

- 588.50 KB
- 2021-05-10 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
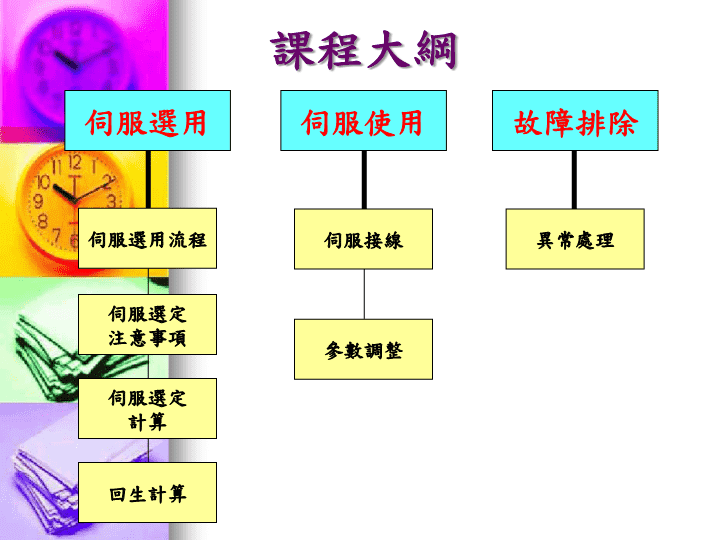
課程大綱
伺服選用
伺服使用
故障排除
伺服選用流程
伺服選定
注意事項
伺服選定
計算
伺服接線
參數調整
異常處理
回生計算
※
選用何種馬達
1
、性能要求:定位、定速、定扭力
2
、速度要求:高速
、
低速
3
、
定位要求
4
、尺寸
5
、價格
馬達選用的規格
1
、馬達容量
(
W
)
2
、
馬達額定轉速(
rpm
)
3
、
額定扭矩及最大扭矩(
N • m
)
4
、
轉子慣量(
kg
•
㎡
)
5
、
是否需要煞車(制動器)
6
、體積、重量、尺寸
※
如何選定伺服馬達(
1∕3
)
馬達選用考慮因素
1
、負載機構
2
、
動作模式
3
、負載速度
4
、定位精度
5
、使用環境
※
如何選定伺服馬達(
2∕3
)
減速機構的影響
1
、回轉速度:
N
M
=
Nt
×R
2
、
扭力
:
T
L
= T
ℓ
×
(
1÷R
)
3
、
慣量
(
GD
²
)
:
GD
²
L
= GD
²
L
×
(
1÷R
)
²
1
、負載扭力
◎加速扭力≦馬達最大扭力
◎連續實效負載扭力≦馬達額定扭力
◎消耗回生電力<驅動器內回生容量
◎負載扭力<馬達額定扭力
2
、負載慣性矩<
3
~
5
倍馬達轉子慣性矩
3
、最大移動速度<馬達最大轉速
4
、負載率在
85﹪
以下
5
、馬達的扭矩特性
※
如何選定伺服馬達(
3∕3
)
AC
伺服馬達的選用流程(
1∕2
)
伺服機構的確認
(含減速比)
製作運轉曲線(速度曲線)
計算回轉速度
計算負載慣量(
GD
L
²
)
計算負載扭力(
T
L
)
選擇伺服馬達
負載慣量
(
GD
L
²
)
是否低於馬達轉子慣量
的
3
~
5
倍
1
、增加減速機構
2
、
降低瞬間負載慣量
(
GD
L
²
)
3
、
更改為容量更大的
馬達
4
、
變更運轉曲線(速度
曲線)
YES
NO
計算加減速扭力(
Ta‧Td
)
加速扭力(
Ta
)
與
負載扭力(
T
L
)
合計在瞬間最大扭
力(
Tmax
)
以下
YES
NO
AC
伺服馬達的選用流程(
2∕2
)
計算實效負載扭力(
Trms
)
實效負載扭力(
Trms
)
在額定扭力(
T
M
)
以下
YES
NO
決定使用馬達
※
機械傳動方式
1
、滾珠螺桿傳動
2
、齒條及小齒輪傳動
應用場合:短距離移動,高精度
齒條
小齒輪
應用場合:較長距離移動
※
機械傳動方式
3
、時規皮帶傳動
時規齒輪
時規皮帶
齒
應用場合:大型搬運及精密機械
4
、鏈條傳動
應用場合:長距離及高速位移
※
機械傳動方式
5
、滾輪送料傳動
送料滾輪直徑
送料滾輪
應用場合:衝床機械定尺寸送料及切割機
6
、台車傳動
※
運動方向
2
、水平運動
1
、旋轉運動
3
、垂直運動
通常應用於分度盤
通常應用於滾珠螺、齒輪、皮帶、鏈條傳動元件
通常應用於機械升降軸、機械手臂上下軸
※
伺服馬達容量計算步驟及公式
Vℓ
速度線
T
P
T
L
Ts
t
a
t
c
t
d
t
m
t
cy
扭力線
1
、繪製速度曲線圖
※
伺服馬達容量計算步驟及公式
2
、計算回轉速度
A
、
負載端回轉速度(
Nℓ
)
Nℓ=
依據機械構成而變化
B
、
馬達端回轉速度(
N
M
)
N
M
= Nℓ×R
3
、
計算負載扭力
(
T
L
)
T
L
=
依據機械構成而變化
4
、計算負載慣量
(
J
L
)
J
L
=
依據機械構成而變化
※
伺服馬達容量計算步驟及公式
5
、計算負載運行能量(
P
o
)
P
o
=
60
2π
×N
M
×T
L
6
、計算負載啟動能量(
P
a
)
P
a
=(
×
N
M
)
² ×
60
2π
t
a
J
L
7
、選定伺服馬達條件
◎
負載扭力
(
T
L
)
<
馬達額定扭力
◎
P
a
+
P
o
=
1.5
~
2
倍馬達額定輸出功率
◎
N
M
≦
馬達最大轉速
◎
負載慣量(
J
L
)<
3
~
5
倍馬達轉子慣量
※
伺服馬達容量計算步驟及公式
8
、檢查所選定的伺服馬達
A
、
啟動扭力檢查(
T
P
)
T
P
= +
T
L
啟動扭力(
T
P
)<
瞬間最大扭力
B
、
停止扭力檢查(
T
S
)
T
s
= -
T
L
停止扭力(
T
S
)<
瞬間最大扭力
60 ×
t
a
2π
×N
M
×(J
M
+
J
L
)
60 ×t
d
2π
×N
M
×(J
M
+
J
L
)
※
伺服馬達容量計算步驟及公式
C
、
實效扭力檢查(
T
rms
)
T
rms
=
實效扭力(
T
rms
)<
額定扭力
t
cy
T
P
²
×
t
a
+
T
L
²
×
t
c
+
T
s
²
×t
d
√
※
伺服馬達容量計算相關公式
1
、移動量
ℓ
(
m
)
ℓ= ×
V
ℓ
60
t
a
+
2t
c
+
t
d
2
*當
t
a
=
t
d
ℓ= ×
(
t
m
-
t
a
)
V
ℓ
60
2
、馬達軸回轉速度
N
M
(
r/min
)
N
M
=
N
ℓ×R
60 ×(T
PM
-T
L
)
2π
×N
M
×(J
M
+
J
L
)
3
、最小啟動時間
t
am
(
s
)
t
am
=
60 ×(T
PM
+T
L
)
2π
×N
M
×(J
M
+
J
L
)
4
、最小制動時間
t
dm
(
s
)
t
dm
=
※
負載扭力及負載慣量計算公式
1
、回轉體
A
、
負載扭力
T
L
(
N • m
)
T
L
=
R ×η
Tℓ
B
、
負載慣量
J
L
(
㎏
•
㎡
)
實心圓柱
空心圓柱
L(m)
D(m)
L(m)
D
0
(m)
D
1
(m)
(以
馬達軸換算回轉運動部份的慣量
)
減速機入力側的回轉運動部份
=
×ρ ×L ×D
⁴
(
實心圓柱
)
32
π
J
K
=
×ρ ×L ×
(
D
0
⁴
-
D
1
⁴
)
(
空心圓柱
)
32
π
減速機出力側的回轉運動部份
J
L1
=
R
²
J
K
*J
L
= J
K
+
J
L1
1/R
N
ℓ
J
K
= ×M
K
×D
²
8
1
※
負載扭力及負載慣量計算公式
2
、螺桿(水平)
A
、
負載扭力
T
L
(
N • m
)
T
L
=
2π ×R ×η
9.8 ×
μ
×
M
×
P
B
B
、
負載慣量
J
L
(
㎏
•
㎡
)
*J
L
= J
K
+
J
L1
+
J
L2
V
ℓ
M
μ
1/R
P
B
直線運動部份
J
L2
=
M ×
(
)
²
2πR
P
B
C
、
負載軸回轉速度
N
ℓ
(
r/min
)
N
ℓ=
P
B
V
ℓ
※
負載扭力及負載慣量計算公式
2
、螺桿(垂直)
A
、
負載扭力
T
L
(
N • m
)
T
L
=
2π ×R ×η
9.8 ×
(M-M
C
)
×
P
B
B
、
負載慣量
J
L
(
㎏
•
㎡
)
*J
L
= J
K
+
J
L1
+
J
L2
V
ℓ
M
1/R
P
B
直線運動部份
J
L2
=(
M
+
M
C
)
×
(
)
²
2πR
P
B
C
、
負載軸回轉速度
N
ℓ
(
r/min
)
N
ℓ=
P
B
V
ℓ
M
C
※
伺服馬達容量選擇範例
Ex1:
負 載 速 度:
V
ℓ
=10 m/min
伺服馬達
聯軸器
直線運動機構
滾珠螺桿
直線運動機構質量:
M
=200 ㎏
滾 珠 螺 桿 長 度:
L
B
=1.4 m
滾 珠 螺 桿 直 徑:
D
B
=0.04 m
滾 珠 螺 桿 導 程:
P
B
=0.01 m
聯 軸 器 質 量:
M
c
=
1
㎏
聯 軸 器 外 徑:
D
c
=0.06 m
動 作 次 數:
n
= 40
次
/min
動 作 距 離:
ℓ
= 0.15 m
動 作 時 間:
t
m
= 1.0 s
以下
摩 擦 係 數:
μ
= 0.2
機 械 效 率:
η
= 0.85
(
85﹪
)
1
、速度圖
Vℓ
10
速
度
(
m/min
)
t
a
t
d
t
c
1.0
t
cy
時間(
s
)
t = = = 1.5 ( s )
n
60
□
60
t
a
= t
d
t
a
= t
m
-
= □
- =□(
s
)
Vℓ
60 ×
ℓ
□
60 ×□
t
c
=□
-
t
a
×2 = □
(
s
)
※
伺服馬達容量選擇範例
2
、回轉速度
*
負載端回轉速度
N
ℓ
= = =□ (
r/min
)
P
B
V
ℓ
□
□
*
負載端回轉速度
N
M
=
N
ℓ ×R
(
直結
)
=□ × □=□
(
r/min
)
3
、負載扭力
T
L
=
=
=□ (
N
•m
)
2π ×R ×η
9.8 ×
μ
×
M
×
P
B
2π ×□ ×□
□
×□×□×□
4
、負載慣量
*
馬達軸換算負載慣量
J
L
=
J
B
+
J
C
+
J
L1
=
□
(㎏
•
㎡
)
直線運動部份
J
L1
=
M
×
( )
²
=
□
×
( )
² =
□
(㎏
•
㎡
)
2πR
P
B
螺桿部份
J
B
=
×
ρ
×
L
×
D
⁴
=
×7.87×10
¯
³
×
□
×
(
□
)
⁴
32
π
32
π
=
□
( ㎏
•
㎡
)
2π×
□
□
聯軸器部份
J
C
=
×
M
C
×
D
² =
×
1
×
(
□
)
²
=
□
(㎏
•
㎡)
8
1
8
1
※
伺服馬達容量選擇範例
5
、負載運行能量(
P
o
)
P
o
= =
=
□
(
W
)
60
2π
×
N
M
×
T
L
60
2π
×
□
×
□
6
、負載啟動能量(
P
a
)
P
a
=(
×
N
M
)
² ×
=(
×
□
)
² ×
=
□
(
W
)
60
2π
t
a
J
L
60
2π
□
□
7
、選定伺服馬達條件
◎
負載扭力
(
T
L
)
<
馬達額定扭力
◎
P
a
+
P
o
=
1
~
2
倍馬達額定輸出功率
◎
N
M
≦
馬達最大轉速
◎
負載慣量(
J
L
)<
3
~
5
倍馬達轉子慣量
依條件選定:
□
※
伺服馬達容量選擇範例
選定
馬達規格(
□
)
◎
馬達額定輸出功率=
□
(
W
)
◎
馬達額定轉速=
□
(
rpm
)
◎
馬達額定扭力=
□
(
N
•m
)
◎
瞬間最大扭力=
□
(
N
•m
)
◎
馬達轉子慣量=
□
(㎏
•
㎡
)
8
、檢查所選定的伺服馬達
A
、
啟動扭力檢查(
T
P
)
T
P
= +
T
L
= +
□
≒
□
(
N
•m
)
B
、
停止扭力檢查(
T
S
)
T
s
= -
T
L
≒
□
(
N
•m
)
60 ×
t
a
2π
×N
M
×(J
M
+
J
L
)
60 ×t
d
2π
×N
M
×(J
M
+
J
L
)
60 ×
□
2π
×
□
×
(
□
+
□
)
×
□
※
伺服馬達容量選擇範例
C
、
實效扭力檢查(
T
rms
)
T
rms
=
=
≒
□
(
N
•m
)
t
cy
T
P
²
×
t
a
+
T
L
²
×
t
c
+
T
s
²
×t
d
√
□
(
□
)
²
×
□
+
□
²
×
□
+(
□
)
²
×
□
√
※
外部回生電阻的選定
是由
負載率
,
負載
inertia
,
動作波形
的三個對象
來算出回生電阻之概略值。
1
、依馬達実効負荷率來推定回生容量。
P
=(
π
×T
C
×N
M
×P
f
²
×
η
)
÷
(
2
×60 ×β
)
β
=
T
P
÷T
C
∵T
a
=
T
p
=
β×T
c
2
、依負載慣量來推定回生容量
T
a
=(
(
2π
×N
M
×
(
J
M
+
J
L
)
)
÷
(
60×T
a
))+
T
L
T
d
=(
(
2π
×N
M
×
(
J
M
+
J
L
)
)
÷
(
60×T
a
))-
T
L
P
f
=
T
rms
÷T
C
E
R
=(
1÷2
)
×
(
J
M
+
J
L
)
×
(
2π
×N
M
÷60
)
²
E
C
=(
1÷2
)
×C×
(
V
S
²
-(√
2
×V
C
)
²
)
E
=
E
R
×η
-
E
C
P
=
E÷t
cy
3
、依動作波形來推定回生容量
P
f
=
T
rms
÷T
C
E
b
=(
1÷2
)
×
2π
×N
M
×T
L
÷60×T
d
E
C
=(
1÷2
)
×C×
(
V
S
²
-(√
2
×V
C
)
²
)
E
=
E
R
×η
-
E
C
P
=
E÷t
cy
※
外部回生電阻的選定
4
、求出回生阻抗值
R
MIN
=V
S
÷
I
N
M
’
=
√(
N
M
²
-(
60÷
2π
)
²
×2×E
C
÷
(
J×η
))
P
MAX
=
2π
×N
M
’
×T
d
÷60×η
R
MAX
=
V
S
²
÷P
MAX
V
S
=□
V
--->
HO
V
S
=□
V
--->
EO
I
P
=□
A
--->
HO
I
P
=□
A
--->
EO
※
安裝方式外部配線
電源與馬達連接圖
※
位置命令接線方式
PLC
24V
P
GND
DG 48
PP 14
PN 15
A.
PLC
+24V 45
P
GND
DG 48
PP 14
PN 15
B.
(外部電源)
HO
HO
Controller
GND
DG 48
DG 48
HO1
HO2
所有的控制線以並連方式接到兩台驅動器上,
且
DG
一定要串接。
Controller
IN
PA
PA
Line Driver
轉
TTL
準位
(此方式較好)
HO
A.
Controller
IN
PA
PA
HO
B.
DG
GND
2K
※
安裝方式外部配線
安裝方向以及間隔
※CN1
及
CN2
端子說明
※
參數說明及調整
NO
名 稱
0
控制模式
1
類比輸出顯示
2
正轉/反轉
切換方式
3
編碼器信號
(
輸出分頻
)
4
速度到達判定
5
動態剎車
6
驅動禁止時動作
7
CCW
內部扭矩限制值
NO
名 稱
8
CW
內部扭矩限制值
9
回生電阻保護
level
10
JOG
運轉
11
零速度輸出/
brake
輸出切換
12
扭矩指令
filter
時常數
13
外部扭矩指令
scaling
14
外部扭矩指令
輸入
offset
NO
名 稱
15
Brake sequence
時間
16
驅動器識別碼
17
零速度檢出時動作
18
加減速限制
19
速度
smoothing
filter
時間常數
20
直線加減速時常數
※
參數說明及調整
NO
名稱
28
29
30
31
電子齒輪比
32
33
定位完了範圍
34
35
36
37
CCW
最大積存
脈衝數
CW
最大積存
脈衝數
38
位置比例增益
40
NO
名稱
39
前饋增益
位置
smoothing
時間常數
41
42
43
內部速度限制
1
內部速度限制
2
內部速度限制
3
44
45
46
內部速度指令
1
內部速度指令
2
內部速度指令
3
NO
名 稱
21
電子溫度偵測
LEVEL
22
速度比例增益
23
速度積分時間常數
24
零速度判定
25
外部速度指令
輸入比例值
26
外部速度指令
輸入
offset
27
位置指令輸入脈衝型式
※
故障排除
Alarm code
輸出
alarm
名稱
alarm
動作內容
0
正常
1
主迴路電壓不足
電源電壓在低於規格電壓以下時動作
2
回生異常
回生電阻的負載過大或回生迴路異常時動作
3
過負載
馬達及驅動器的過負載狀態時動作
4
IPM
異常
主迴路用功率轉換模組檢出異常
5
編碼器異常
(ABZ)
檢出編碼器及編碼器電纜線異常而動作
6
溫度異常
(Over heat)
檢出系統溫度高於規格值
7
保留
8
記憶體異常
檢出
CPU
內部的記憶體異常而動作
※
故障排除
Alarm code
輸出
alarm
名稱
alarm
動作內容
9
緊急停止
緊急停止信號被輸入時動作
10
保留
11
位置偏差過大
位置偏差脈波計數器在超過設定容許值以上時動作
12
過速度
馬達轉速超過容許轉數時動作
13
CPU
異常
檢出
CPU
異常而動作
14
驅動禁止異常
CCW/CW
的兩者之驅動禁止信號同時輸入時動作
15
廠商用
※
故障排除
雜訊對策:
*
將動力線(電源線、馬達線等的強電迴路)
與信號線相距
30
公分以上來配線,不要在同
一配線管(
duct
)
配線。
*
信號線編碼器輸入線請使用雙絞對線
(
含隔離
)
,配線的長度,指令輸入線為
3
公尺,編碼器
輸入線
20
尺以內為宜。
*
接地請以使用第
3
種接地(接地電阻值為
100Ω
以下)為宜,而且必須單點接地
*輸入電源外接雜訊濾波器
驅動器
R
S
FG
AC
輸入
濾波器
※
故障排除
*
在信號線上連接電容(但會降低響應頻率)
PLC
24V
P
GND
DG 48
PP 14
PN 15
(外部電源)
HO
2K
104
or
103
PLC
24V
P
GND
DG 48
PP 14
PN 15
(外部電源)
HO
2K
EG 44
*
將
DG
與
EG
連接(若外部電源異常時,
Encoder
會有損壞的危險)
※
符號對照表
Nℓ
1/R
NM
Tℓ
T
L
Vℓ
μ
P
B
M
η
T
pm
負載軸回轉速度
減速比
馬達回轉速度
→
Nℓ×R
負載軸換算後的負載扭力
馬達扭力
→
Tℓ×
(
1÷R
)
負載的速度
摩擦係數
導螺桿導程
直線運動部份的質量
機械效率
伺服馬達的最大扭力
(r/min)
(r/min)
(N • m)
(N • m)
(m/min)
(m)
(㎏)
(N • m)
轉子慣量
負載慣量
慣量比
定格轉矩
使用最大轉矩
使用最大回轉数
加速轉矩
減速轉矩
運行轉矩
加速時間
減速時間
運行時間
動作週期
馬達実効負荷率
※
回生符號對照表
J
M
J
L
J
L
∕J
M
T
M
T
P
∕T
S
N
M
T
P
T
S
T
L
t
a
t
d
t
c
t
cy
P
f
[kgm
2
]
[kgm
2
]
[
倍
]
[Nm]
[
倍
]
[1/min]
[Nm]
[Nm]
[Nm]
[sec]
[sec]
[sec]
[sec]
(0
~
1)
※
回生符號對照表
回生放電晶體最大電流
使用驅動器的電容容量
驅動器入力電圧
馬達驅動器効率
回生電圧
回轉・減速能量
電容充電能量
回生能量
回生開始時回轉数
回生開始時電力
外部回生抵抗選定値
必要回生容量
最大阻抗値
最小阻抗値
最大実効電流
最小実効電流
最長阻抗
ON
時間
最短阻抗
ON
時間
[A]
[F]
[V
AC
]
(0
~
1)
[V]
[J]
[J]
[J]
[1/min]
[W]
[W]
[Ω]
[Ω]
[Arms]
[Arms]
[
msec
]
[
msec
]
I
P
C
V
C
η
V
S
E
R
E
C
E
N
M
’
P
MAX
P
R
MAX
R
MIN
I
RMAX
I
RMIN
t
RMAX
t
RMIN
※
單位換算對照
1gf
• cm
• S² =
0.980665×10
¯
⁴
kg
•
㎡
1kgf
=
9.80665
N
1kgf •
㎡=
9.80665
N • m
GD
² =4×g×J(kg
•
㎡
)
g=9.8(
m
• S²
)