

- 72.10 KB
- 2022-08-30 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
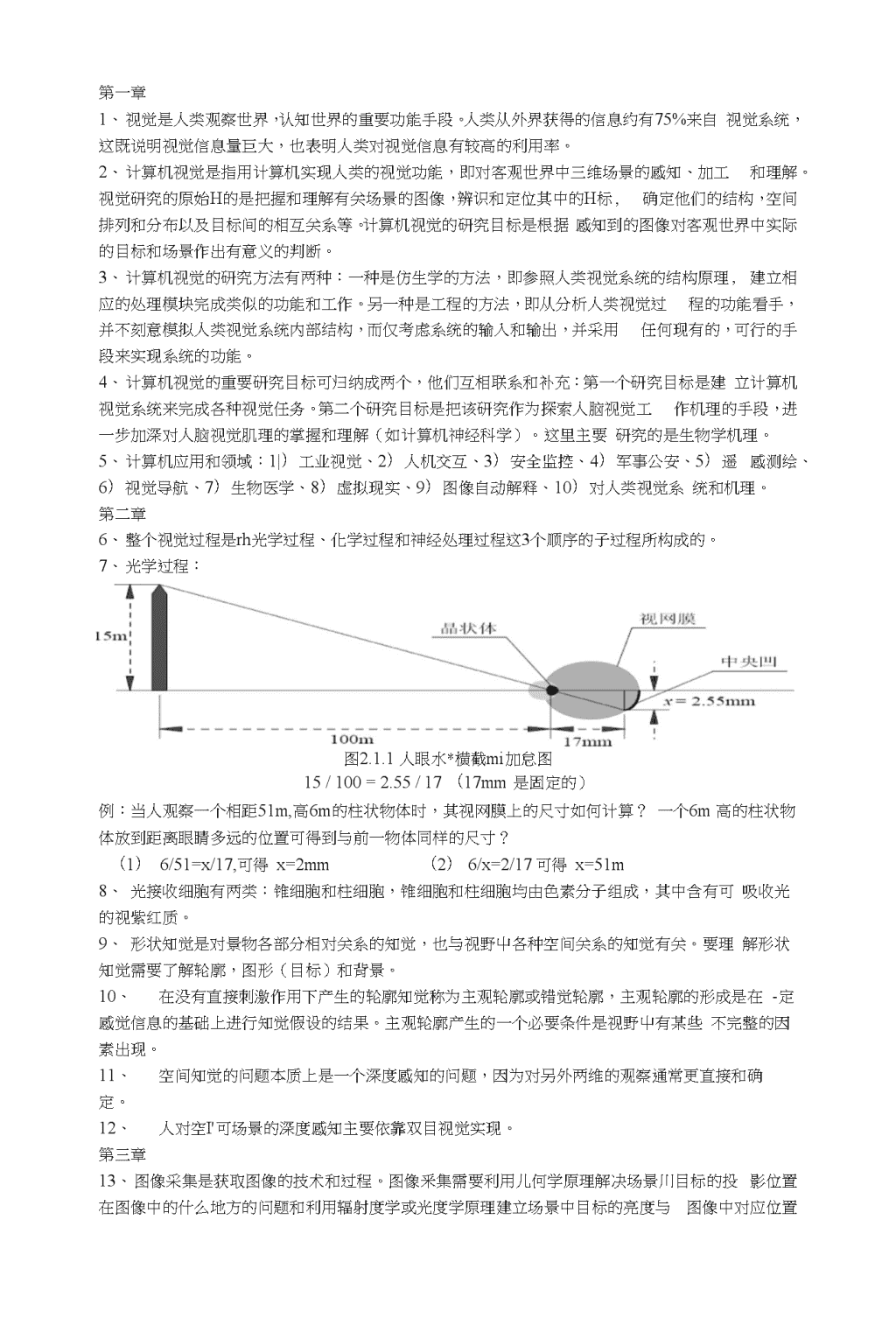
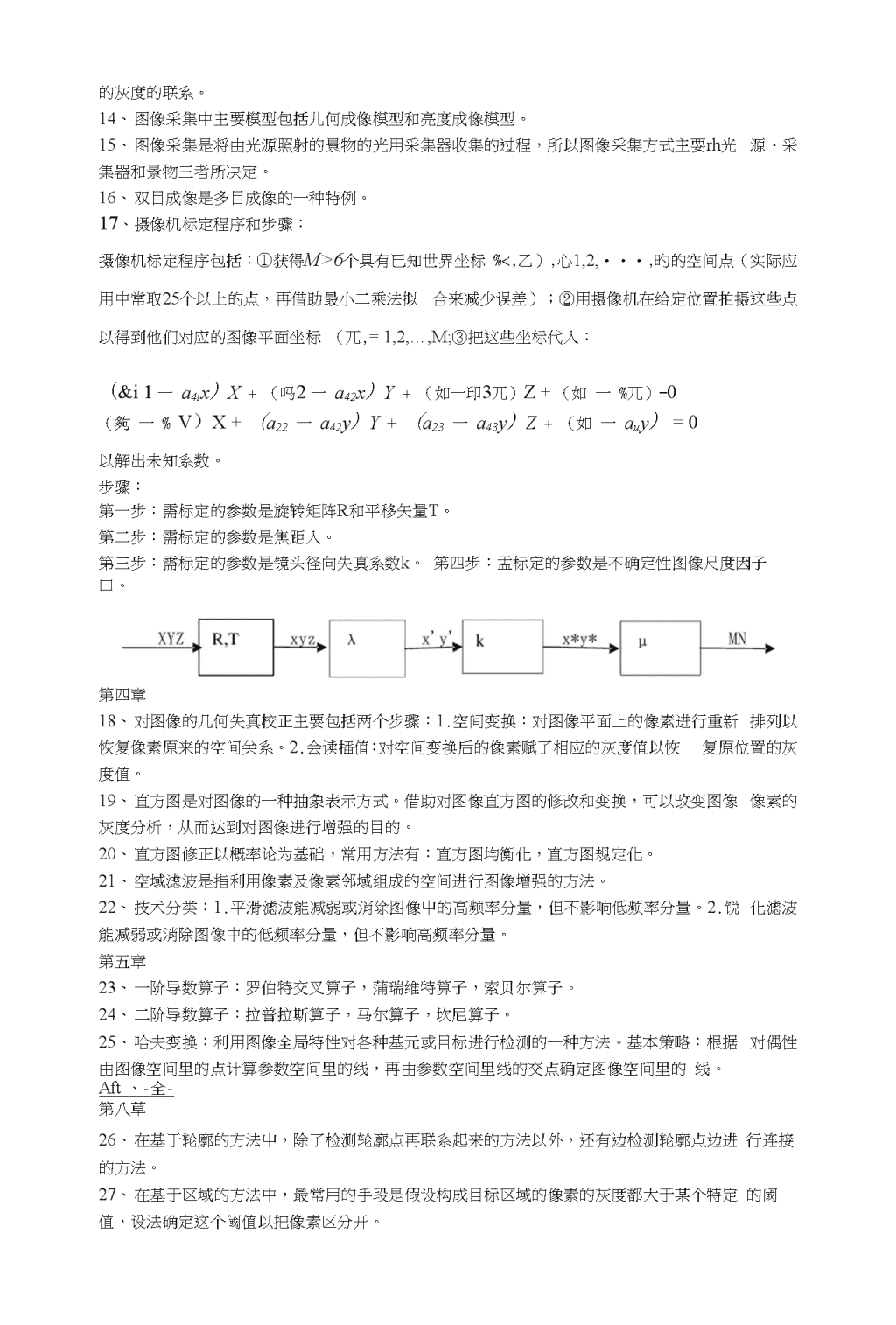
第一章1、视觉是人类观察世界,认知世界的重要功能手段。人类从外界获得的信息约有75%来自视觉系统,这既说明视觉信息量巨大,也表明人类对视觉信息有较高的利用率。2、计算机视觉是指用计算机实现人类的视觉功能,即对客观世界中三维场景的感知、加工和理解。视觉研究的原始H的是把握和理解有关场景的图像,辨识和定位其中的H标,确定他们的结构,空间排列和分布以及目标间的相互关系等。计算机视觉的研究目标是根据感知到的图像对客观世界中实际的目标和场景作出有意义的判断。3、计算机视觉的研究方法有两种:一种是仿生学的方法,即参照人类视觉系统的结构原理,建立相应的处理模块完成类似的功能和工作。另一种是工程的方法,即从分析人类视觉过程的功能看手,并不刻意模拟人类视觉系统内部结构,而仅考虑系统的输入和输出,并采用任何现有的,可行的手段来实现系统的功能。4、计算机视觉的重要研究目标可归纳成两个,他们互相联系和补充:第一个研究目标是建立计算机视觉系统来完成各种视觉任务。第二个研究目标是把该研究作为探索人脑视觉工作机理的手段,进一步加深对人脑视觉肌理的掌握和理解(如计算机神经科学)。这里主要研究的是生物学机理。5、计算机应用和领域:1|)工业视觉、2)人机交互、3)安全监控、4)军事公安、5)遥感测绘、6)视觉导航、7)生物医学、8)虚拟现实、9)图像自动解释、10)对人类视觉系统和机理。第二章6、整个视觉过程是rh光学过程、化学过程和神经处理过程这3个顺序的子过程所构成的。7、光学过程:图2.1.1人眼水*横截mi加怠图15/100=2.55/17(17mm是固定的)例:当人观察一个相距51m,高6m的柱状物体时,其视网膜上的尺寸如何计算?一个6m高的柱状物体放到距离眼睛多远的位置可得到与前一物体同样的尺寸?(1)6/51=x/17,可得x=2mm(2)6/x=2/17可得x=51m8、光接收细胞有两类:锥细胞和柱细胞,锥细胞和柱细胞均由色素分子组成,其中含有可吸收光的视紫红质。9、形状知觉是对景物各部分相对关系的知觉,也与视野屮各种空间关系的知觉有关。要理解形状知觉需要了解轮廓,图形(目标)和背景。10、在没有直接刺激作用下产生的轮廓知觉称为主观轮廓或错觉轮廓,主观轮廓的形成是在-定感觉信息的基础上进行知觉假设的结果。主观轮廓产生的一个必要条件是视野屮有某些不完整的因素出现。11、空间知觉的问题本质上是一个深度感知的问题,因为对另外两维的观察通常更直接和确定。12、人对空I'可场景的深度感知主要依靠双目视觉实现。第三章13、图像采集是获取图像的技术和过程。图像釆集需要利用儿何学原理解决场景川目标的投影位置在图像中的什么地方的问题和利用辐射度学或光度学原理建立场景中目标的亮度与\n图像中对应位置的灰度的联系。14、图像采集中主要模型包括儿何成像模型和亮度成像模型。15、图像采集是将由光源照射的景物的光用采集器收集的过程,所以图像采集方式主要rh光源、采集器和景物三者所决定。16、双目成像是多目成像的一种特例。17、摄像机标定程序和步骤:摄像机标定程序包括:①获得M>6个具有已知世界坐标%<,乙),心1,2,・・・,旳的空间点(实际应用中常取25个以上的点,再借助最小二乘法拟合来减少误差);②用摄像机在给定位置拍摄这些点以得到他们对应的图像平面坐标(兀,=1,2,…,M;③把这些坐标代入:(&i1一a4ix)X+(吗2一a42x)Y+(如一印3兀)Z+(如一%兀)=0(夠一%V)X+(a22一a42y)Y+(a23一a43y)Z+(如一auy)=0以解出未知系数。步骤:第一步:需标定的参数是旋转矩阵R和平移矢量T。第二步:需标定的参数是焦距入。第三步:需标定的参数是镜头径向失真系数k。笫四步:盂标定的参数是不确定性图像尺度因子口。第四章18、对图像的几何失真校正主要包括两个步骤:1.空间变换:对图像平面上的像素进行重新排列以恢复像素原来的空间关系。2.会读插值:对空间变换后的像素赋了相应的灰度值以恢复原位置的灰度值。19、直方图是对图像的一种抽象表示方式。借助对图像直方图的修改和变换,可以改变图像像素的灰度分析,从而达到对图像进行增强的目的。20、直方图修正以概率论为基础,常用方法有:直方图均衡化,直方图规定化。21、空域滤波是指利用像素及像素邻域组成的空间进行图像增强的方法。22、技术分类:1.平滑滤波能减弱或消除图像屮的高频率分量,但不影响低频率分量。2.锐化滤波能减弱或消除图像中的低频率分量,但不影响高频率分量。第五章23、一阶导数算子:罗伯特交叉算子,蒲瑞维特算子,索贝尔算子。24、二阶导数算子:拉普拉斯算子,马尔算子,坎尼算子。25、哈夫变换:利用图像全局特性对各种基元或目标进行检测的一种方法。基本策略:根据对偶性由图像空间里的点计算参数空间里的线,再由参数空间里线的交点确定图像空间里的线。Aft、-全-第八草26、在基于轮廓的方法屮,除了检测轮廓点再联系起来的方法以外,还有边检测轮廓点边进行连接的方法。27、在基于区域的方法中,最常用的手段是假设构成目标区域的像素的灰度都大于某个特定的阈值,设法确定这个阈值以把像素区分开。\n28、基于对轮廓进行搜索的两种目标分割方法:图搜索方法是把轮廓搜索转化为在图中搜索代价最小的路径;动态规划则借助启发性知识来减少搜索计算量。29、根据所用阈值的特点可将阈值分割方法分为3类:(1)、全局阈值。(2)、局部阈值。(3)、动态阈值。第八章30、紧凑性是一个重要的形状性质,他描述了构成目标的点集在空间上分布的紧凑性。圆是紧凑性最高的形状。紧凑性与形状的伸长性成反比的关系。31、形状因子在一定程度上描述了区域的紧凑性。它没有量纲,所以对尺度变换不敏感。除掉由于离散区域旋转带来的误差,它对旋转也不敏感。形状因子对非规则性比较敏感,所以对描述非规则的圆形目标比较有效。外观比是一个比较容易计算的描述符,但它不适合用來描述非规则性。第九章32、一个完整的立体视觉系统可以划分为6个模块:(1)摄像机标定。(2)、图像获取。(3)、特征提取。(4)、立体匹配。(5)、3-D信息恢复。(6)、后处理。33、立体匹配的定义:立体匹配是指根据对所选特征的计算来建立特征间的对应关系,从而建立同一个空间点在不同图像中的像点之间的关系,并市此得到相应的视差图像。立体匹配是立体视觉屮最重要,最困难的步骤。34、立体匹配算法分类:基于区域的立体匹配和基于特征的立体匹配。35、经典算法:基于区域的立体兀配有:模板兀配和双目立体兀配;基于特征的立体兀配有:点对点的方法和动态规划匹配。36、获得双目图像中点的对应关系称为立体匹配。目前实用的技术主要分为两类,即灰度相关和特征匹配。前一类是基于区域的方法,后一类是基于特征点的方法。基于区域立体匹配方法,最简单的方法是考虑区域的灰度,一种经典的方法是计算最小平方误差。第十一章37、运动分为两类:(1)、前景运动,前景运动是指目标在场景中的自身运动,又称为局部运动。(2)、背最运动,背景运动是指由进行拍摄的摄像机的运动所造成的帧图像内所有点的整体移动,又称为全局运动或摄像机运动。38、从图像序列屮检测运动目标,并将其分割出来可看做是一个空间分割的问题。第十二章39、统计模式识别是指根据模式统计特性用一系列自动技术确定决策函数并将给定模式赋值和分类,主要工作是选取特征表达模式和设计分类器进行分类。4()、最小距离分类器是一种简单的模式分类器。,它基于对模式的采样来估计各类模式的统计参数,并完全由各类的均值和方差确定。41、最优统计分类器是一种基于概率的模式分类器,适用于对随机产生的模式进行分类。42、两种代表性的训练感知机的方法:线性可分类和线性不可分类。43、支持向量机是一种对线性分类器的最优设计方法论。线性可分类和线性不可分类。44、结构模式识别也称句法模式识别。实现结构模式识别需要定义一组模式基元,一组确定这些基元相互作用的规则和一个识别器(也称白动机)。计算题:1、平移变换\n10x010・x°oi%厂1_0150010012、尺度变换怪I2.1.1人眼水平檢〔截1(11—点怪Is.001/s,000Sy0S-l=01/Sy00010013、旋转变换COS&sin&0_COS&一sin&0~R=一sin&COS&0/?1=sin&COS&0_001_00I15/100=2.55/17(17mm是固定的)11.12设有两帧在相邻时刻拍摄的图像,给出根据像素亮度变化,计算摄像机运动参数的公式。解:根据题意,设光源和场景都没有随吋I'可变化,像素亮度变化是由摄像机运动而产生的。如果用兀⑴和歹⑴表示空间点P在时刻t的图像坐标,则在t+dt时亥ij,P点所对应的新图像坐标为:x(r+dt)=k_1e+'T:y(/+dr).-01Ty_其中和7;对应摄像机运动参数,k表示尺度变化,()表示摄像机的旋转角,7;和7;表示摄像机的平移量。空间点P的运动速度为:力一力©力一一---WV'k-Xke'丄Tx-kek-\十Ty代入光流方程,可得:(£兀+九刃伙_1)+(fyx一fxy)kO+fxTx+fyTy+力=0由于摄像机的运动导致所有图像像素(设共有N个)发生相同的变化,所以可得\nfA=B其中伪Nx4的矩阵,每一行等于[心+心fyx-fxyfx/J3为Wx啲向量,每个元素等于・/;;A为1x46勺向量[—IkTxTj由于人,人,/;均可从图像中算的,所以得至I”和氏最后,利用最小二乘法可解得:人=fTB即可得摄像机运动参数随像素亮度变化(包括空间变化和时间变化)的关系。1、计算机视觉是指用计算机实现人类的视觉功能,即对客观世界中三维场景的感知、加工和理解。视觉研究的原始目的是把握和理解有关场景的图像,辨识和定位英中的目标,确定他们的结构,空间排列和分布以及目标间的相互关系等。计算机视觉的研究目标是根据感知到的图像对客观世界中实际的目标和场景作出有意义的判断。计算机视觉的研究方法有两种:一种是仿生学的方法,即参照人类视觉系统的结构原理,建立相应的处理模块完成类似的功能和工作。另一种是工程的方法,即从分析人类视觉过程的功能着手,并不刻意模拟人类视觉系统内部结构,而仅考虑系统的输入和输出,并采用任何现有的,可行的手段來实现系统的功能。计算机视觉的重要研究目标对归纳成两个,他们互相联系和补充:第一个研究冃标是建立计算机视觉系统来完成各种视觉任务。第二个研究目标是把该研究作为探索人脑视觉工作机理的手段,进一步加深对人脑视觉肌理的常握和理解(如计算机神经科学)。这里主要研究的是生物学机理。2、摄像机标定的步骤和程序:标定程序和步骤:程序:摄像机标定程序包括:①获得M>6个具有已知世界坐标(乙必,乙),心1,2,…,M的空间点(实际应用中常取25个以上的点,再借助最小二乘法拟合来减少误差);②用摄像机在给定位置拍摄这些点以得到他们对应的图像平而坐标(兀,%),心1,2,…,③把这些坐标代入:(如-a4ix)X+(d|2-a42x)Y+(al3-a43x)Z+(ai4-a^x)=0(勺1一。41刃X+(如一偽2刃丫+(。23一%y)Z+@24一%刃=。以解出未知系数。步骤:笫一步:需标定的参数是旋转矩阵R和平移矢量To第二步:需标定的参数是焦距入。第三步:需标定的参数是镜头径向失真系数k。第四步:需标泄的参数是不确泄性图像尺度因子口。\n3、立体匹配定义,分类,常见方法:(1)、立体匹配的定义:立体匹配是指根据对所选特征的计算來建立特征间的对应关系,从而建立同一个空间点在不同图像中的像点之间的关系,并市此得到相应的视差图像。立体匹配是立体视觉屮最重要,最困难的步骤。(2)、立体匹配算法分类:基于区域的立体匹配和基于特征的立体匹配。(3)、经典算法:基于区域的立体匹配有:模板匹配和双目立体匹配;基于特征的立体匹配有:点对点的方法和动态规划匹配。程序:图像的均衡化处理:I=imread(,F:\fengjing.jpg,);imshow(I)J=rgb2gray(I);H=histeq(J);%计算和显示灰度图像J的直方图subplot(2,2,1),imshow(J)titleC原图像J;subplot(2,2,2),imshow(H)titleC均衡化的图像J;subplot(2,2,3),imhist(J)%显示原始图像直方图titleC原始图像直方图J;subplot(2,2,4),imhist(H)%显示均衡化后图像的直方图titled均衡化后图像的直方图J;图像的规定化处理:I=imread(,F:\fengjing.jpg,);imshow(I)J=rgb2gray(I);H=histeq(J);[counts,xl=imhist(H);%获得均衡化处理后直方图各像素点灰度级以便后面图像规定化%直方图规定化处理K=imread(,F:\fengjing.jpg');imshow(K)P=rgb2gray(K);subplot(2,2,l),imshow(P);titleC要规定化的原图像);%显示要规定化的图像及标题subplot(2,2,2),imhist(P);山1*要规定化图像的直方图%显示要规定化的图像直方图及标题%(4)进行规定化处理,代码及效果图如图4所示:L=histeq(P,counts);%规定化处理subplot(2,2,3)4rnshow(L);title。规定化后的图像);%显示规定化后图像及标题\nsubplot(224),imhist(L);titled规定化后图像的直方图);%显示规定化后的图像直方图及标题边沿检测:I=imread(,F:\fengjing.jpg');a=rgb2gray(I);%选取的是jpg格式的图片,试用要进行灰度处理subplot(2,3,1),imshow(a);titleC原图像');b二edge(a,'Roberts,);%灰度图的边缘提取c二edge(a,'Prewitt');d=edge(a,'SobeT);e=edge(a,'canny');%c=edge(a,'canny',0.04);e二edge(a,'canny,,0.08);f二edge(a,'log');%d=edge(a,'log',0.008);f=edge(a,'log,,0.001);subplot(2,3,2),imshow(b);titleCSobel算子图');subplot(2,3,3),imshow(c);titleRobert算子图');subplot(2,3,4),imshow(d);titlePrewitt算子图');subplot(2,3,5),imshow(e);title(Jcanny算子图');subplot(2,3,6),imshow(f);titleClog算子图');