

- 228.58 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
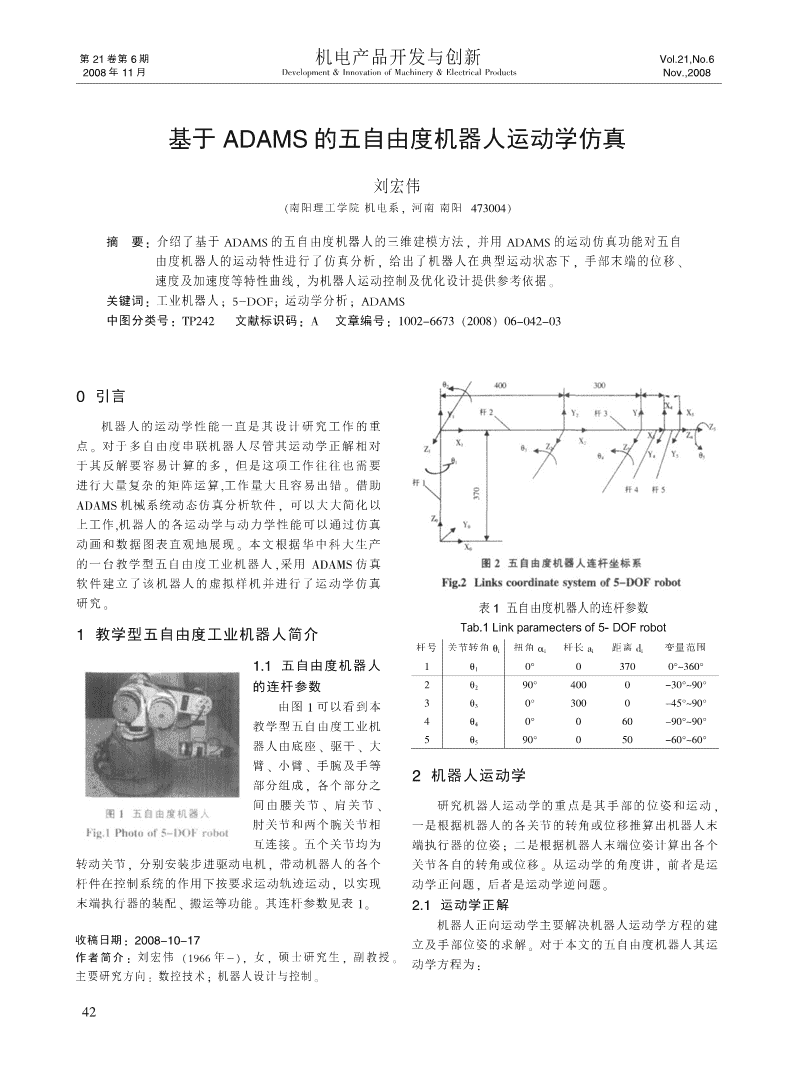
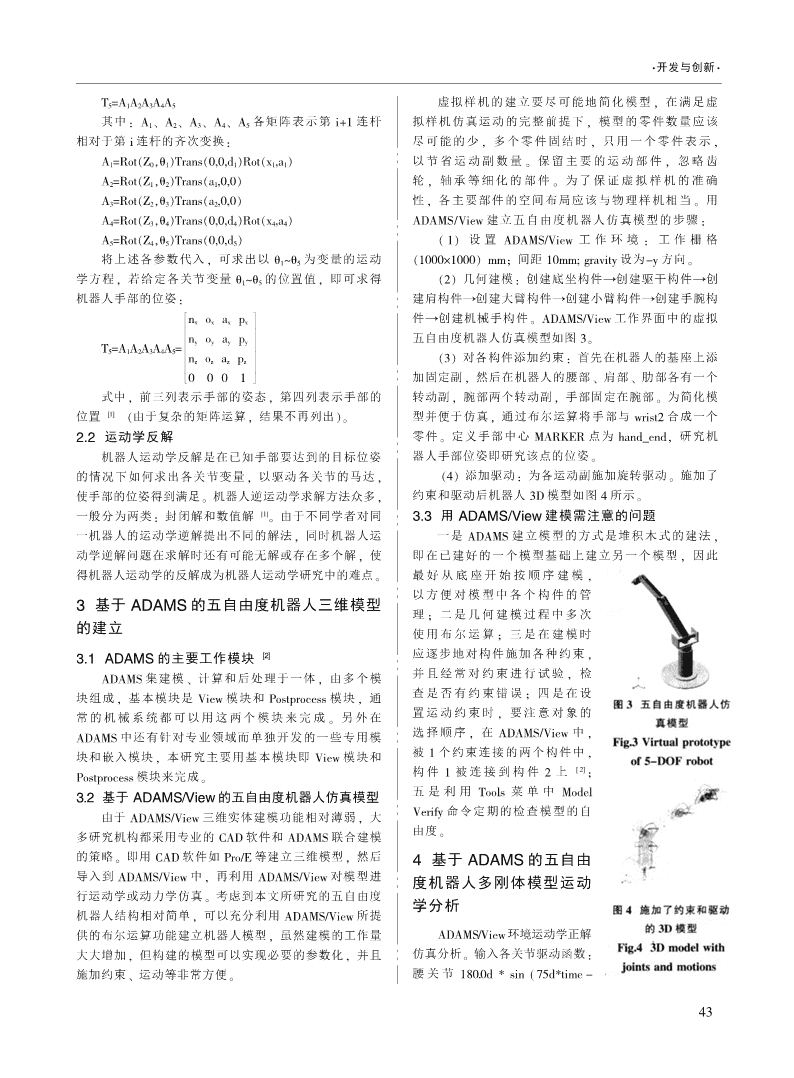
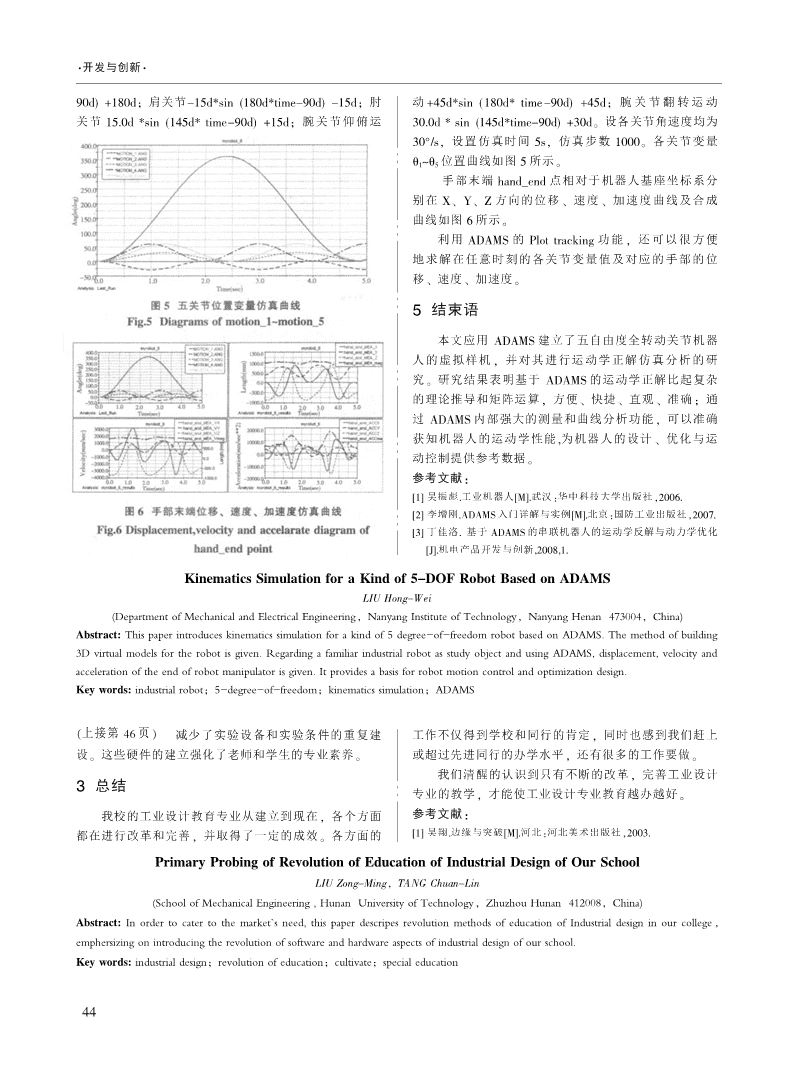
第21卷第6期机电产品开发与创新Vol.21,No.6·200开发与创新8年11月·Development&InnovationofMachinery&ElectricalProductsNov.,2008基于ADAMS的五自由度机器人运动学仿真刘宏伟(南阳理工学院机电系,河南南阳473004)摘要:介绍了基于ADAMS的五自由度机器人的三维建模方法,并用ADAMS的运动仿真功能对五自由度机器人的运动特性进行了仿真分析,给出了机器人在典型运动状态下,手部末端的位移、速度及加速度等特性曲线,为机器人运动控制及优化设计提供参考依据。关键词:工业机器人;5-DOF;运动学分析;ADAMS中图分类号:TP242文献标识码:A文章编号:1002-6673(2008)06-042-030引言机器人的运动学性能一直是其设计研究工作的重点。对于多自由度串联机器人尽管其运动学正解相对于其反解要容易计算的多,但是这项工作往往也需要进行大量复杂的矩阵运算,工作量大且容易出错。借助ADAMS机械系统动态仿真分析软件,可以大大简化以上工作,机器人的各运动学与动力学性能可以通过仿真动画和数据图表直观地展现。本文根据华中科大生产的一台教学型五自由度工业机器人,采用ADAMS仿真软件建立了该机器人的虚拟样机并进行了运动学仿真研究。表1五自由度机器人的连杆参数Tab.1Linkparamectersof5-DOFrobot1教学型五自由度工业机器人简介杆号关节转角θi扭角αi杆长ai距离di变量范围1.1五自由度机器人1θ10°03700°~360°的连杆参数2θ290°4000-30°~90°由图1可以看到本3θ30°3000-45°~90°4θ40°060-90°~90°教学型五自由度工业机5θ590°050-60°~60°器人由底座、驱干、大臂、小臂、手腕及手等2机器人运动学部分组成,各个部分之间由腰关节、肩关节、研究机器人运动学的重点是其手部的位姿和运动,肘关节和两个腕关节相一是根据机器人的各关节的转角或位移推算出机器人末互连接。五个关节均为端执行器的位姿;二是根据机器人末端位姿计算出各个转动关节,分别安装步进驱动电机,带动机器人的各个关节各自的转角或位移。从运动学的角度讲,前者是运杆件在控制系统的作用下按要求运动轨迹运动,以实现动学正问题,后者是运动学逆问题。末端执行器的装配、搬运等功能。其连杆参数见表1。2.1运动学正解机器人正向运动学主要解决机器人运动学方程的建收稿日期:2008-10-17立及手部位姿的求解。对于本文的五自由度机器人其运作者简介:刘宏伟(1966年-),女,硕士研究生,副教授。动学方程为:主要研究方向:数控技术;机器人设计与控制。42\n·开发与创新·T5=A1A2A3A4A5虚拟样机的建立要尽可能地简化模型,在满足虚其中:A1、A2、A3、A4、A5各矩阵表示第i+1连杆拟样机仿真运动的完整前提下,模型的零件数量应该相对于第i连杆的齐次变换:尽可能的少,多个零件固结时,只用一个零件表示,A1=Rot(Z0,θ1)Trans(0,0,d1)Rot(x1,a1)以节省运动副数量。保留主要的运动部件,忽略齿A2=Rot(Z1,θ2)Trans(a1,0,0)轮,轴承等细化的部件。为了保证虚拟样机的准确A3=Rot(Z2,θ3)Trans(a2,0,0)性,各主要部件的空间布局应该与物理样机相当。用A4=Rot(Z3,θ4)Trans(0,0,d4)Rot(x4,a4)ADAMS/View建立五自由度机器人仿真模型的步骤:A5=Rot(Z4,θ5)Trans(0,0,d5)(1)设置ADAMS/View工作环境:工作栅格将上述各参数代入,可求出以θ1~θ5为变量的运动(1000×1000)mm;间距10mm;gravity设为-y方向。学方程,若给定各关节变量θ1~θ5的位置值,即可求得(2)几何建模:创建底坐构件→创建驱干构件→创机器人手部的位姿:建肩构件→创建大臂构件→创建小臂构件→创建手腕构0oap0件→创建机械手构件。ADAMS/View工作界面中的虚拟0nxxxx000000nyoyaypy0五自由度机器人仿真模型如图3。00T5=A1A2A3A4A5=00000nzozazpz0(3)对各构件添加约束:首先在机器人的基座上添0000000010加固定副,然后在机器人的腰部、肩部、肋部各有一个00式中,前三列表示手部的姿态,第四列表示手部的转动副,腕部两个转动副,手部固定在腕部。为简化模位置[1](由于复杂的矩阵运算,结果不再列出)。型并便于仿真,通过布尔运算将手部与wrist2合成一个2.2运动学反解零件。定义手部中心MARKER点为hand_end,研究机机器人运动学反解是在已知手部要达到的目标位姿器人手部位姿即研究该点的位姿。的情况下如何求出各关节变量,以驱动各关节的马达,(4)添加驱动:为各运动副施加旋转驱动。施加了使手部的位姿得到满足。机器人逆运动学求解方法众多,约束和驱动后机器人3D模型如图4所示。一般分为两类:封闭解和数值解[1]。由于不同学者对同3.3用ADAMS/View建模需注意的问题一机器人的运动学逆解提出不同的解法,同时机器人运一是ADAMS建立模型的方式是堆积木式的建法,动学逆解问题在求解时还有可能无解或存在多个解,使即在已建好的一个模型基础上建立另一个模型,因此得机器人运动学的反解成为机器人运动学研究中的难点。最好从底座开始按顺序建模,以方便对模型中各个构件的管3基于ADAMS的五自由度机器人三维模型理;二是几何建模过程中多次的建立使用布尔运算;三是在建模时3.1ADAMS的主要工作模块[2]应逐步地对构件施加各种约束,并且经常对约束进行试验,检ADAMS集建模、计算和后处理于一体,由多个模查是否有约束错误;四是在设块组成,基本模块是View模块和Postprocess模块,通置运动约束时,要注意对象的常的机械系统都可以用这两个模块来完成。另外在选择顺序,在ADAMS/View中,ADAMS中还有针对专业领域而单独开发的一些专用模被1个约束连接的两个构件中,块和嵌入模块,本研究主要用基本模块即View模块和构件1被连接到构件2上[2];Postprocess模块来完成。五是利用Tools菜单中Model3.2基于ADAMS/View的五自由度机器人仿真模型Verify命令定期的检查模型的自由于ADAMS/View三维实体建模功能相对薄弱,大由度。多研究机构都采用专业的CAD软件和ADAMS联合建模的策略。即用CAD软件如Pro/E等建立三维模型,然后4基于ADAMS的五自由导入到ADAMS/View中,再利用ADAMS/View对模型进度机器人多刚体模型运动行运动学或动力学仿真。考虑到本文所研究的五自由度学分析机器人结构相对简单,可以充分利用ADAMS/View所提供的布尔运算功能建立机器人模型,虽然建模的工作量ADAMS/View环境运动学正解大大增加,但构建的模型可以实现必要的参数化,并且仿真分析。输入各关节驱动函数:施加约束、运动等非常方便。腰关节180.0d*sin(75d*time-43\n·开发与创新·90d)+180d;肩关节-15d*sin(180d*time-90d)-15d;肘动+45d*sin(180d*time-90d)+45d;腕关节翻转运动关节15.0d*sin(145d*time-90d)+15d;腕关节仰俯运30.0d*sin(145d*time-90d)+30d。设各关节角速度均为30°/s,设置仿真时间5s,仿真步数1000。各关节变量θ1~θ5位置曲线如图5所示。手部末端hand_end点相对于机器人基座坐标系分别在X、Y、Z方向的位移、速度、加速度曲线及合成曲线如图6所示。利用ADAMS的Plottracking功能,还可以很方便地求解在任意时刻的各关节变量值及对应的手部的位移、速度、加速度。5结束语本文应用ADAMS建立了五自由度全转动关节机器人的虚拟样机,并对其进行运动学正解仿真分析的研究。研究结果表明基于ADAMS的运动学正解比起复杂的理论推导和矩阵运算,方便、快捷、直观、准确;通过ADAMS内部强大的测量和曲线分析功能,可以准确获知机器人的运动学性能,为机器人的设计、优化与运动控制提供参考数据。参考文献:[1]吴振彪.工业机器人[M].武汉:华中科技大学出版社,2006.图6手部末端位移、速度、加速度仿真曲线[2]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2007.Fig.6Displacement,velocityandaccelaratediagramof[3]丁佳洛.基于ADAMS的串联机器人的运动学反解与动力学优化hand_endpoint[J].机电产品开发与创新,2008,1.KinematicsSimulationforaKindof5-DOFRobotBasedonADAMSLIUHong-Wei(DepartmentofMechanicalandElectricalEngineering,NanyangInstituteofTechnology,NanyangHenan473004,China)Abstract:Thispaperintroduceskinematicssimulationforakindof5degree-of-freedomrobotbasedonADAMS.Themethodofbuilding3Dvirtualmodelsfortherobotisgiven.RegardingafamiliarindustrialrobotasstudyobjectandusingADAMS,displacement,velocityandaccelerationoftheendofrobotmanipulatorisgiven.Itprovidesabasisforrobotmotioncontrolandoptimizationdesign.Keywords:industrialrobot;5-degree-of-freedom;kinematicssimulation;ADAMS(上接第46页)减少了实验设备和实验条件的重复建工作不仅得到学校和同行的肯定,同时也感到我们赶上设。这些硬件的建立强化了老师和学生的专业素养。或超过先进同行的办学水平,还有很多的工作要做。我们清醒的认识到只有不断的改革,完善工业设计3总结专业的教学,才能使工业设计专业教育越办越好。我校的工业设计教育专业从建立到现在,各个方面参考文献:都在进行改革和完善,并取得了一定的成效。各方面的[1]吴翔.边缘与突破[M].河北:河北美术出版社,2003.PrimaryProbingofRevolutionofEducationofIndustrialDesignofOurSchoolLIUZong-Ming,TANGChuan-Lin(SchoolofMechanicalEngineering,HunanUniversityofTechnology,ZhuzhouHunan412008,China)Abstract:Inordertocatertothemarket`sneed,thispaperdescripesrevolutionmethodsofeducationofIndustrialdesigninourcollege,emphersizingonintroducingtherevolutionofsoftwareandhardwareaspectsofindustrialdesignofourschool.Keywords:industrialdesign;revolutionofeducation;cultivate;specialeducation44