

- 770.50 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
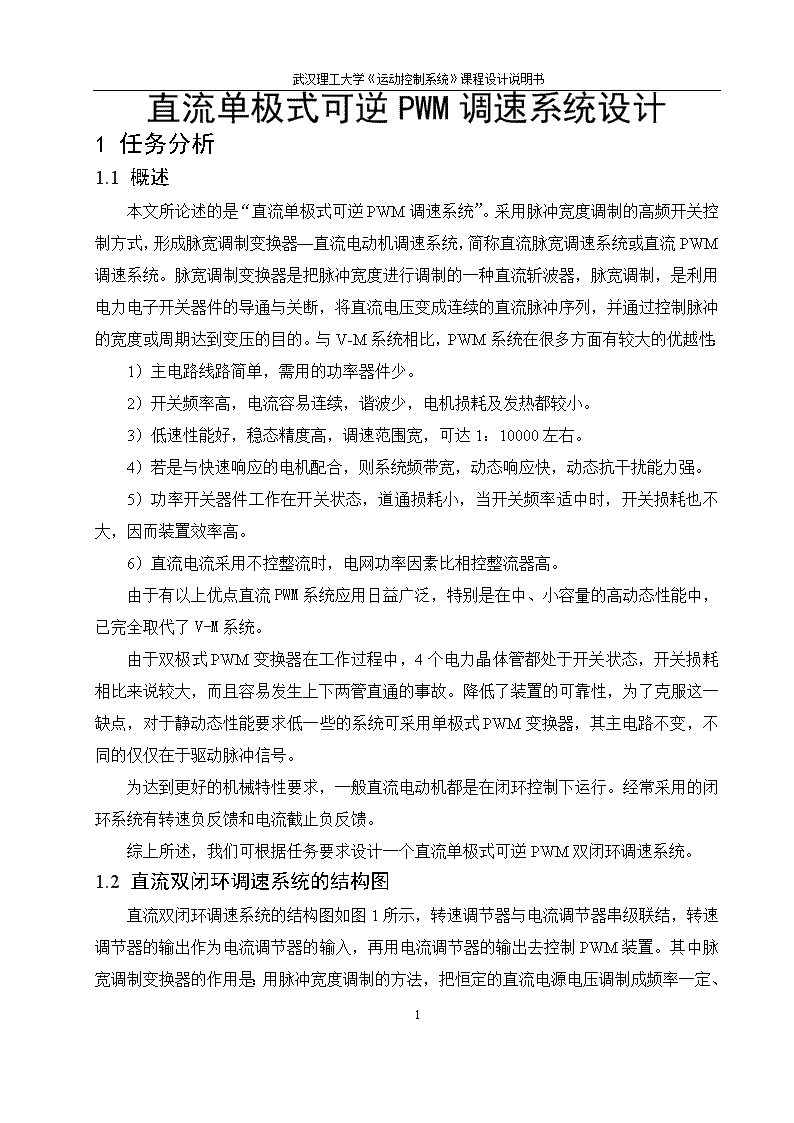
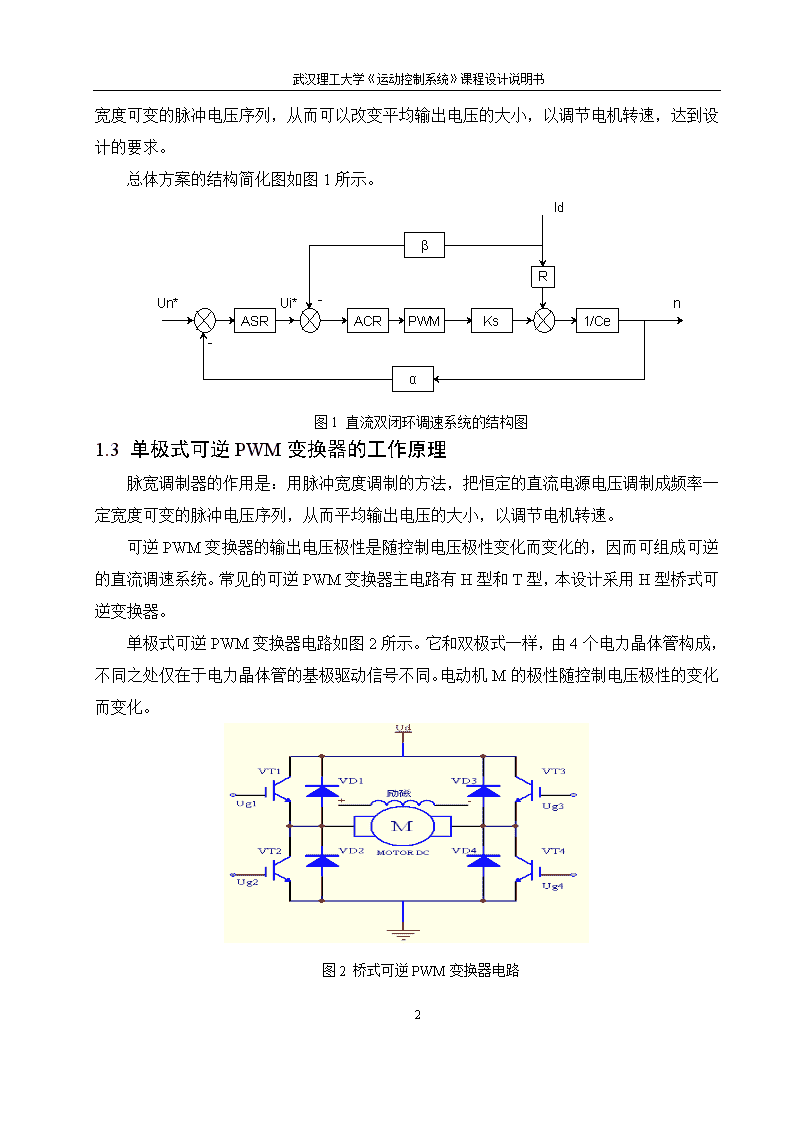
武汉理工大学《运动控制系统》课程设计说明书目录1任务分析11.1概述11.2直流双闭环调速系统的结构图11.3单极式可逆PWM变换器的工作原理21.4PWM调速系统的静特性42电路设计52.1给定及偏移电源52.2双环调节器电路62.2.1转速调节器62.2.2电流调节器62.3信号产生电路72.4驱动电路82.5转速及电流检测电路102.5.1转速检测电路102.5.2电流传感器103调节器的参数整定113.1电流调节器参数的计算113.2转速调节器的参数整定123.3参数的校验133.3.1电流参数的校验133.3.2转速参数的校验143.3.3校验退饱和转速超调量144心得体会15参考文献16附录1717\n武汉理工大学《运动控制系统》课程设计说明书直流单极式可逆PWM调速系统设计1任务分析1.1概述本文所论述的是“直流单极式可逆PWM调速系统”。采用脉冲宽度调制的高频开关控制方式,形成脉宽调制变换器—直流电动机调速系统,简称直流脉宽调速系统或直流PWM调速系统。脉宽调制变换器是把脉冲宽度进行调制的一种直流斩波器,脉宽调制,是利用电力电子开关器件的导通与关断,将直流电压变成连续的直流脉冲序列,并通过控制脉冲的宽度或周期达到变压的目的。与V-M系统相比,PWM系统在很多方面有较大的优越性:1)主电路线路简单,需用的功率器件少。2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小。3)低速性能好,稳态精度高,调速范围宽,可达1:10000左右。4)若是与快速响应的电机配合,则系统频带宽,动态响应快,动态抗干扰能力强。5)功率开关器件工作在开关状态,道通损耗小,当开关频率适中时,开关损耗也不大,因而装置效率高。6)直流电流采用不控整流时,电网功率因素比相控整流器高。由于有以上优点直流PWM系统应用日益广泛,特别是在中、小容量的高动态性能中,已完全取代了V-M系统。由于双极式PWM变换器在工作过程中,4个电力晶体管都处于开关状态,开关损耗相比来说较大,而且容易发生上下两管直通的事故。降低了装置的可靠性,为了克服这一缺点,对于静动态性能要求低一些的系统可采用单极式PWM变换器,其主电路不变,不同的仅仅在于驱动脉冲信号。为达到更好的机械特性要求,一般直流电动机都是在闭环控制下运行。经常采用的闭环系统有转速负反馈和电流截止负反馈。综上所述,我们可根据任务要求设计一个直流单极式可逆PWM双闭环调速系统。1.2直流双闭环调速系统的结构图直流双闭环调速系统的结构图如图1所示,转速调节器与电流调节器串级17\n武汉理工大学《运动控制系统》课程设计说明书联结,转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制PWM装置。其中脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电机转速,达到设计的要求。总体方案的结构简化图如图1所示。图1直流双闭环调速系统的结构图1.3单极式可逆PWM变换器的工作原理脉宽调制器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定宽度可变的脉冲电压序列,从而平均输出电压的大小,以调节电机转速。可逆PWM变换器的输出电压极性是随控制电压极性变化而变化的,因而可组成可逆的直流调速系统。常见的可逆PWM变换器主电路有H型和T型,本设计采用H型桥式可逆变换器。单极式可逆PWM变换器电路如图2所示。它和双极式一样,由4个电力晶体管构成,不同之处仅在于电力晶体管的基极驱动信号不同。电动机M的极性随控制电压极性的变化而变化。图2桥式可逆PWM变换器电路17\n武汉理工大学《运动控制系统》课程设计说明书单极式可逆PWM变换器的驱动脉冲:,VT1和VT2交替导通(和双极式一样)、改成因电机的转向而施加不同的直流控制信号。电机正转时,使恒为负,恒为正,则VT3截止而VT4常通。电机反转时,则恒为正,而恒为负,使VT3常通而VT4截止。下面分析当控制电压为正即当电机正向电动时,在一个开关周期内:时,和为正,晶体管VT1和VT4饱和导通;和为负,VT2和VT3截止。这时。当时,变负,VT1和VT3截止,VT4导通;变正,但VT2仍不通,正向电流沿VD2和VT4续流。这时。ttttT0000图3单极式可逆PWM变换器的驱动电压电流波形单极式控制可逆PWM变换器的输出平均电压为17\n武汉理工大学《运动控制系统》课程设计说明书如果定义占空比,电压系数则在单极式可逆变换器中调速时,的可调范围为0~1相应的的范围也为0~1。由于单极式PWM变换器的电力晶体管VT3和VT4两者之中总有一个是常通的,而另一个是截止的,运行中不用频繁地交替导通。因此,单极式变换器的开关损耗要比双极式小,装置的可靠性有所提高。但此电路无高频微振,启动较慢,其低速性能不如双极性的好。1.4PWM调速系统的静特性由于采用了脉宽调制,电流波形都是连续的,因而机械特性关系式比较简单,电压平衡方程如下.按电压平衡方程求一个周期内的平均值,即可导出机械特性方程式,电枢两端在一个周期内的电压都是,平均电流用表示,平均转速,而电枢电感压降的平均值在稳态时应为零。于是其平均值方程可以写成则机械特性方程式17\n武汉理工大学《运动控制系统》课程设计说明书2电路设计桥式可逆直流脉宽调速系统主电路的如图4所示。PWM变换器的直流电源由交流电网经不控的二极管整流器产生,并采用大电容滤波,以获得恒定的直流电压。由于电容容量较大,突加电源时相当于短路,势必产生很大的充电电流,容易损坏整流二极管,为了限制充电电流,在整流器和滤波电容之间传入电阻Rz,合上电源后,用延时开关将Rz短路,以免在运行中造成附加损耗。由于直流电源靠二极管整流器供电,不可能回馈电能,电动机制动时只好对滤波电容充电,这式电容器两端电压升高称作“泵升电压”。为了限制泵升电压,用镇流电阻Rx消耗掉这些能量,在泵升电压达到允许值时接通。图4桥式可逆直流脉宽调速系统主电路2.1给定及偏移电源此电路用于产生±15V电压作为转速给定电压以及基准电压,如图5所示:图5给定电压电路图17\n武汉理工大学《运动控制系统》课程设计说明书2.2双环调节器电路为了实现闭环控制,必须对被控量进行采样,然后与给定值比较,决定调节器的输出,反馈的关键是对被控量进行采样与测量。两个回路构成一个串级控制系统。主回路对转速进行调节,副回路对电流进行调节。2.2.1转速调节器转速反馈电路如图7所示,由测速发电机得到的转速反馈电压含有换向纹波,因此也需要滤波,由初始条件知滤波时间常数。根据和电流环一样的道理,在转速给定通道上也加入相同时间常数的给定滤波环节。图6含给定滤波与反馈滤波的PI型转速调节器2.2.2电流调节器由于电流检测中常常含有交流分量,为使其不影响调节器的输入,需加低通滤波。此滤波环节传递函数可用一阶惯性环节表示,由初始条件知滤波时间常数,以滤平电流检测信号为准。为了平衡反馈信号的延迟,在给定通道上加入同样的给定滤波环节,使二者在时间上配合恰当。图7含给定滤波与反馈滤波的PI型电流调节器17\n武汉理工大学《运动控制系统》课程设计说明书2.3信号产生电路PWM生成电路如图8所示,SG3524生成的PWM信号经过一个非门转为两路相反的PWM信号,为了确保上下两桥臂不会直通发生事故,中间加入电容、进行逻辑延时,后面再加上非门和与门构成的电路。图8PWM生成电路本设计采用集成脉宽调制器SG3524作为脉冲信号发生的核心元件。根据主电路中IGBT的开关频率,选择适当的、值即可确定振荡频率。由初始条件知开关频率为10kHz,可以选择,。电路中的PWM信号由集成芯片SG3524产生,SG3524可为脉宽调制式推挽、桥式、单端及串联型SMPS(固定频率开关电源)提供全部控制电路系统的控制单元。由它构成的PWM型开关电源的工作频率可达100kHz,适宜构成100-500W中功率推挽输出式开关电源。SG3524采用是定频PWM电路,DIP-16型封装。由于构成单极式PWM变换器要保证,且当为正时,恒为负,恒为正。当为负时,恒为正,恒为负。由SG3524构成的单极式PWM变换器电路图如图9所示,由15脚输入+15V电压,用于产生+5V基准电压。9脚是误差放大器的输出端,在1、9引脚之间接入外部阻容元件构成PI调节器,可提高稳态精度。13引脚通过电阻与+15V电压源相连,供内部晶体管工作,由电流调节器输出的控制电压作为2引脚输入,通过其电压大小调节11、14引脚的输出脉冲宽度,实现脉宽调制变换器的功能实现。17\n武汉理工大学《运动控制系统》课程设计说明书图9单极式PWM变换器电路图SG3524的基准源属于常规的串联式线性直流稳压电源,它向集成块内部的斜波发生器、PWM比较器、T型触发器等以及通过16脚向外均提供+5V的工作电压和基准电压,振荡器先产生0.6V-3.5V的连续不对称锯齿波电压Vj,再变换成矩形波电压,送至触发器、或非门,并由3脚输出。振荡器频率由SG3524的6脚、7脚外接电容器CT和外接电阻器RT决定,其值为:f=1.15/RTCT。考虑到对CT的充电电流为(1.2-3.6/RT一般为30μA-2mA),因此RT的取值范围为1.8kΩ~100kΩ,CT为0.001μF~0.1μF,其最高振荡频率为300kHz。开关电源输出电压经取样后接至误差放大器的反相输入端,与同相端的基准电压进行比较后,产生误差电压Vr,送至PWM比较器的一个输入端,另一个则接锯齿波电压,由此可控制PWM比较器输出的脉宽调制信号。2.4驱动电路IGBT驱动采用芯片IR2110,IR2110采用14端DIP封装,引出端排列如图10所示。图10IR2110管脚图17\n武汉理工大学《运动控制系统》课程设计说明书它的各引脚功能如下:脚1(LO)是低端通道输出;脚2(COM)是公共端;脚3(Vss)是低端固定电源电压;脚5(Us)是高端浮置电源偏移电压;脚6(UB)是高端浮置电源电压;脚7(HO)是高端输出;脚9(VDD)是逻辑电路电源电压;脚10(HIN)、脚11(SD)、脚12(LIN)均是逻辑输入;脚13(Vss)是逻辑电路地电位端外加电源电压,其值可以为0V;脚4、脚8、脚14均为空端。IGBT驱动电路如图11所示。IR2110采用HVIC和闩锁抗干扰CMOS工艺制作,具有独立的高端和低端输出通道;浮置电源采用自举电路,其工作电压可达500V,du/dt=±50V/ns,在15V下的静态功耗仅有1.6mW;输出的栅极驱动电压范围为10~20V,逻辑电源电压范围为5~15V,逻辑电源地电压偏移范围为-5V~+5V。IR2110采用CMOS施密特触发输入,两路具有滞后欠压锁定。推挽式驱动输出峰值电流≥2A,负载为1000pF时,开关时间典型值为25ns。两路匹配传输导通延时为120ns,关断延时为94ns。IR2110的脚10可以承受2A的反向电流。图11IGBT驱动电路17\n武汉理工大学《运动控制系统》课程设计说明书2.5转速及电流检测电路2.5.1转速检测电路根据课程设计要求,测速电机为永磁式测速发电机,它与电动机同轴安装,从而引出与被调量转速成正比的负反馈电压,与给定电压相比较后,得到转速偏差电压输送给转速调节器。测速发电机的输出电压不仅表示转速的大小,还包含转速的方向,测速电路接线图如图12所示,通过调节电位器即可改变转速反馈系数。图12转速检测电路2.5.2电流传感器在此我们通过霍尔传感器测量电流,电流检测电路原理图如图13所示:图13电流检测电路17\n武汉理工大学《运动控制系统》课程设计说明书3调节器的参数整定电流调节器以及转速调节器的电路结构如图13所示,由单刀双掷开关控制电机转向,滑动变阻器RP1、RP2分别调节正反转时的转速,RP3可以改变电流的限幅值,下面分别按设计要求计算电路中的各个参数。转速反馈系数电流反馈系数计算调节器参数之前,先根据电动机的额定参数计算电动势系数,额定状态运行时于是可得为了能更好的整定,我们在此根据实际情况设定一些辅助条件。在此我们设定电枢回路电磁时间常数为Tl=0.03s,Tm=0.18s,并设定电力电子变换器的内阻为Rrec=0.8Ω。所以可得超前时间常数τi=Tl=0.03s,回路总电阻为R=0.8+0.2=1Ω。设定PWM控制电路的放大系数为Ks=40。电流允许过载倍数λ=1.5。给定电压设为10V。在此设定所有运算放大器的R0=40kΩ。3.1电流调节器参数的计算从设计要求上看,实际系统不允许电枢电流有太大的超调(σi≤5%),而且要求系统电流无静差,为此,电流环应一跟随性能为主,即选用典型I型系统。首先确定时间常数,根据上面的分析可得电流滤波时间常数Toi=0.002s,通过查阅相关资料可得PWM调压系统的滞后时间Ts=0.0001s,电流环小时间常数之和,按小时间常数近似处理,取17\n武汉理工大学《运动控制系统》课程设计说明书根据前面分析我们取传递函数为:电流开环增益:因要求,故应取,因此由此可得ACR的比例系数为:根据比例系数我们可得,取运算放大器的R0=40kΩ,各电阻和电容值为:,取60KΩ。,取0.5uF。,取0.2uF。3.2转速调节器的参数整定首先确定转速环时间常数。电流环等效时间常数。转速滤波时间常数,根据测速发电机的纹波情况取;转速环小时间常数,按小时间常数尽速处理取根据设计要求,转速环应该设计为典型Ⅱ型系统,调节器也应采用PI型,其传递函数为根据跟随性和抗干扰性能都较好的原则取。则ASR超前时间常数17\n武汉理工大学《运动控制系统》课程设计说明书转速环开环增益于是ASR的比例系数为由运算放大器可得,各电阻和电容值计算如下:,取750kΩ。,取0.1uF。,取1uF。3.3参数的校验3.3.1电流参数的校验校验近似条件:电流环截止频率。校验PWM调压系统传递函数的近似条件是否满足。因为,所以满足近似条件。校验忽略反电动势对电流环影响的近似条件是否满足。现在,满足近似条件。校验小时间常数近似处理是否满足条件。17\n武汉理工大学《运动控制系统》课程设计说明书现在,满足近似条件。按照上述参数,电流环满足动态设计指标要求和近似条件。3.3.2转速参数的校验校验近似条件:转速环截止频率。校验电流环传递函数简化条件是否满足。现在,满足简化条件。校验小时间常数近似处理是否满足。现在,满足近似条件。3.3.3校验退饱和转速超调量当h=5时,查表得,δn=37.6%,不能满足设计要求。实际上,由于这是按线性系统计算的,而突加阶跃给定时,ASR饱和,不符合线性系统的前提,应该按ASR退饱和的情况重新计算超调量。设理想空载起动时负载系数z=0,已知电机参数:PN=10KW,UN=220V,IN=55A,nN=1000r/min,Ra=0.2Ω,直流它励励磁电压220V,电流1.6A;PWM装置放大系数Ks=40;时间常数Tm=0.1s,Tl=0.03s;永磁式测速发电机参数:23W,110V,0.21A,1900r/min。当时,。则。综上所述,系统的各项静动态性能指标都能满足设计要求。可使系统达到快速、准确和稳定,具有可行性和实用性。17\n武汉理工大学《运动控制系统》课程设计说明书4心得体会理论的学习使我们掌握了有关有关运控的各方面知识。随着科技不断发展进步,电力拖动控制系统也同我们的生活息息相关,在我们的生活中扮演的角色也越来越重要。这次课程设计总共不到两个星期的时间,而且期间穿插着元旦放假以及另外一门课设,时间比较紧,但是即使这样,我也积极地进行准备,认真分析老师所给的任务书。刚开始时,我看到我的题目为单极式PWM调速系统,还暗自庆幸比那些双极式的要简单。但是做了段时间,就被卡住了,在单极式PWM变换器的实现上,我想了很多方法,可惜都不能成功。但是我认真对单极式的原理以及工作过程分析后,认识到其中的一些逻辑关系,终于将困难解决掉。在做运控课程设计的过程中我更能认真和全面的对所学知识有一个全面和系统更深刻的了解和掌握。在这个过程中我认真查阅了大量资料和工具书增长了我的知识,开阔了我的视野。不过我看得更多的还是教材,万变不离其宗,对任何一个设计其基本原理最终都可以在书本上找到答案。所以书本是最重要的,完全吃透书本课程设计才能发挥得更好。虽然课程设计源于书本,但是和应用于生活联系得更加紧密。这就要求我们在学习和生活的过程中每个人都要学会应用资源和我们自身的优势,同时留心观察身边的事物,做课设期间我们参观了武钢集团以及理工光科等,在看到里面那些高科技的产品其实归根结底其原理我们大家弄清楚了都是很简单的。所以我们必须要利用身边的资源去了解我们周围这个充满了高科技的世界。要在10天左右时间内做好两门课设,吃苦熬夜是必然的,舍不得吃苦是做不好任何事的。另外光能吃苦是不够的,还要有过硬的技术水平,有的同学基础扎实,一两个晚上就能完成设计,但有的同学却不知道怎么样开头,不知道要做什么,这就是差距。通过课程设计让自己明白自己所差的还很多很多……在接下来的日子里一定要努力学习以备将来走入社会能不让人用轻飘飘的眼神看自己。也用自己的所学来证明自己的尊严和人格。在这次设计中,由于我知识的欠缺,设计的并不详细,知识的衔接也不理想,错误应该是有的,但我很认真地去做了,设计中错误的地方希望老师能谅解,并加以指点。我会努力改正,力争在以后的课设和学习中更加完善。17\n武汉理工大学《运动控制系统》课程设计说明书参考文献[1]王兆安等.电力电子技术.北京.机械工业出版社,2000.[2]王离九.电力拖动自动控制系统.武汉.华中理工大学出版社,1991.[3]陈伯时.运动控制系统.北京.机械工业出版社,2003.[4]曾毅.现代运动控制系统工程.北京.机械工业出版社,2006.[5]孙立志.PWM与数字化电动机控制技术应用.北京.中国电力出版社,2008.17\n武汉理工大学《运动控制系统》课程设计说明书附录17