
当
Q≤Q
m
、
K
>
K
m
、
V
<
V
m
时,交通拥挤
当
Q≤Q
m
、
K≤K
m
、
V≥V
m
时,交通不拥挤。
(二)流量-密度关系
由
Green Shields
线性模型做变换得到:
代入交通特性三参数基本关系模型,得到:
(三)流量-速度关系
格林希尔茨(
Green Shields
)模型
——
线性模型
中等密度
格林柏(
Greenberg
)模型
——
对数模型
高密度
安德伍德(
Underwood
)模型
——
指数模型
低密度
西北大学模型
(Northwestern University)
(1)
单阶段模型
: Single-Regime Models
Show Figure. 10.7
Show Table 10.1
多阶段模型
-Multi-Regime Models
Show Table 10.2
The first difficulty is determining the breakpoint between regimes.
Show Figure. 10.8
Show Table. 10. 3
(2)
多阶段模型
:
Multi-Regime Models
已知某公路畅行速度为
V
f
=80Km
/
h
,饱和密度为
K
j
=96
辆/
Km
,且已知速度与密度具有
V=b-aK
,求:
1
)该路段在密度为
30
辆/
Km
时的路段平均交通量?
2
)该道路的最大交通量为多少,对应的速度和密度值是多少?
例题
-1
解:
由格林希尔茨线性模型 有:
b=V
f
=80
,
a=V
f
/K
j
=80/96
,
V=80-80/96*30=55 Km
/
h
Q=KV=30*55=1650
辆
/
小时
Q=KV= K(b-aK)
,
令
dQ/dK=b-2aK=0
,得
K
m
=48
辆/
Km
,则
V
m
=80-80/96*48=40 Km
/
h
Q
m
=K
m
V
m
=48*40=1920
辆
/
小时
例题
-1
设车流的速度密度的关系为
V=88-1.6K,
如限制车流的实际流量不大于最大流量的0.8倍,求速度的最低值和密度的最高值?
(假定车流的密度<最佳密度
K
m
)
例题
-2
解
:
当
K=0
时,
V=V
f
=88km/h,
当
V=0
时,
K=K
j
=55
辆/
km。
则:
V
m
=44Km/h,K
m
=27.5
辆/
km,Q
m
=V
m
K
m
=1210
辆/
h。
由
Q=VK
和
V=88-1.6K,
有
Q=88K-1.6
K
2
(
如图
)。
当
Q=0.8Q
m
时,由88
K-1.6
K
2
=0.8Q
m
=968,
得:
K
A
=15.2,K
B
=39.8。
由题意可知,所求密度小于
K
m
,
故为
K
A
。
当密度为
K
A
=15.2
辆/
km,
其速度为:
V
A
=88-1.6K
A
=63.68km/h
K
A
=15.2
辆/
km,V
A
=63.68km/h
为所求密度最高值与速度最低值。
例题
-2
示例
-《Traffic Flow
Fundamentals
》
1. Impact of Location
Note: Location and time period of field measurements significantly affect the resulting speed-flow-density measurements.
Show Figure. 10.2
2.
Field Observation
Show Figure. 10.3 (high speed)
Show Figure. 10.4 (55 mph)
Show Figure. 10.5 (in a tunnel)
Show Figure. 10.6 (arterial street)
小结
1
、掌握交通流三参数关系模型的推导;
2
、熟练应用交通流三参数关系模型;
3
、了解交通流参数的现场采集方法
Homework
跟 驰 理 论
