

- 458.50 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
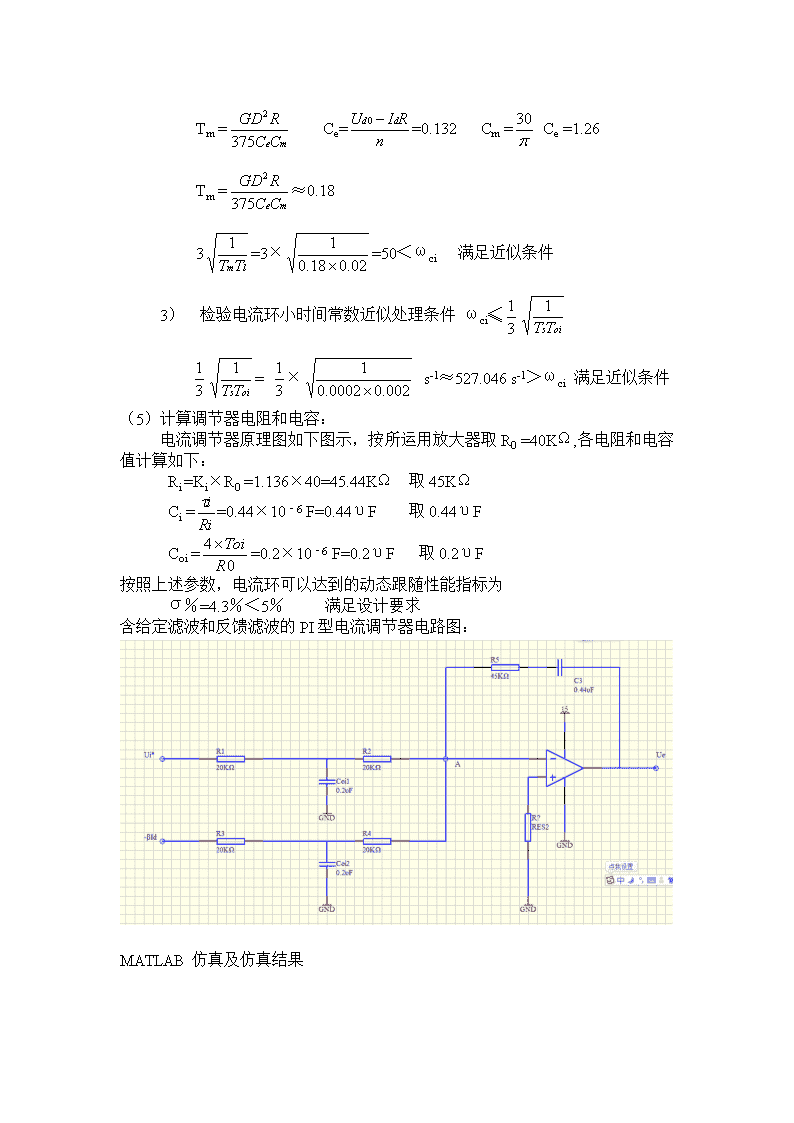
运动控制期中作业\n电流调节器的设计:(1)确定时间常数:1)给定PWM开关频率为5KHz,整流装置滞后时间常数Ts,Ts=1/f=1/5000=0.0002s2)电流滤波时间常数Toi,取Toi=0.002s=2ms。3)电流环小时间常数之和T∑i。按小时间常数近似处理,取T∑i=Ts+Toi=0.0022s。(2)选择电流调节器结构:根据设计要求σi≦5%,并保证稳态电流无差,可按典型Ⅰ系统设计电流调节器。电流环控制对象是双惯性型的,因此可用PI型电流调节器,其传递函数式:WACR(S)=。检查对电源电压的抗扰性能:Tl/T∑=≈9.1,参看表3‐2的典型Ⅰ型系统动态抗扰性能,都是可以接受的。(3)计算电流调节器的参数电流调节器超前时间常数:τi=Tl=0.02s电流环开环增益:要求σi≦5%时,根据表3-1,应取KIT∑i=0.5,因此KI==s-1≈227.27s-1于是ACR的比例系数为Ki=KI=227.27s-1τi=0.02sR=0.5Ωλ=1.5所以最大允许电流为:Idm=1.5×Inom=204A,给定Uim*=10V,则β==≈0.05取晶闸管放大系数Ks=40将以上数据带入Ki公式内即可求出Ki≈1.136(4)检验近似条件电流环截止频率:ωci=KI=227.27s-11)校验晶闸管整流装置传递函数的近似条件:Wci≤=s-1≈1666.7s-1﹥ωci满足近似条件2)校验忽略反电动势变化对电流环动态影响的条件:ωci≧33=3×\nTm=Ce==0.132Cm=Ce=1.26Tm=≈0.183=3×=50<ωci满足近似条件3)检验电流环小时间常数近似处理条件ωci≤=×s-1≈527.046s-1>ωci满足近似条件(5)计算调节器电阻和电容:电流调节器原理图如下图示,按所运用放大器取R0=40KΩ,各电阻和电容值计算如下:Ri=Ki×R0=1.136×40=45.44KΩ取45KΩCi==0.44×10﹣6F=0.44υF取0.44υFCoi==0.2×10﹣6F=0.2υF取0.2υF按照上述参数,电流环可以达到的动态跟随性能指标为σ%=4.3%<5%满足设计要求含给定滤波和反馈滤波的PI型电流调节器电路图:MATLAB仿真及仿真结果\n转速调节器的设计:(1)确定时间常数:1)电流环等效时间常数1/KI。已知取KIT∑i=0.5,则1/KI=2T∑i=2×0.0022s=0.0044s2)转速滤波时间常数Ton。根据测速发电机纹波情况,取Ton=0.01s。3)转速环小时间常数T∑n。按小时间常数近似处理,取T∑n=1/KI+Ton=0.0144s(2)选择转速调节器结构按照设计要求,选用PI调节器,其传递函数:WASR(S)=(3)计算转速调节器参数\n按跟随和抗扰性能都较好的原则,取h=5,则ASR的超前时间常数为τn=hT∑n=5×0.0144s=0.072s转速开环增益为:KN=≈578.7s-2于是,可以求得ASR的比例系数为:Kn=β=0.05α===0.007Ce=0.132Cm=1.26Tm=0.18所以,Kn==14.1(4)检验近似条件转速环截止频率为:ωcn==KNτn=578.7×0.072=41.7s-11)电流环传递函数简化条件=107.13s-1>ωcn满足简化条件2)转速环小时间常数近似处理条件=50.25s-1>ωcn满足近似条件(5)计算调节器电阻和电容转速调节原理图如下图所示,取R0=40KΩ,则Rn=KnR0=14.1×40=565.7KΩ取560KΩCn=≈0.9υF取0.9υFCon=≈1υF取1υF(6)校核转速超调量=2()(λ-z)\n当h=5时,=81.2%,z=0,T∑n=0.0144s,Tm=0.18,Ce=0.132=6.12%<10%经过以上参数的计算,则此系统能满足设计要求。MATLAB仿真及仿真结果\n(二)系统原理图的设计:1)供电电源电路图:本次设计采用桥式可逆PWM变换电路供电,PWM逆变器的直流电源由交流电网经不控的二极管整流器产生,并采用大电容Co滤波,以获得恒定的直流电压Us。由于直流电源靠二极管整流器供电,不可能回馈电能,电动机制动时只好对滤波的电容充电,这时电容器两端电压升高称作泵升电压。为了限制泵升电压,用镇流电阻Rz消耗掉这些能量,在泵升电压达到允许值时接通Vtz。给定基准电源此电路用于产生±15V电压作为转速给定电压以及基准电压,如下图所示:\n电路总的原理图心得体会:经过一个月的学习,我们完成了电流双闭环调速系统的课程设计,其中对双闭环系统有了更深刻的认识,对直流环和转速环的认识有了进一步的加深,在课堂上虽然理解了,但是在实际的应用中仍然会力不从心。本次课程设计时,感觉比较难做的还是系统总的原理图设计,和使用protel画原理图,在设计系统原理图的过程中,有很多不会做的,然后就查找书籍或者请教同学,去解决问题,当然其中也有很多地方走了不少的弯路,最后虽然做完了,但是感觉并不是那么好,但是看着自己的劳动成果,还是挺高兴的!\n本次设计过程中,我们用了protel和MATLAB进行画图和系统的仿真,对这两款的软件使用起来更加的得心应手了。本次设计,我的收获还是相当大的,学会了独立的去解决很多问题,而且对画图和仿真的方法也有了很好的理解。参考文献1.陈伯时电力拖动自动控制系统(第2版)机械工业出版社1991.42.孙树朴李明王勉华。电力电子技术中国矿业大学出版社2000.7