

- 772.00 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
电气传动自动控制系统专业:自动化学生:指导老师:摘要:综述了一种在给定系统设备的情况下,设计并调试双闭环直流调速系统使其满足要求的性能指标的工程方法。主要包括原始设备参数的测量、系统模型的建立及简化处理、调节器的设计与仿真、系统的综合调试。关键词:双闭环直流调速系统、控制系统模型、调节器的设计与仿真Abstract:AnoverviewofaspecificengineeringmethodtodesignandsetdoubleclosedloopDCspeedregulatingsystemtomeetrequiredperformanceindexwithgivensystemequipment.Mainlyincludesmeasuregivenequipment,buildandsimplifymathematicmodels,designandsimulatecontrollers,systematicintegratedsetting.Keywords:doubleclosedloopDCspeedregulatingsystem,systemmodels,designandsimulatecontrollers目录电气传动自动控制系统2一、设计任务31.1、性能指标31.2、已知条件41.3、待测参数41.4、设备清单41.5、系统结构图5二、系统建模52.1、电枢内阻与电感电阻的测量52.2、电势转速系数的测量6\n2.3、电枢回路电磁时间常数的测量62.4、机电时间常数的测量62.5、电源的传递特性72.6、电机的建模9三、系统设计93.1、电流调节器的设计103.2、转速调节器的设计113.3、Matlab仿真11四、系统调试114.1、单元调试114.2、系统调试124.2.1、电流环整定:124.2.2、转速环整定:124.3、系统性能测定:134.3.1、动态性能134.3.2、静态性能13五、系统评估145.1、系统实际性能评价145.3、实验中出现的一些问题15六、结束语15一、设计任务1.1、性能指标在给定的实验装置上,设计并调试一个双闭环直流调速系统使被控电机的转速能迅速跟随设定值,要求其满足下列性能指标:静差率:s%≤5%调速范围:D=3
电流超调量:%≤5%转速超调量:%≤10%\n1.2、已知条件最大速度给定=5V
最大电流给定=5V
最大电枢电流=1.4A
电流反馈强度β=5V/1.4A
速度反馈强度α=5V/1450rpm
调节器输入电阻=20KΩW
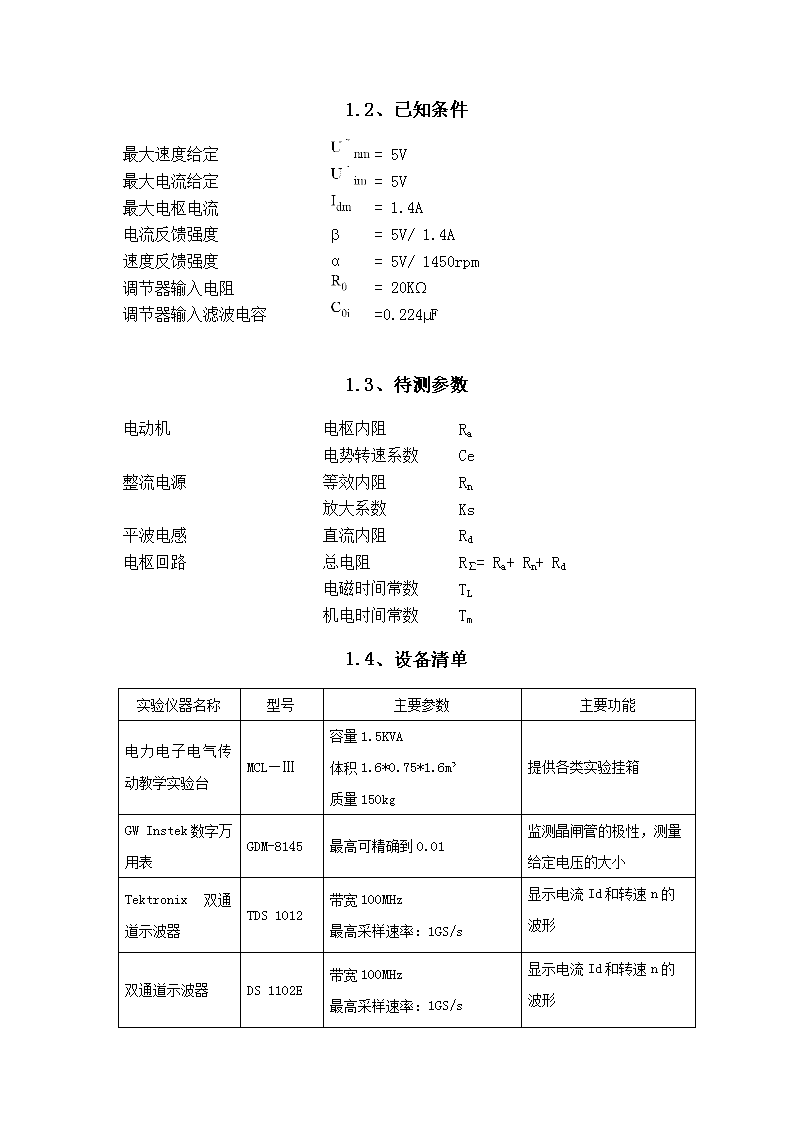
调节器输入滤波电容=0.224μF1.3、待测参数电动机电枢内阻Ra电势转速系数Ce整流电源等效内阻Rn放大系数Ks平波电感直流内阻Rd电枢回路总电阻R∑=Ra+Rn+Rd电磁时间常数TL机电时间常数Tm1.4、设备清单实验仪器名称型号主要参数主要功能电力电子电气传动教学实验台MCL—Ⅲ容量1.5KVA体积1.6*0.75*1.6m³质量150kg提供各类实验挂箱GWInstek数字万用表GDM-8145最高可精确到0.01监测晶闸管的极性,测量给定电压的大小Tektronix双通道示波器TDS1012带宽100MHz最高采样速率:1GS/s显示电流Id和转速n的波形双通道示波器DS1102E带宽100MHz最高采样速率:1GS/s显示电流Id和转速n的波形\n电感、电容表DM6243LCMETER直接测量电感、电容值1.5、系统结构图系统主要由转速给定电位器RP1、转速调节器ASR、电流调节器ACR、电力电子变换器UPE、电流互感器、被控直流电机以及转速计组成。其中电位器RP1用于给定期望的电机转速;转速计为转速调节器提供转速负反馈;电流互感器为电流调节器提供电流负反馈。电位器RP1与转速计的输出作为转速调节器的输入,实现转速控制,构成串级系统的外环,保证电机转速在稳态时能达到或接近设定值。转速调节器的输出与电流互感器作为电流调节器的输入构成系统内环,在电机启动或者加速的过程中控制电机电枢电流,使其在动态过程中尽量维持在最大值,以使转速尽快达到或者接近设定值。ASR的输出限幅电压决定ACR的最大给定电压,ACR的输出限幅电压限制了电力电子变换器的最大输出电压防止电枢电流过大烧坏电机绕组。一、系统建模在计算控制器的具体参数之前需要测量系统各个组成环节的参数,并以参数建立对应模型。2.1、电枢内阻与电感电阻的测量在测量电枢内阻时,由于电枢内阻包含了电刷与接触片的接触电阻,而接触电阻与电机转子的转动角度有关,不能简单的测量电枢内阻。测量电枢内阻时就进行n次测量取平均值,且每次测量时电机的转子应沿同一方向转动360/n度,理论上n越大越好,但是n越大所增加的精确度便越小且付出的工作量也就更大,有得不偿失的感觉,本次试验取n=3即可。在测量平波电感电阻时也采用多次测量取平均值的方法来提高测量准确度。测得的电枢内阻与平波电感电阻的数据如下:测量次数123平均值\n电枢内阻(Ω)22.121.622.222.0电感电阻(Ω)12.011.812.212.0在实际的实验操作中我们也曾使用伏安法来测量二者(见原始数据记录),但考虑到电流读数存在估读,准确度不够,便舍弃不用。2.2、电势转速系数的测量对电机的另一项重要参数电势转速系数的测量方法由下公式给出,测量时就让电机空载运行并切除电枢回路中的限流电阻,改变控制电压,可测得两组数据。把没得数据代入上面的公式便可得到电势转速系数。测量数据与计算如下表:测量次数电源电压(V)转速(rpm)1217150021811250计算=(217-181)/(1500-1250)=0.144V/rpm2.3、电枢回路电磁时间常数的测量对电枢回路而言,还有几个重要的参数需要测量,一是电枢电感,二是平波电抗器的电感,三是电机机电时间常数。对前两者测量采用数字电感表直接进行测量,测量时应注意断开回路,对电抗器和电枢绕组单独进行测量。利用电枢电感和平波电抗器的电感可以计算出电枢回路电磁时间常数。计算公式为测量与计算如下:元件名称平波电抗器电枢绕组电感值(H)0.7220.286计算=(0.722+0.286)/(22+12+14)=0.021s2.4、机电时间常数的测量测量机电时间常数时须要准确记录电枢电流的阶跃响应波形,使用数字示波器保存电流波形是不错的选择。记录波形时,应使电机空载运行,突加给定电压时应注意电机启动峰值电流达到系统设定电大电流。记录电流波形时除必须保证电机空载运行之外,还必须\n断开与电枢相串连的限流电阻,否则记录的波形不能得出正确的机电时间常数Tm,因为没有切除限流电阻,会造成电流波形的下降沿被拉长,使得计算出来的S偏大,最后导致计算得出的Tm也偏大。在记录电流的启动波形时,应注意调节示波器中波形的零电平位置,使其与示波器屏幕上的某一条合适的水平栅格线相吻合,栅格线的选取应该让屏幕能显示出全部的电流启动波形为宜。在调整示波器的零电平时,应注意即使在没有加控制电压时,示波器上的波形也不与零电平对齐,与栅格线对齐的应是栅格线外的带有示波器通道号的指示图标的右端顶点。机电时间常数Tm的计算需要对波形进行积分运算,再利用下面的公式计算Tm。用示波器记录的波形如下:上面的右图为计算波形面积的示意,在实际操作时可以借助Photoshop等软件进行计算。先选取并画出一个合适的坐标系,使坐标系的纵轴垂直通过电流波形的顶点,横轴与电流的稳态渐近线重合。对坐标系与电流波形下降沿围成的区域重新着色,并计算新着色区域的像素个数为2155,用Photoshop在波形上测得与两条线之间的垂像素距离为70,同时测得在栅格上一个栅格的边长为25个像素。每一个像素代表0.04V,2ms。设电流互感器的跨电阻为R,则S=(0.04V/R)*2ms*2155=172.4V*ms/R,-=70*0.04=2.8V/R,代入上面的公式可求出Tm=61.6ms=0.0616s。2.5、电源的传递特性需要测量的与电源相关的参数主要有电源内阻Rn和电源放大倍数Ks。\n对电源内阻的测量与电机电势转速系数的测量类似,需要测量两组数据,但是不同的是测量电源内阻时不能改变控制电压并且要保证其在测量过程中不变,而是要改变与电枢串联的限流电阻。测量时应断开电机的励磁绕组与电源的连接,使电枢通电时电机保持静止。一般情况下,由于电机的长时间运行,其定子上会有少许剩磁通,使电机在断开励磁电源的情况下仍然能转动,在这种情况下可以反接励磁电源一段时间消磁。测得的数据可以用公式计算出电源内阻。测量数据与计算如下表:测量次数电源电压(V)电枢电流(A)11970.521901.0计算过程与结果Rn=(197-190)/(1.0-0.5)=14.0Ω在测量电源放大系数的时候应该调节与电枢串连的限流电阻使电枢电流小于1A,测量时应分级调节控制电压,测量多级数据以描绘出电源的输入输出特性曲线,计算电源放大系数时取其线性段进行拟合。测量次数12345678(V)12.005.083.712.952.442.071.771.53(V)316300280260240220200180(A)0.600.590.520.490.440.410.390.32(V)324.4308.26287.28266.86246.16225.74205.46184.48测量次数9101112131415(V)1.331.140.980.820.640.420.20(V)160140120100806040(A)0.290.240.200.180.120.090.05(V)164.06143.36122.80102.5281.6861.2640.7由以上数据绘制的电源输入输出特性曲线图:\n由图可知特性在输出为40.7V到246.16V这一段线性特性相对较好,取这一段进行线性拟合可得到电源的线性放大倍数。为方便word排版,上图对两个坐标轴进行了转置,不难得出Ks=98.04。由于晶闸管的导通延时与失控时间等其他原因,实际的触发电路和整流电路都是非线性的,只能在一定的工作范围内近似看成线性的。在动态过程中,可把该装置看成是一个纯滞后环节。但是纯滞后环节是一个非最小相位系统,若把其当成纯滞后环节则不便于后期处理与计算。通常的做法是对其进行泰勒级数展开,并考虑到Ts很小可忽略其高次项,近似为一阶惯性环节。2.6、电机的建模有了上面的测量与计算就可以对电机进行建模。建模主要分为两个部分,一是对电机电枢回路的建模,即是对电源电压与电枢电流的关系之间的建模。二是对电枢电流与感应电动势关系。把测量的参数代入一般的额定励磁下直流电机的动态结构图可得出电机的动态结构模型。\n一、系统设计在建立了电机的动态模型后,在开始设计系统的调节器之前需要考虑到另一个极为重要的事实。由于电网的扰动等其他原因,电流互感器与转速计输出的电压信号中存在许多多余的扰动信号,需要用滤波器滤除多余的信号。滤波器的存在使得反馈环节不再是单纯的比例环节,而是变成了更复杂的惯性环节。在本次实验装置中,滤波器使用的是一阶滤波器,其对应的传递函数也为一阶惯性环节。系统的动态结构图如下:3.1、电流调节器的设计由上图可以看出,电流环的控制对象是双惯性的,而根据系统的设计指标,应该使校正后的系统成为典型的I型系统,采用PI校正能满足这一要求。电流调节器的传递函数可以写成:待定参数为比例系数,超前时间常数。\n电流调节器的电路如右图,该调节器包含了给定滤波与反馈滤波。为了让调节器的零点与被控对象的大时间常数极点相消,应选择==0.021s。设计要求电流超调量,可选,。又,,可以得出如下的结果:综合以上各式可以得出还需要验证校验是否满足近似条件。以上各式可以说明我们所采取的各种近似处理所带来的误差是可接受的,即我们的近似处理是可行的。3.2、转速调节器的设计在设计好电流调节器后,可以把电流调节器、整流电源以及直流电机当作转速调节器的被控对象,而后者可以近似地看作是一个一阶惯性环节串上一个积分环节。为了实现转速无静差,就必须在负载扰动前加一个积分环节,它应被包含在ASR中。而在振动点后面已有一个积分环节,转速开环传递函数共有两个积分环节,应该设计成典型II型系统。由此可见,ASR也应该采用PI调节器,其电路结构与电流调节器类似。在调节器中,包含了给定和反馈信号的滤波环节,这两个环节可以看成一个一阶惯性环节,并移到调节器的后面,与被控对象的一阶惯性环节合并。运放增益由以下公式计算:\n取h=5,则最后可得出3.3、Matlab仿真结果给定电压为5V,负载电流为0.1A时的转速电流波形分别如下图:给定电压为5V,负载电流为0.7A时的转速电流波形分别如下图:\n一、系统调试4.1、单元调试在整定调节器的参数之前,应该先调节调节器ACR、ASR运放输出的限幅电压。这样可以保证在后面的调试过程以及系统的运行过程中,不会出现因电枢电流过大造成电机烧毁或者电机转速过高的情况。整定调节器ACR、ASR的运放输出限幅值的过程如下:1.将零速封锁器置于“解除”状态;2.按调节器设计参数Rn、Cn、Ri、Ci将ASR、ACR接成PI调节器;3.选择调节器任意有效输入端,分别加入正、负输入任意小大的电压信号;4.测量ASR、ACR的输出信号大小,并适当调节各自的正、负限幅电位器(RP1或RP2),直至输出电压为设定限幅值(ASR为±5V,ACR为±3V),在调试的过程中,应断开电机与电源的连接。4.2、系统调试在单元调试完成后,可以开始系统调试。系统调试可以分成两个部分,一是电流环的调试,二是转速环的调试。应该先调试电流环的参数,使其满足基本的要求,在此这后再进行转速环的调试。4.2.1、电流环整定:1.断开电机励磁电源,电枢回路串联最大电阻450Ω;2.将电流反馈(FBC+FA)输出信号Ui接入ACR输入端(“1”端),给定信号U*i由给定单元加入ACR的另一输入端;在把反馈信号和输入信号连接到调节器的之前,应该检查两者的电压极性是否相反,若反馈电压为正则给定负电压,否则给定正电压。3.ACR输出信号接至移相电路输入端Uct;4.接通主电源,缓慢增加给定U*i至2.5V大小,再将电枢回路串联电阻450Ω逐渐减小为零,监测电枢电流大小,并适当调节电流反馈强度(FBC+FA电位器RP1),使电流达到0.7A;4.2.2、转速环整定:1.将测速装置输出信号接入速度变换器输入端(FBS的“1”“2”端),FBS的输出端分别接至ASR输入端“1”和DZS(零速封锁器)的“2”端;同时DZS的“1”端介入给定信号U*n;2.ASR的输入“2”\n端接给定信号,输出端接ACR任意有效输入端,替代ACR原有的给定信号U*i,在选择给定电压的极性时应该考虑到运放的反相的作用,否则就会把负反馈变为正反馈,使系统一上电就达到最高转速;1.接通电机励磁电源,切除电枢回路串联电阻;2.将零速封锁器置于“封锁”状态;3.加入给定U*n,使电动机空载运转,当U*n=5V时,调节FBS的反馈系数电位器RP,使速度达到指定值1450rpm。可以把转速计看成是一个受电机转速控制的电压源,若系统一上电就达到最高转速且不受给定电压控制时,可以尝试交换转速计输出端两条信号的位置。4.3、系统性能测定:完成上面的步骤后,系统能满足要求的调速范围,并且能保证系统的稳态性能,但是系统的动态性能并不能满足要求,还需要反复的调试并调整CR、ASR的PI参数。4.3.1、动态性能电动机空载时,突加最大给定U*n=5V,观察电枢电流id和转速n的波形,在设计参数基础上调整ACR、ASR的PI参数,使之满足设计要求,记录id、n的波形如右图,ACR、ASR的最终整定PI参数值与超调量如下表:调节器电阻R(K)电容C(uf)超调量ACR15.41.2<5%ASR900.2<10%4.3.2、静态性能在调速范围内,对应Un*=5V和5/3V,分别测量2条电动机静特性曲线(每条特性由空载点到额定负载点不少于6组数据),并计算静差率s%。Un*=5Vn(rpm)147814851486148014801490\nId(A)0.90.80.70.50.40.08Un*=5/3Vn(rpm)445447447446448450Id(A)10.80.60.40.20.02绘制出的特性曲线静差率:s%=(450-445)/450*100%=1.11%一、系统评估5.1、系统实际性能评价经过调试,系统的各项性能指标基本能满足设计要求,但是与理论计算出的结果相差较大,但总算在可以接受的范围内。从波形上可以看出系统无论是在动态过程中,还是进入稳态运行后,其变化趋势与理论计算较为符合,说明理论计算能在一定程度上反应系统的运动变化规律。电流和转速波形都没有理想的那么平滑,有一定的波动。造成这种情况的原因有下面几个:1、示波器测量的波形是未经滤波时的波形,波形中带着许多干扰信号;2、电机电刷与接触片的电阻分布不均,在电机的转动过程中不断变化,造成电流波形的波动;3、电机运行时有较强的电磁辐射,在测量信号的传输线上造成扰动,针对这种扰动,可以交换示波器的探头极性尝试抑制这种扰动。因为示波器探头线的外围包围着一层屏蔽网,该网与地相连。5.2、系统误差分析在设计与调试的过程中,当把理论计算出的PI参数整定到调节器中,测试系统的响应,发现与仿真结果相关较大,但是总体趋势一致。\n虽然经过调试整改参数,但是系统的实际响应与理论计算得出的结果仍有一定的差别。固然我们调试系统的时间不长,更长时间的调试能进一步减小这种差别,但是可以预见并不能彻底地消除这种差别。显然这种差别的背后有更深层次的因素,这些因素虽然很多,造成的影响也大小不一,但是总体上可以归为以下几类:1、测量误差。尽管我们的仪器精度够高,但是总有它不能测量到的部分,比如电流表的读数存在估读,数字万用表的最后几位不断跳动等原因。这种误差总是存在,但是一般情况下影响很小,对理论的计算影响有限,但是这种误差如果存在于系统的反馈环节,其影响就会大很多。在本系统中的电流环的整定中,我们对电流反馈系数α的整定就依赖于对电流表的准确读数,但实验装置中的电流表为传统指针式电流表,很容易发生因人为因素引起的读数错误。2、模型上的误差。我们在建立系统各环节的数学模型时,为了简化计算等其他便利,往往采取了更为简单便是不那么准确的数学模型。这是一种工程上常用的策略,及在牺牲精确度的同时降低计算难度。尽管就单独一个环节而言我们牺牲的精确度很小,但是当各个环节串连起来是,很难保证这种故意带来的误差不被放大。3、元器件的老化等其他因素。电容的漏电就是最好的例子,我们在做实验时,并不能保证从电容阵列上选取的电容的实际电容值就等于标称的电容值,而且我们也没有进行必要的测量。5.3、实验中出现的一些问题在实验开始前,一定要深刻理论实验原理,熟悉操作步骤,以避免不必要的麻烦。尤其是要注意不要弄反了反馈信号的极性,另外也要注意导线不要缠绕在电机的转轴上。在多人合作完成实验时,一定要有统一的指挥,不能发生类似一人在调节电机电枢限流电阻,而另一人却在调节的负载电阻的情况。最好一次只调节一个参数。在后来与同学的交流中发现,若是在采集波形时使用示波器储存为波形文件,或者储存为数据文件,更便于后期对数据的处理。若储存为csv数据文件,可以用matlab的csvload函数加载数据并进行处理,这种做法所带来的误差更小,同时可以进行更准确的仿真。一、结束语在两次实验中,我首次参与了构造一个完整的自动控制系统的实践,虽然是在老师的指导下完成,虽然这个系统根本不是我自己设计的,虽然还有很多地方我没弄明白,虽然最后的效果也没有我理想中的那么好,但是我还是收获颇丰。这次实验加深了我对课本知识的理解,煅炼了自己的动手能力,认识到了本专业中理论与实践相结合的重要性。我对本专业的兴趣更加深厚,体会到了本专业的强烈实践性。\n参考文献:电力拖动自动控制系统——运动控制系统(第三版) 上海大学 陈伯时 控制系统的MATLAB仿真与设计 王海英 袁丽英 吴 勃自动控制原理第二版高等教育出版社黄家英