

- 2.20 MB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
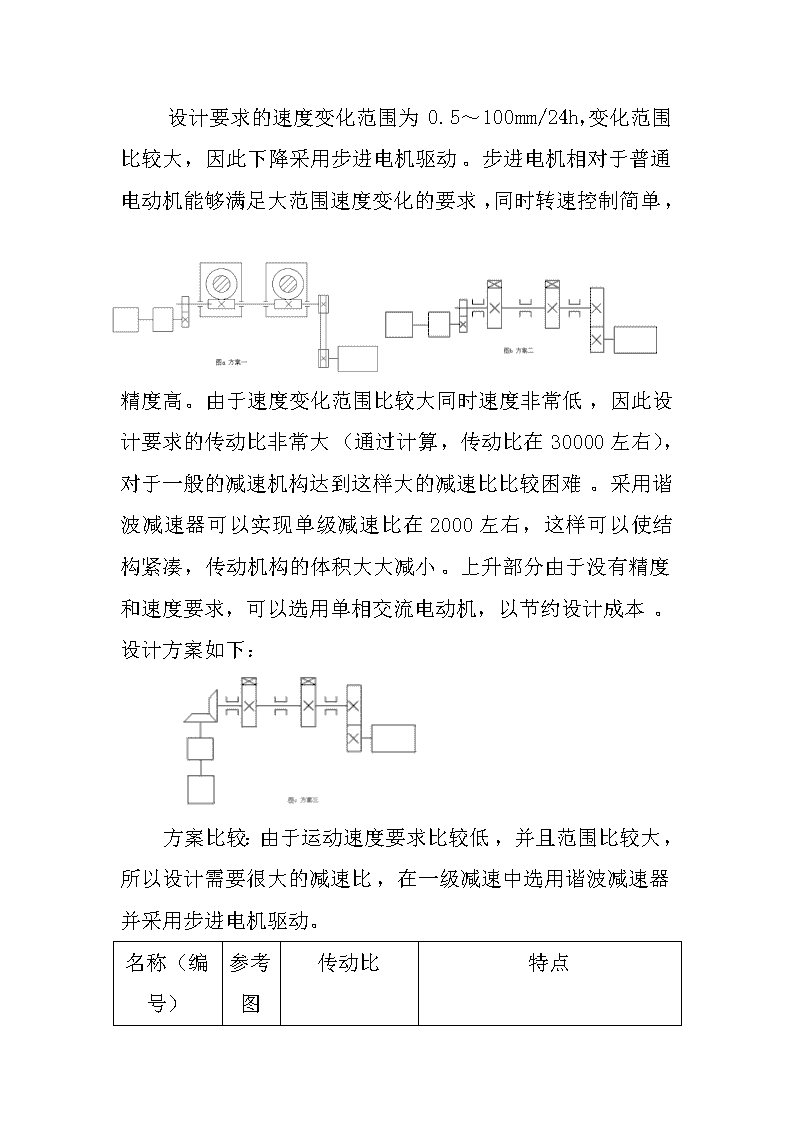
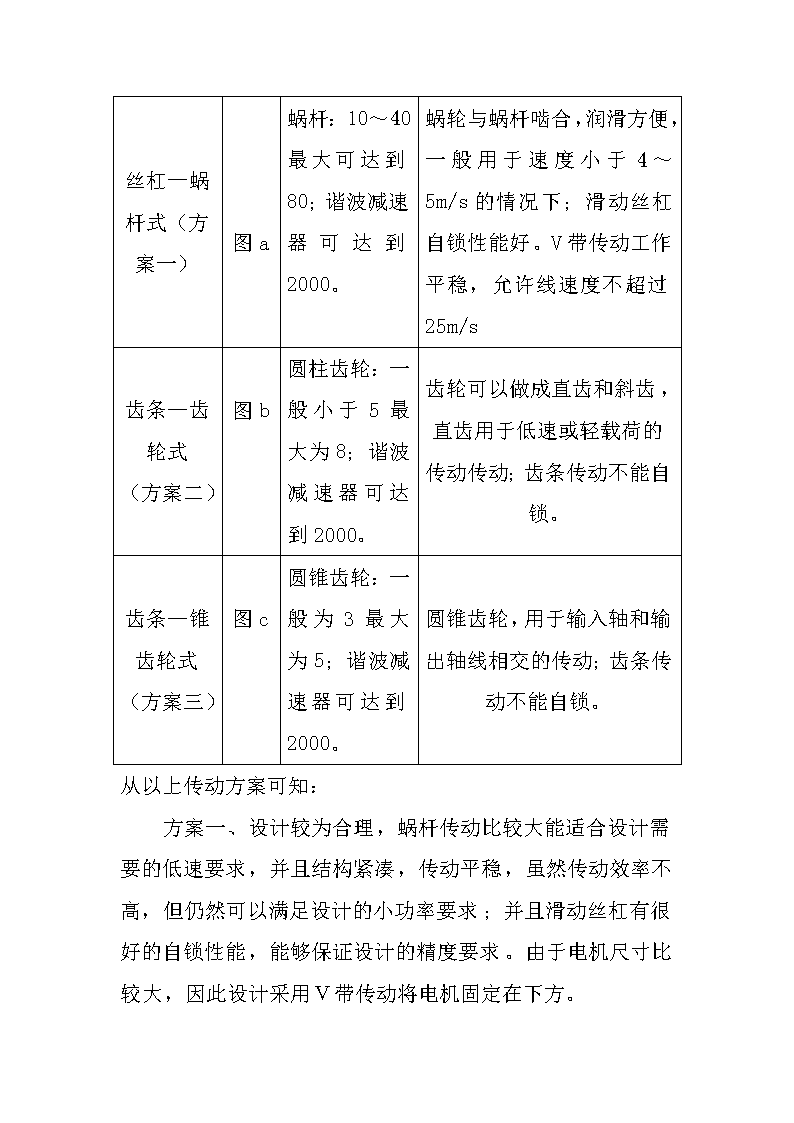
微机控制超低速运动下降杆设计作者:孙国浩指导教师:郑堤(宁波大学工学院,浙江宁波)摘要:本设计主要介绍了超低速运动下降杆的设计,用于单晶生长。设计包括机械设计和控制设计两大块。在机械设计中,本文主要说明了机械结构的方案选择和设计计算。在控制部分中,文章重点阐述了单片机的外围电路开发、电机的控制电路设计和电源设计三大部分。关键词:低速;机械结构;单片机;电路1引言为满足晶体生长而设计出超低速下降机构。本设计适用于下降法生长晶体。设计主要满足下降过程中的精度和速度变化的要求。目前,下降法晶体生长的机构大多是要人工操作来实现速度的改变,并且速度的变化范围很小。本次设计采用单片机控制步进电机来实现下降速度的变化,设计的速度变化范围广、精度高。使晶体生产过程实现自动控制,操作简单,大大提高了生产效率。并且本设计采用的零部件加工和采购成本底,能够降低小型企业生产成本投入。2结构设计(总装图参见附录二)2.1结构方案的比较与选择\n设计要求的速度变化范围为0.5~100mm/24h,变化范围比较大,因此下降采用步进电机驱动。步进电机相对于普通电动机能够满足大范围速度变化的要求,同时转速控制简单,精度高。由于速度变化范围比较大同时速度非常低,因此设计要求的传动比非常大(通过计算,传动比在30000左右),对于一般的减速机构达到这样大的减速比比较困难。采用谐波减速器可以实现单级减速比在2000左右,这样可以使结构紧凑,传动机构的体积大大减小。上升部分由于没有精度和速度要求,可以选用单相交流电动机,以节约设计成本。设计方案如下:方案比较:由于运动速度要求比较低,并且范围比较大,所以设计需要很大的减速比,在一级减速中选用谐波减速器并采用步进电机驱动。名称(编号)参考图传动比特点\n丝杠—蜗杆式(方案一)图a蜗杆:10~40最大可达到80;谐波减速器可达到2000。蜗轮与蜗杆啮合,润滑方便,一般用于速度小于4~5m/s的情况下;滑动丝杠自锁性能好。V带传动工作平稳,允许线速度不超过25m/s齿条—齿轮式(方案二)图b圆柱齿轮:一般小于5最大为8;谐波减速器可达到2000。齿轮可以做成直齿和斜齿,直齿用于低速或轻载荷的传动传动;齿条传动不能自锁。齿条—锥齿轮式(方案三)图c圆锥齿轮:一般为3最大为5;谐波减速器可达到2000。圆锥齿轮,用于输入轴和输出轴线相交的传动;齿条传动不能自锁。从以上传动方案可知:方案一、设计较为合理,蜗杆传动比较大能适合设计需要的低速要求,并且结构紧凑,传动平稳,虽然传动效率不高,但仍然可以满足设计的小功率要求;并且滑动丝杠有很好的自锁性能,能够保证设计的精度要求。由于电机尺寸比较大,因此设计采用V带传动将电机固定在下方。\n方案二、由于采用齿轮传动来达到减速要求,其减速比不如方案一中的蜗杆传动;并且齿条不能自锁对于设计精度会产生影响。方案三、由于锥齿轮加工比较困难,一般用于改变轴的方向时使用,在此设计中没有改变的要求。综上所述,选用方案一作为传动方案。2.2零件设计与选用2.2.1电机选用交流电机驱动:载荷F=1500N,速度初定810-3m/s。因载荷平稳,电动机额定功率Ped略大于Pd即可。通过计算得Pd=85.7W,选用电动机的额定功率Ped为90W,n0=1400rpm。步进电机驱动:载荷F=500N,速度0.5~1000mm/24h。通过计算选用常州宝马集团公司前杨电机厂生产的三相步进电机:36BF003。按三相六拍工作时,步矩角:α=1.5°,电压:27V,电流:1.5A,保持转矩:0.78Nm/0.8kgcm,空载启动频率:3100Hz,转动惯量:7.8×10-7kgm2。2.2.2蜗杆设计与校核选用ZA蜗杆传动,精度8cGB10089-1988。蜗杆选用45钢,齿表面淬火,硬度45~55HRC;表面粗糙度Ra≤1.6μm。蜗轮选用QA110-3-1.5金属模铸造。QA110-3-1.5为铝青铜,强度高、耐磨性强。设计得:i=n1/n2=15,z1=2,z2=\niz1=15×2=30,m=1.6校核(略)2.2.3丝杠设计螺杆材料选用45钢,调制处理;螺母材料QA110-3-1.5。设计得:d=24,P=5,d2=21.5,D4=24.5,d3=18.5,D1=19的梯形螺纹,中等精度,螺旋副的标记为Tr24×5-7H/7e。螺母高度H=40mm,=螺纹圈数n=8圈。校核(略)2.2.4谐波减速器选用根据设计要求选用XB2内齿复波谐波减速器:型号25;减速比为2016;传动效率30%;输入最高转速3000rpm;输出最大转矩2N·m;能够满足设计要求。2.2.5离合机构设计方案一:双向离合器,没有符合设计要求的产品型号;方案二:电磁离合器,由于长期工作在闭合状态,所以对于离合器的寿命和工作稳定性会有影响;方案三:滑移齿轮通过拨叉实现左右滑动。拨叉机构通过杠杆实现运动的转化,在手柄的两个位置中间有弹簧钢球来现位置的固定。在任何一个位置都会通过钢球\n固定。(如右图)综合比较,采用方案三。3控制部分设计(电气图参见附录一)3.1控制面板设计根据设计要求设计:面板操作简便,人机界面友好。(设计见附录三)说明:显示器可以显示位移、时间、速度;其中位移的显示精度为1μm,时间显示精度为1min,速度为0.01mm/day。时间和位移使用同一组显示器。可以通过“时/位”按钮切换,通过指示灯表示现在显示的内容。可以“功能”→“预置”功能下通过方向键择存储的速度。并且“预置”可以存储目前的速度。“功能”和数字键可以自由设定速度。“功能”→“零点”将时间和位移清零。“复位”按钮可以将系统复位。“上升”控制交流电机工作。3.2芯片选择与电路设计3.2.1单片机选择根据设计要求选用MSC—51系列单片机。由于程序需要的地址和内存比较小,可以选用8051单片机不需要扩展外部数据和程序存储器。8051具有4K片内ROM,和128K片内RAM。可以减少芯片的数目使系统稳定性强。3.2.28255扩展与键盘、显示器接口设计8255与8051的接口方法:\n8255的、分别连接8051的、;8255的D0~D7接8051的P0口;采用线选法寻址8255,P2.7(A15)接8255的CS,8051的最底两位地址线连接8255端口选择线A1A0,所以8255的地址分别为7FFCH、7FFDH、7FFFH。键盘和显示器的接口:通过8255的PA、PB和PC口扩展键盘和显示器。8255的PA口为输出口,控制键盘的列线Y0~Y5的电位作为键扫描口,同时又是8位显示器的扫描口,PC为显示器的段数据口,PB为输入口。闭合键号的计算:N=行首键号+列号。3.2.3步进电机与交流电机驱动电路步进电机控制电路驱动原理:采用单电压驱动,通过控制8051输出口的电压来控制光电耦合器4N25的工作。当8051控制口输出低电压时,4N25工作三极管VT1导通步进电机绕组通电;当8051控制口输出高电压时,4N25发光管两端无电压,则4N25不工作VT1不导通步进电机绕组断电。光电偶合器作用:抗干扰、响应时间短、能够吸收尖峰干扰信号。交流电机控制电路:\n驱动原理:和步进电机驱动相似;由于交流电源电压为220V,所以通过驱动继电器KM来控制交流电机的工作。由于+27电源为步进电机电源,在此采用此电源作为继电器的控制电压,节省电源。3.2.4速度设定过程采用时间中断进行速度调节,设输入的下降速度为:mm/24h转换,晶震为12MHz。公式如下:(十进制)=(十六进制)3.2.5电源设计步进电机为+27V支流电源驱动,驱动电流要求1.5A,单片机为+5V直流电源驱动但电流很小。设计电路(参见附录一电源部分)220V交流电压经过变压器降压,在经过全波整形电路整形。整形后通过电容滤波和电容消震。+5V部分再通过MC7805T三端稳压器稳压在+5V,0.1μf的电容为了提高电源的稳压性和减少输出波纹,可以起到防震的作用。4结束语本次设计基本上完成了超低速下降杆的设计开发的任务,该机构能够满足晶体生长的要求。由于时间紧没有对单片机控制设计中的程序进行完整的设计。\n对于键盘的功能还可以在今后的设计中进一步完善,其外观结构和造型的设计也是很重要的;可以根据用户的需求采用点阵式液晶显示器,使人机界面更加友好,使操作更加简便,以适合实际应用场合的需要。机械部分,可以采用电动控制滑移齿轮,这样可以提高产品的自动化程度。由于设计时间比较短,在多地方可以改善的部分希望在以后能够得到完善。参考文献[1]郑堤,唐可洪主编.机电一体化设计基础.北京:机械工业出版社,1997[2]蔡春源主编.新编机械设计手册.辽宁:辽宁科学技术出版社,1993[3]北京中技克美谐波有限责任公司.谐波传动.北京:北京中技克美谐波有限责任公司内部资料,2001[4]张友德,赵志英,涂时亮编著.单片微型机原理、应用与实验(第三版).上海:复旦大学出版社,2000[5]濮良贵,纪名刚主编.机械设计(第七版).北京:高等教育出版社,2001[6]谭建荣,张树有、陆国栋、施岳定编著.图学基础教程.北京:高等教育出版社,1999[7]潘新民,王燕芳编著.微型计算机控制技术.北京:高等教育出版社,2001[8]甘永力主编.几何公差与检测(第五版).\n上海:上海科学技术出版社,2003[10]孙恒、陈作模主编.机械原理(第六版).北京:高等教育出版社,2000[11]成大先主编.机械设计手册.北京:化学工业出版社,1993[12]王晓明主编.电动机的单片机控制.北京:北京航空航天大学出版社,2002[13]周开勤主编.机械零件手册( 第3版).北京:高等教育出版社, 1989[14]龚桂义主编.机械设计课程设计图册(第3版). 北京: 高等教育出版社, 1989.5[15]曲学基,王增福,曲敬铠编著.稳定电源实用电路选编[专著] .北京: 电子工业出版社, 2003附录一:电气图\n附录二:机械装配图附录三:控制面板\n\n