

- 290.00 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
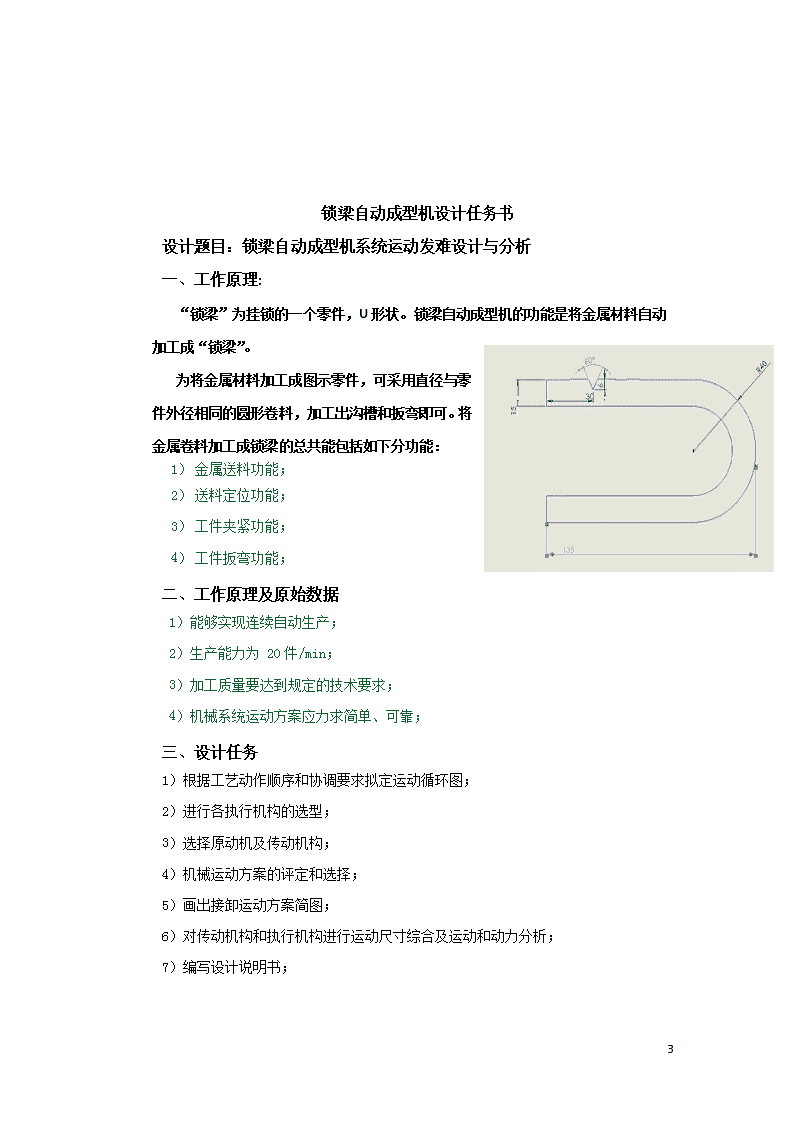
沈阳农业大学Shenyangnongyedaxue课程设计课程名称:锁梁自动成型机系统运动方案设计与分析学院:科学技术学院专业:机械设计制造姓名:****学号:年级:08机制6班任课教师:****17\n20010年12月21日锁梁自动成型机机构设计目录设计任务书……………………………………………………1一、总功能分解………………………………………………2二、执行机构的选择与比较………………………………………………三、原动机的选择………………………………………………四、传动机构的选择与比较…………………………………………………五、机械系统运动简图……………………………………………六、机械系统运动循环图……………………………………………七、锁梁自动成型机机构设计………………………………………………主要参考文献……………………………………………………………………………17\n锁梁自动成型机设计任务书设计题目:锁梁自动成型机系统运动发难设计与分析一、工作原理:“锁梁”为挂锁的一个零件,U形状。锁梁自动成型机的功能是将金属材料自动加工成“锁梁”。为将金属材料加工成图示零件,可采用直径与零件外径相同的圆形卷料,加工出沟槽和扳弯即可。将金属卷料加工成锁梁的总共能包括如下分功能:1)金属送料功能;2)送料定位功能;3)工件夹紧功能;4)工件扳弯功能;二、工作原理及原始数据1)能够实现连续自动生产;2)生产能力为20件/min;3)加工质量要达到规定的技术要求;4)机械系统运动方案应力求简单、可靠;三、设计任务1)根据工艺动作顺序和协调要求拟定运动循环图;2)进行各执行机构的选型;3)选择原动机及传动机构;4)机械运动方案的评定和选择;5)画出接卸运动方案简图;6)对传动机构和执行机构进行运动尺寸综合及运动和动力分析;7)编写设计说明书;17\n一、总功能分解为了实现将金属材料加工成锁梁的总功能,可将总功能分解为如下分功能:1,送料功能2,送料定位功能3,工件夹紧功能4,工件搬弯功能功能元功能元解(匹配机构)123减速1带传动齿轮传动蜗杆传动减速2带传动齿轮传动蜗杆传动减速3带传动齿轮传动蜗杆传动送料夹持器间歇往复移动凸轮机构连杆机构凸轮+连杆机构定位杆的间歇往复移动凸轮机构连杆机构凸轮+连杆机构固定机构的间歇往复移动凸轮机构连杆机构凸轮+连杆机构17\n搬弯滚子支架的间歇往复回转运动凸轮机构齿轮摆杆机构凸轮机构+连杆机构+链传动机构二、执行机构的选择与比较171送料定位机构的选择与比较方案一:用一自锁式夹持器作间歇往复直线运动实现送料。如图4.1所示,夹持器由机构件4-5-5’组成,夹持器由凸轮机构1通过摆动导杆2驱动作间歇往复直线运动,当夹持器向左运动时,由推爪5和5’在卷料7上打滑,从而实现单向送料。图4.117方案二:机构4的送料方式和方案一一样,夹持器是由原动件1的转动,带动摆杆2左右摆动。从而实现了机构4将料517\n送到位后即返回。17通过方案一和方案二的比较,都实现了单向送料。可方案一与方案二相比。方案一可以再送完料以后能有间歇运动。而方案二没有间歇运动。选择方案一更为好。17图4.2172切槽夹紧机构选择与比较方案一:从图4.3可知,滚轮3在凸轮2的旋转上下移动,从而滚轮3带动杆4上下移动。5是回位弹簧。6是‘V’型块,有定位和夹紧工能为一体。图4.31717\n方案二:原理如图4.4,定位和夹紧分开。块6是定位块,由凸轮和连杆组合上下移动实现定位。‘V’型块4的上下移动实现夹紧。图4.4通过方案一和方案二的比较,方案一的定位和夹紧为一体,更为简单,用的机构少,经济节约。同时又能够满足定位和夹紧需要。3搬弯机构的选择与比较方案一:通过杆1的旋转使得杆3的摆动,从而由杆4传动到圆轮5的旋转。从而带动搬弯装置进行搬弯。17\n图4.517方案二:原动件5的摆动让轮1的旋转,从而带动搬弯机构进行搬弯。图4.17\n方案二的摆动易容有卡死的现象,方案一就可有效避免这样的现象。从两种方案中选择方案二比较优秀。三、原动机构的选择1原动机的选择根据设计的要求可知,锁梁一般是大批量生产;从能源方面看,工厂的电源能有效地保证并充足,且有降低生产成本,便于操作,工件可靠,维修方便,应尽量选用电力驱动。从对环境影响来看,电力驱动方式所产生的污染较小,可选择电动机。从经济方面来看,电动机应满足一定的功率,防止功率过大造成浪费,过小负荷过大,使生产率达不到要求致使浪费时间。所以为了满足上诉要求,选择电压为380V转速900转/分的交流电动机最为合适。四、传动机构的选择1传动机构的选择与比较机械系统中的传动机构是把原动机输出的机械能传递给执行机构并实现能量的分配、转速的改变及运动形式的改变的中间装置。常用的传动机构有齿轮传动、带传动、链传动、螺旋传动、蜗杆传动等。他们的各自有的特点如下:特点功率(KW)效率寿命应用17\n齿轮传动承载能力和速度范围大;传动比恒定,采用卫星传动可获得很大传动比,外廓尺寸小,工作可靠,效率高。制造和安装精度要求高,精度低时,运转有噪音;无过载保护作用圆柱直齿轮750圆柱直齿轮0.95~0.98取决于齿轮材料的接触和弯曲疲劳强度以及抗胶合与抗磨损能力金属切削机床、汽车、起重运输机械、冶金矿山机械以及仪器等带传动轴间距范围大,工作平稳,噪音小,能缓和冲击,吸收振动;摩擦型带传动有过载保护作用;结构简单,成本低,安装要求不高;外廓尺寸较大;摩擦型带有滑动,不能用于分度链;由于带的摩擦起电,不宜用于易燃易爆的地方;轴和轴承上的作用力很大,带的寿命较短普通V带500窄型V带750平带3500V型带0.90~0.94平带0.94~0.98带轮直径大,带的寿命长。普通V带3500-5000h金属切削机床、锻压机床、输送机、通风机、农业机械和纺织机械链传动轴间距范围在,传动比恒定;链条组成件的油膜能吸振,对恶劣环境适应能力强,工作可靠高速时没有带传动平稳,容易引起共振需设张紧和减振装置。最在3500一般小于100速度小于等10m/s时0.95~0.97速度大于10m/s时0.92~0.96与制造质量有关5000-15000h农业机械、石油机械、矿山机械、运输机械和起重机械等最在750单头0.7~0.75双头17\n蜗杆传动结构紧凑,单级传动能得到很大的传动比;传动平稳,无噪音;可制成自锁机构;传动比大、滑动速度低时效率低;中、高速传动需用昂贵的减磨材料;制造精度要求高,刀具费用贵通常只用到500.75~0.82制造精确,润滑良好,寿命较长;低速传动,磨损显著金属切削机床(特别是分度机构)、起重机、冶金矿山机械、焊接转胎等通过上几种传动装置的比较可得,减速的优先选择带传动、齿轮传动,他们的要求的传动功率不大,在满足工作的性能情况下,选用这种结构简单的传动装置,可以降低成本,节约能源。在搬弯时由于精确度要求高应选用链传动。17\n五、机械系统运动简图1机械运动简图图8.1表示了搬弯机构的运动简图,电机1通过传动系统带动主轴2的旋转。通过主轴的旋转带动凸轮,从面使摆杆3摆动实现送料块5将料6送到位置。主轴的旋转带动凸轮使连杆8带动V型块7上下移动实现定们切断切槽及夹紧。主轴的旋转带动齿轮通过杆9的转动让11摆动,从而使圆13转动,由链传动使轮14进行搬弯。设计轮15和轮13的传动比为2.图8.117\n六、机械系统运动循环图1根据工艺动作顺序和协调要求拟定运动循环图送料定位夹紧搬弯0º90º180º270º360º执行构件动作时间分配轴转角送料杆送料行程工作位置停歇空回行程初始位置停歇T1=1/3T2=0T3=1/3T4=1/3Φ1=120°Φ2=0°Φ3=120°Φ4=120°定位夹紧定位行程工作位置停歇空回行程初始位置停歇T1=1/12T2=2/3T3=3/12T4=0Φ1=30°Φ2=240°Φ3=90°Φ4=0°搬弯搬弯行程工作位置的停歇空回行程初始位置停歇T1=1/3T2=0T3=1/3T4=1/3Φ1=120°Φ2=0°Φ3=120°Φ4=120°17\n七、机构的设计1电机向主轴传动设计与分析17根据生产率20件/分可知,主轴的转速为20r/min。从而可以算得传动比i=900/20,从而设计三级减速,如图(图7.1)一级减1/3,第二级减1/3,第三级减1/5;从1到2是带传动,设计d1=100d2=300;z2’=18d2’=mz=72;z3=54d3=mz=216;z3’=18d3’=mz=72;z4=90,d4=mz=360图7.1172送料机构设计与分析如图(图7.2)送料机构的送料过程是由圆柱凸轮1的旋转带动杆2左右摆动来实现送料。弦长AB就是凸轮1的摆线长。由于送料DE的长为270mm,取比利为1:10则AB的长为27mm,取CD长为540mm,则有AC为54mm.根据几何关系可得AB到DE距离510mm17\n图7.23定位夹紧机构的设计与分析17定位夹紧为一体的机构如图(图7.3)从侧示图可看出,当凸轮1旋转,通过连杆带动V型块上下移动。从而实现定位和夹紧。最高的高度如图所示H=405图7.317\n4搬弯机构的设计与分析17用一搬弯滚子将工件压在一圆弧模块上,然后绕圆弧模块转一角度,即可将工件搬成与圆弧模块半径相对应的弧型,其搬弯原理如图(图7.4)图7.4从图7.5中,设计杆1长70mm杆3长300mm,杆4长200mm17\n主要参考文献1.《机械原理》主编魏文军高英武张云文中国农业大学出版社2.《机械原理课程设计手册》主编邹慧君张青高等教育出版社3.《机械原理课程设计指导书》 贵州大学机械工程学院 4《机械创新设计》主编黄纯颖高等教育出版社5《机械原理学习指南》主编陈作模西北工业大学机械原理17