

- 724.84 KB
- 2022-08-30 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
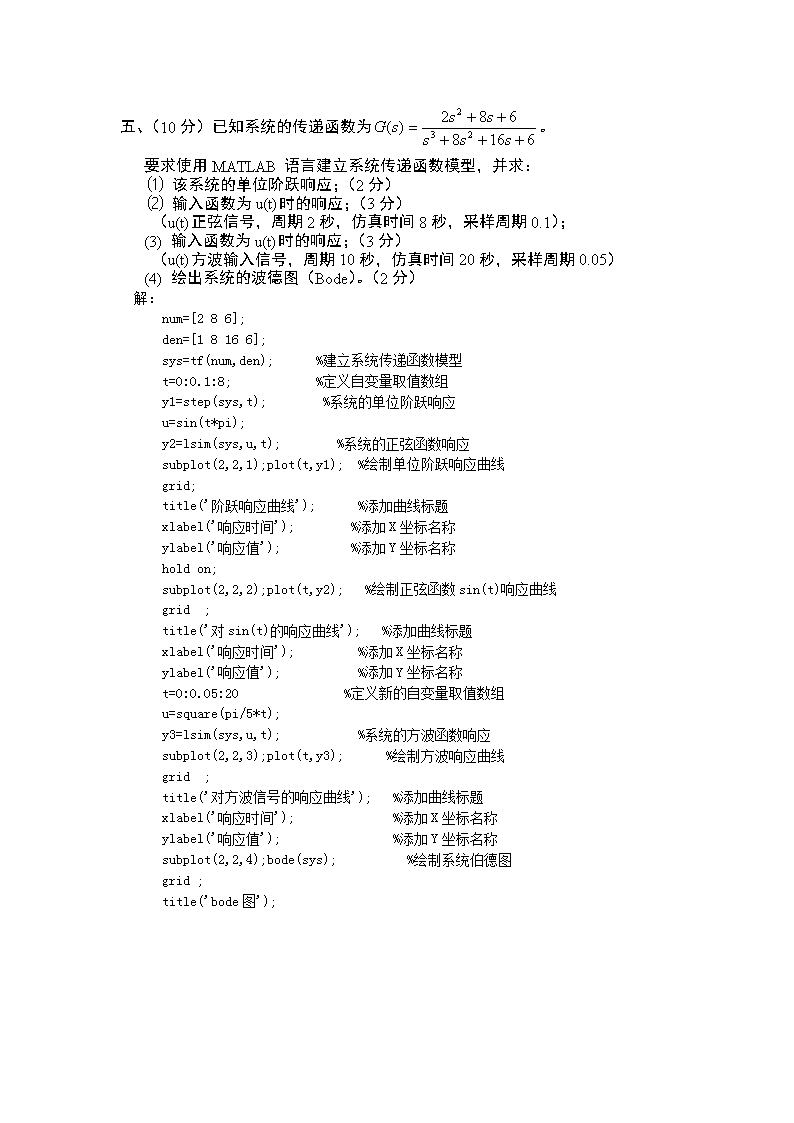
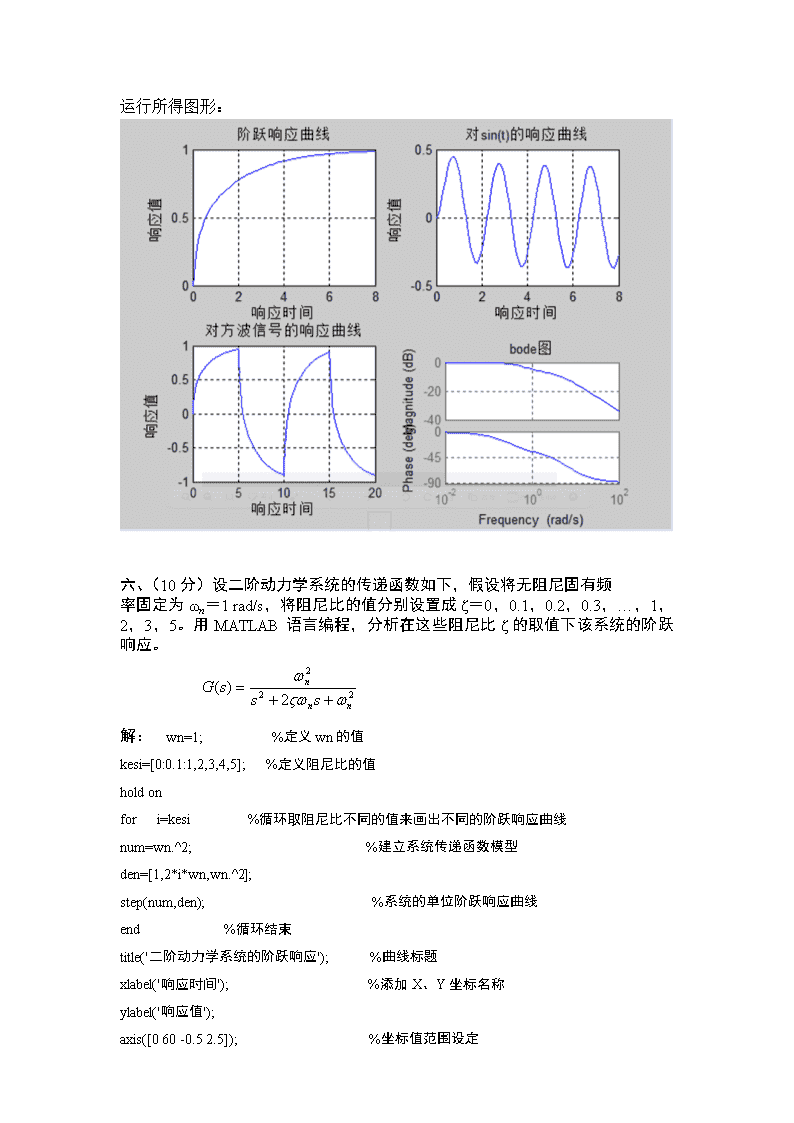
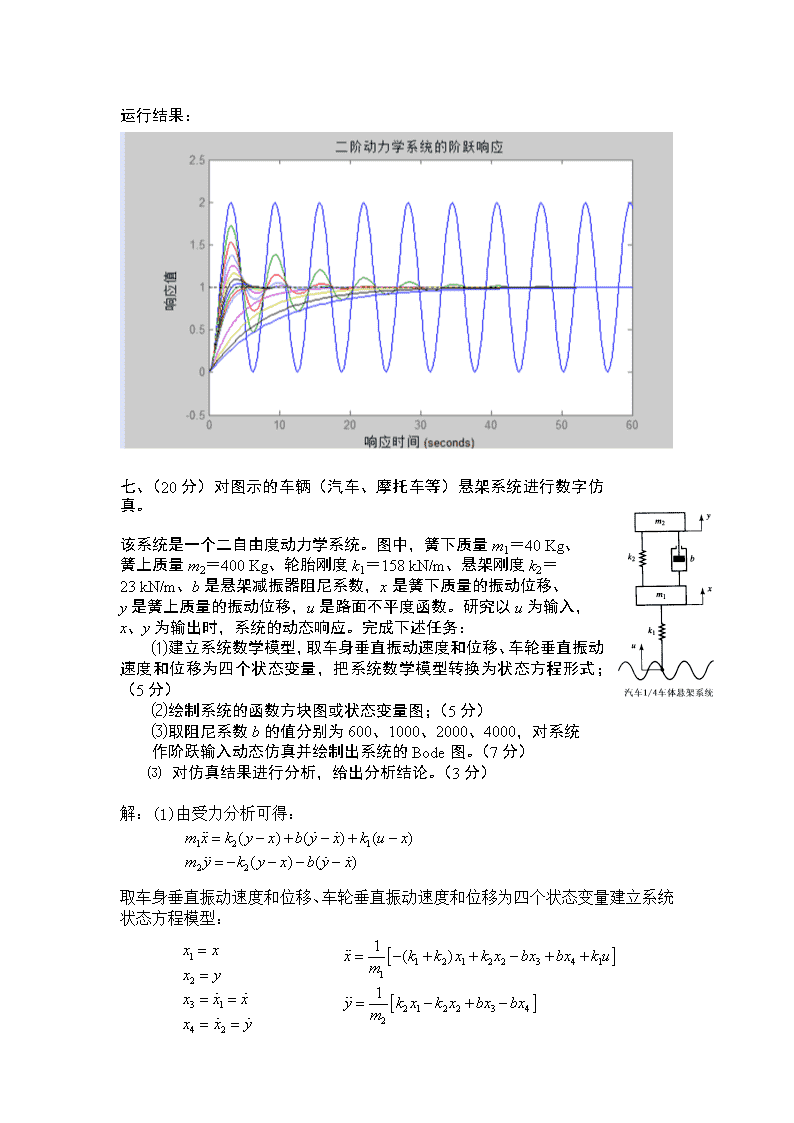
五、(10分)已知系统的传递函数为。要求使用MATLAB语言建立系统传递函数模型,并求:⑴该系统的单位阶跃响应;(2分)⑵输入函数为u(t)时的响应;(3分)(u(t)正弦信号,周期2秒,仿真时间8秒,采样周期0.1);(3)输入函数为u(t)时的响应;(3分)(u(t)方波输入信号,周期10秒,仿真时间20秒,采样周期0.05)(4)绘出系统的波德图(Bode)。(2分)解:num=[286];den=[18166];sys=tf(num,den);%建立系统传递函数模型t=0:0.1:8;%定义自变量取值数组y1=step(sys,t);%系统的单位阶跃响应u=sin(t*pi);y2=lsim(sys,u,t);%系统的正弦函数响应subplot(2,2,1);plot(t,y1);%绘制单位阶跃响应曲线grid;title('阶跃响应曲线');%添加曲线标题xlabel('响应时间');%添加X坐标名称ylabel('响应值');%添加Y坐标名称holdon;subplot(2,2,2);plot(t,y2);%绘制正弦函数sin(t)响应曲线grid;title('对sin(t)的响应曲线');%添加曲线标题xlabel('响应时间');%添加X坐标名称ylabel('响应值');%添加Y坐标名称t=0:0.05:20%定义新的自变量取值数组u=square(pi/5*t);y3=lsim(sys,u,t);%系统的方波函数响应subplot(2,2,3);plot(t,y3);%绘制方波响应曲线grid;title('对方波信号的响应曲线');%添加曲线标题xlabel('响应时间');%添加X坐标名称ylabel('响应值');%添加Y坐标名称subplot(2,2,4);bode(sys);%绘制系统伯德图grid;title('bode图');\n运行所得图形:六、(10分)设二阶动力学系统的传递函数如下,假设将无阻尼固有频率固定为ωn=1rad/s,将阻尼比的值分别设置成ζ=0,0.1,0.2,0.3,…,1,2,3,5。用MATLAB语言编程,分析在这些阻尼比ζ的取值下该系统的阶跃响应。解:wn=1;%定义wn的值kesi=[0:0.1:1,2,3,4,5];%定义阻尼比的值holdonfori=kesi%循环取阻尼比不同的值来画出不同的阶跃响应曲线num=wn.^2;%建立系统传递函数模型den=[1,2*i*wn,wn.^2];step(num,den);%系统的单位阶跃响应曲线end%循环结束title('二阶动力学系统的阶跃响应');%曲线标题xlabel('响应时间');%添加X、Y坐标名称ylabel('响应值');axis([060-0.52.5]);%坐标值范围设定\n运行结果:七、(20分)对图示的车辆(汽车、摩托车等)悬架系统进行数字仿真。该系统是一个二自由度动力学系统。图中,簧下质量m1=40Kg、簧上质量m2=400Kg、轮胎刚度k1=158kN/m、悬架刚度k2=23kN/m、b是悬架减振器阻尼系数,x是簧下质量的振动位移、y是簧上质量的振动位移,u是路面不平度函数。研究以u为输入,x、y为输出时,系统的动态响应。完成下述任务:⑴建立系统数学模型,取车身垂直振动速度和位移、车轮垂直振动速度和位移为四个状态变量,把系统数学模型转换为状态方程形式;(5分)⑵绘制系统的函数方块图或状态变量图;(5分)⑶取阻尼系数b的值分别为600、1000、2000、4000,对系统作阶跃输入动态仿真并绘制出系统的Bode图。(7分)⑴对仿真结果进行分析,给出分析结论。(3分)解:(1)由受力分析可得:取车身垂直振动速度和位移、车轮垂直振动速度和位移为四个状态变量建立系统状态方程模型:\n(2)仿真框图:(3)程序:m1=40;m2=400;k1=158;k2=23;k1=1000*k1;k2=1000*k2;%给参数赋值p(1)=600;p(2)=1000;p(3)=2000;p(4)=4000;%阻尼系数的值forn=1:4b=p(n);fangz;%调用状态方程A=[0010;0001;-(k1+k2)/m1k2/m1-b/m1b/m1;k2/m2-k2/m2b/m2-b/m2];B=[0;0;k1/m1;0];C=zeros(1,4);C(2)=1;D=0;sys(n)=ss(A,B,C,D);%建立系统状态空间模型endfigure('name','悬架系统的阶跃响应','numbertitle','off');t=0:0.01:25;step(sys(1),sys(2),sys(3),sys(4),t);%系统单位阶跃响应曲线grid;title('簧上质量位移响应曲线');%添加曲线标题xlabel('响应时间');ylabel('响应值');%添加X、Y坐标轴名称figure('name','悬架系统的bode图','numbertitle','off');w=logspace(0.3,3.0);bode(sys(1),sys(2),sys(3),sys(4),w);%绘制系统伯德图grid;title('簧上质量的bode图');disp('display:matrixA,B');disp('matrixA='),disp(A),%输出状态空间变量系数矩阵Adisp('matrixB='),disp(B),%输出状态空间输入系数矩阵B\nws=sqrt(k2/m2)/m1,disp(ws);%输出系统的系数wswt=sqrt(k2+k1/m1)/m1,disp(wt);%输出系统的系数wt仿真结果:运行结果:\n结果分析:当wn为不变值时,随着减震器阻尼系数增大,则最大超调量减小,振荡周期增长,即振荡减弱,平稳性好。另外,随着阻尼比增大,上升时间和峰值时间也增大,使初始响应速度变慢。根据分析可得当b=4000时系统稳定性最好.