

- 498.35 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
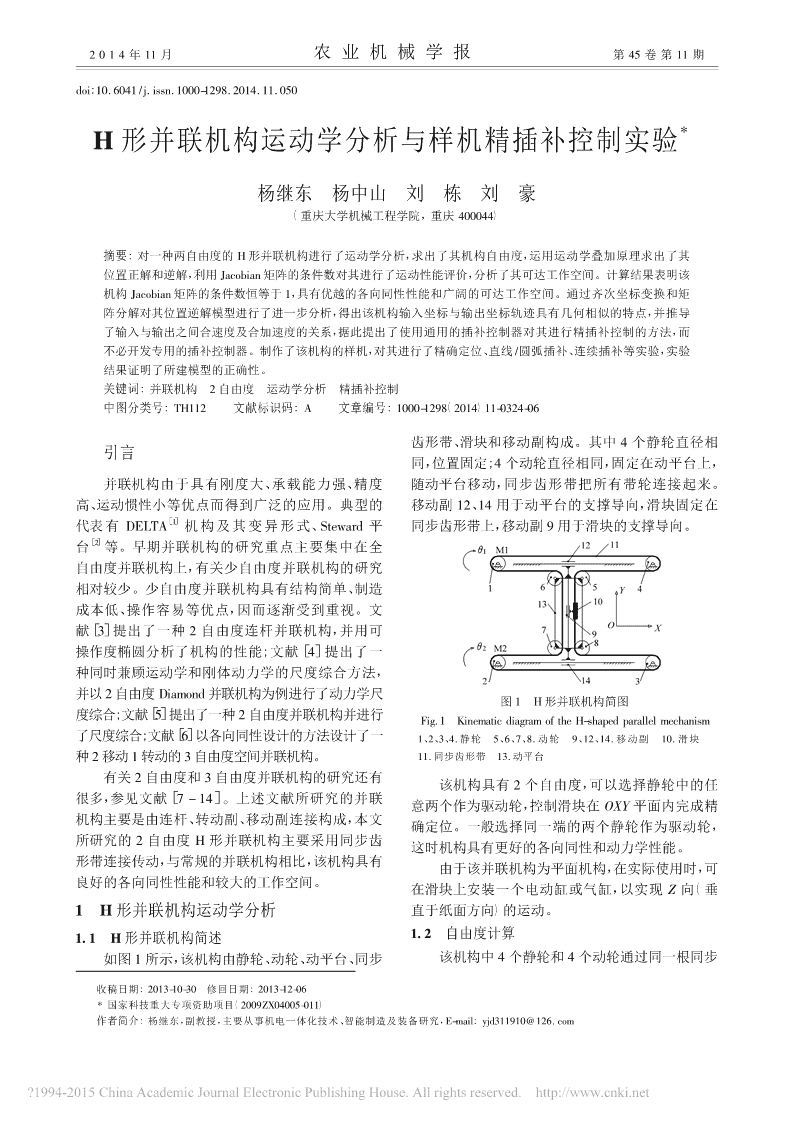
2014年11月农业机械学报第45卷第11期doi:10.6041/j.issn.1000-1298.2014.11.050*H形并联机构运动学分析与样机精插补控制实验杨继东杨中山刘栋刘豪(重庆大学机械工程学院,重庆400044)摘要:对一种两自由度的H形并联机构进行了运动学分析,求出了其机构自由度,运用运动学叠加原理求出了其位置正解和逆解,利用Jacobian矩阵的条件数对其进行了运动性能评价,分析了其可达工作空间。计算结果表明该机构Jacobian矩阵的条件数恒等于1,具有优越的各向同性性能和广阔的可达工作空间。通过齐次坐标变换和矩阵分解对其位置逆解模型进行了进一步分析,得出该机构输入坐标与输出坐标轨迹具有几何相似的特点,并推导了输入与输出之间合速度及合加速度的关系,据此提出了使用通用的插补控制器对其进行精插补控制的方法,而不必开发专用的插补控制器。制作了该机构的样机,对其进行了精确定位、直线/圆弧插补、连续插补等实验,实验结果证明了所建模型的正确性。关键词:并联机构2自由度运动学分析精插补控制中图分类号:TH112文献标识码:A文章编号:1000-1298(2014)11-0324-06齿形带、滑块和移动副构成。其中4个静轮直径相引言同,位置固定;4个动轮直径相同,固定在动平台上,并联机构由于具有刚度大、承载能力强、精度随动平台移动,同步齿形带把所有带轮连接起来。高、运动惯性小等优点而得到广泛的应用。典型的移动副12、14用于动平台的支撑导向,滑块固定在[1]代表有DELTA机构及其变异形式、Steward平同步齿形带上,移动副9用于滑块的支撑导向。[2]台等。早期并联机构的研究重点主要集中在全自由度并联机构上,有关少自由度并联机构的研究相对较少。少自由度并联机构具有结构简单、制造成本低、操作容易等优点,因而逐渐受到重视。文献[3]提出了一种2自由度连杆并联机构,并用可操作度椭圆分析了机构的性能;文献[4]提出了一种同时兼顾运动学和刚体动力学的尺度综合方法,并以2自由度Diamond并联机构为例进行了动力学尺图1H形并联机构简图度综合;文献[5]提出了一种2自由度并联机构并进行Fig.1KinematicdiagramoftheH-shapedparallelmechanism了尺度综合;文献[6]以各向同性设计的方法设计了一1、2、3、4.静轮5、6、7、8.动轮9、12、14.移动副10.滑块种2移动1转动的3自由度空间并联机构。11.同步齿形带13.动平台有关2自由度和3自由度并联机构的研究还有该机构具有2个自由度,可以选择静轮中的任很多,参见文献[7-14]。上述文献所研究的并联意两个作为驱动轮,控制滑块在OXY平面内完成精机构主要是由连杆、转动副、移动副连接构成,本文确定位。一般选择同一端的两个静轮作为驱动轮,所研究的2自由度H形并联机构主要采用同步齿这时机构具有更好的各向同性和动力学性能。形带连接传动,与常规的并联机构相比,该机构具有由于该并联机构为平面机构,在实际使用时,可良好的各向同性性能和较大的工作空间。在滑块上安装一个电动缸或气缸,以实现Z向(垂1H形并联机构运动学分析直于纸面方向)的运动。1.1H形并联机构简述1.2自由度计算如图1所示,该机构由静轮、动轮、动平台、同步该机构中4个静轮和4个动轮通过同一根同步收稿日期:2013-10-30修回日期:2013-12-06*国家科技重大专项资助项目(2009ZX04005-011)作者简介:杨继东,副教授,主要从事机电一体化技术、智能制造及装备研究,E-mail:yjd311910@126.com\n第11期杨继东等:H形并联机构运动学分析与样机精插补控制实验325齿形带连接传动,对于同步齿形带传动自由度的计析,可知机构在OXY坐标空间下的输出为算可类比齿轮传动:如图2a所示,N个齿轮串联组Δx1=-Δθ1r/2{(2)成齿轮系,其运动高副的个数为N-1个。而对于Δy1=-Δθ1r/2N个通过同一根同步齿形带串联的带轮(图2b),计(2)带轮M1不动,带轮M2转过角度Δθ2,经分算其自由度时,可把同步齿形带所引入的约束等效析可知机构在OXY坐标空间下的输出为为齿轮传动时的高副,这种“等效高副”的个数也为Δx2=Δθ2r/2(3)N-1个。{2Δy2=-Δθ2r/(3)机构在OXY坐标空间下的实际输出为带轮M1、M2输出的叠加,即Δx=Δx1+Δx2=(-Δθ1+Δθ2)r/2{(4)Δy=Δy1+Δy2=-(Δθ1+Δθ2)r/2在选取了输出坐标系OXY的坐标原点后,式(4)便可写成x=(-θ1+θ2)r/2{(5)图2串联齿轮系与带轮系y=-(θ1+θ2)r/2Fig.2Seriesgeartrainandseriesbeltgear式(5)即为该并联机构的位置正解结果。(a)串联齿轮系(b)带轮系1.4位置逆解实践表明,在含有同步齿形带传动的机构中,使由位置正解结果,可知位置逆解结果为用“等效高副”法所计算出的机构自由度与实际情θ1=-(x+y)/r{(6)况是相符的。在H形并联机构中,8个带轮通过同θ2=(x-y)/r一根同步齿形带相连,因此该机构中同步齿形带所2运动学性能评价引入的“等效高副”的个数为7。该机构包含8个同步齿形带轮和1个动平台,2.1Jacobian矩阵及机构运动学性能指标因此其活动构件数N=9。转动副的个数为8,移动对式(5)求导可得机构速度映射模型副个数为3,其中移动副9主要起导向和增加承载··x-r/2r/2éθù1能力的作用,为虚约束,移动副12、14之中也有1个=êú(7)[]·[-r/2-r/2]ê·ú为虚约束,因此去除虚约束后低副个数PL=9。高yëθ2û副个数等于“等效高副”的个数,即PH=7,局部自由故机构的Jacobian矩阵为度个数F'=0。根据平面机构自由度计算公式,该-r/2r/2J=[](8)机构的自由度为-r/2-r/2F=3N-(2PL+PH)-F'=2(1)现以Jacobian矩阵的条件数κ作为机构的局部[15]1.3位置正解运动学性能指标,求得该矩阵在二范数下的条件如图1所示,选择左端的两个带轮M1、M2作为数为-1驱动轮,两个驱动轮的角位移θ1、θ2作为系统输入,κ=cond(J)=‖J‖2‖J‖2≡1取滑块上一定点在OXY平面内的坐标x、y作为系Jacobian矩阵的条件数越接近于1,机构各向同统输出。取动轮半径为r,规定图示顺时针转动方性性能越好,同时其灵活性及力学性能也越优越。向为正方向。输入坐标空间为Oθ1θ2,输出(工作)由于H形并联机构Jacobian矩阵的条件数恒等于坐标空间为OXY。1,因此,该机构没有奇异位形,且在工作空间的各个由于带轮M1、M2在Oθ1θ2坐标空间中各自的位形均具有优越的各向同性性能、良好的灵活性和运动是独立的,根据运动学叠加原理,机构在OXY力学性能。坐标空间下的输出可以看作由带轮M1、M2各自的2.2可达工作空间运动经过机构变换后叠加而成。这样,如果M1、M2机构的可达工作空间是指机构末端参考点所能、Δθ,机构输出的[16]同时转动,所转过角度分别为Δθ12达到的空间点的集合。根据以上对H形并联机求解可分以下步骤:构的描述,本文讨论的机构的可达工作空间是指滑(1)带轮M2不动,带轮M1转过角度Δθ1,经分块上一定点在OXY平面内所能到达的空间点的集合。\n326农业机械学报2014年由式(5)可知,该机构拥有广阔的连续工作空由此可得,从输出坐标x、y到输入坐标θ1、θ2间,可以覆盖机构两平行导轨间的大部分位置(除所经历的变换为:旋转变换(逆时针135°)、伸缩变去两端有机械干涉的位置),如图3所示。并且,该换(各方向缩放比例相同,均为槡2/r)。机构在可达工作空间内的所有位形其Jacobian矩阵所以,从输出坐标到机构输入坐标的变换仅仅的条件数都等于1,即具有良好的灵活性和力学性为位置的旋转和各方向的等比例缩放,变换前后的能,由此克服了大部分并联机构工作空间狭小及存坐标轨迹具有几何相似性,即直线变换后仍为直线,在某些奇异位形的缺点。圆变换后仍为圆,其他形式的几何曲线亦如此。值得注意的是在机构坐标变换中很少涉及伸缩变换,但该并联机构具有伸缩变换的特点。3.2速度及加速度关系对式(6)求导可得速度逆解模型·éθù-1/r-1/r·x1êú=(12)ê·ú[1/r-1/r][]·ëθ2ûy再对式(12)求导可得加速度逆解模型图3可达工作空间示意图··Fig.3WorkspaceoftheH-shapedparallelmechanisméθù-1/r-1/r··x1êú=(13)ê··ú[1/r-1/r][]··3运动特性分析及精插补控制策略ëθ2ûy由式(12)及式(13)可得3.1齐次坐标变换及矩阵分解·2·2槡2·2·2为便于进一步分析,把式(6)写成齐次坐标[17]槡θ1+θ2=槡x+y(14)r的形式··2··2槡2··2··2θ1-1/r-1/r0x槡θ1+θ2=r槡x+y(15)éùéùéùêθ2ú=ê1/r-1/r0úêyú(9)···2·222êúêúêú令ω=槡θ1+θ2v=槡x+yë1ûë001ûë1û··2··2··2··2é-1/r-1/r0ùα=槡θ1+θ2a=槡x+y令A=ê1/r-1/r0ú易知ω、v分别为机构输入、输出的合速度;α、aêúë001û分别为机构输入、输出的合加速度。由此可得输入对A进行矩阵分解得与输出的合速度及合加速度的关系为é槡2/r00ùécos135°-sin135°0ùω=槡2v(16)A=êúêsin135°cos135°0úrêê0槡2/r0úúêúë001ûë001ûα=槡2a(17)r(10)3.3精插补控制策略令é槡2/r00ù基于以上分析,对该机构进行精插补控制时,可êúS=ê0槡2/r0ú以采用以下两种方式实现:êúë001û(1)开发专用运动控制器écos135°-sin135°0ù可使用ARM或DSP等芯片为该机构开发专用R=êsin135°cos135°0ú的运动控制器,把上述机构的算法模型集成在硬件êúë001û中,在硬件中编写坐标转换程序及插补程序实现对则式(9)可写成机构的精插补控制。éθ1ùéxù(2)使用通用运动控制器êθ2ú=SRêyú(11)由3.1节分析可知,机构输出坐标轨迹与输入êúêúë1ûë1û坐标轨迹之间具有几何相似的特点,这样,如果要在式中R———旋转变换矩阵输出坐标系内输出直线或圆弧,则只需把目标直线S———伸缩变换矩阵或圆弧在输出坐标系下的插补特征参数按以上相应\n第11期杨继东等:H形并联机构运动学分析与样机精插补控制实验327的公式变换,然后使用变换后的特征参数作为通用文字和图案,在UGCAM模块中生成相应的NC代运动控制器的输入,在运动控制器中调用相应的直码载入设备中运行,进行连续插补作图实验。实验线或圆弧插补函数即可。使用通用的运动控制器做结果验证了对机构所建立模型的正确性。插补控制时,一般只需设定一些几何特征参数和插为测试其插补速度和插补加速度特性,使机构补速度及加速度参数,插补几何特征参数可由以梯形速度曲线执行直线插补,测量其匀速阶段的式(6)确定,插补速度及加速度分别由式(16)、(17)速度和匀加速阶段的加速度。在确定了欲输出的目确定。标速度和目标加速度后,输入侧两电动机的插补速所以,经过简单的数学变换便可以使用任何一度及加速度由式(16)、(17)确定。机构实际输出的款具有精插补能力的运动控制器完成机构的精插补插补速度和加速度的测量方法为:首先对磁栅尺所[18]控制,而无需为该机构开发专用的控制器和编写专测得的位移数据点进行移动多项式拟合,然后求门的插补程序,即可达到硬件插补(精插补)的精取拟合曲线中心点的一阶和二阶导数即得速度和加度。速度。实测结果如表1所示,测试数据验证了速度及加速度关系模型的正确性。4样机实验表1插补速度、加速度特性测试结果为验证以上所建立模型的正确性,设计制作了Tab.1ResultofinterpolationvelocityandH形并联机构的样机进行实验。样机照片如图4所interpolationaccelerationpropertytest示。为实现Z方向的运动,可在滑块上安装一个电目标速度/实测速度/目标加速度/实测加速度/-1-1-2-2动缸或气缸,本样机采用气缸,并在气缸末端安装气(mm·s)(mm·s)(mm·s)(mm·s)爪,以实现物体夹持。300296.6~303.7300294.7~306.1500496.2~504.5500494.3~507.51000993.4~1006.31000989.9~1007.7图5、6、7为插补运动控制部分实验照片,实验结果表明样机执行插补指令时轨迹连续流畅,可高速、精确地进行直线、圆弧的连续插补。图4H形并联机构样机Fig.4ModelmachineoftheH-shapedparallelmechanism运动控制系统采用通用的运动控制器,系统硬件为:工控机+PCI运动控制卡+数字量IO卡。所用工控机为研华IPC-610,运动控制卡为雷赛DMC5480,数字量IO卡为研华PCI-1730。伺服电机采用三菱HC-KFS系列,伺服驱动器为三菱M2-JS-图5直线/圆弧插补实验结果40A。位移测量工具为高精度磁栅尺(意大利Fig.5Resultofline/circleinterpolationGIVI)。5结论上位机控制软件采用VB开发,系统可完成点位控制、直线/圆弧插补功能,并支持NC代码,具有(1)对一种同步齿形带传动的2自由度并联机简易的数控系统功能。由于大部分运动控制卡都不构———H形并联机构进行了运动学分析,求出了机支持NC代码,本系统开发了NC代码翻译程序,把构的自由度,采用运动学叠加原理推导出了该机构NC代码翻译为DMC5480可以识别的运动控制函的位置正解和逆解,并求出了机构的Jacobian矩阵数,从而使系统具有简易数控功能。的条件数,在此基础上对其进行了运动学性能评价、在此基础上,对样机进行了精确定位实验、直线可达工作空间分析。计算结果表明该机构具有良好插补实验、圆弧插补实验,并用UG软件设计了一些的各向同性、灵活性及力学性能,并具有广阔的工作\n328农业机械学报2014年图6NC代码写字实验结果Fig.6ResultofNCwriting空间。图7NC代码作图实验结果(2)采用矩阵分解和齐次坐标变换对机构位置Fig.7ResultofNCdrawing正逆解结果进行进一步分析,求解结果表明该机构从输入到输出之间历经了坐标旋转变换和伸缩变换(3)制作了该机构的样机,在基于IPC+运动控(且各方向缩放比例相同),由此得出输入与输出轨制卡的平台下开发了该样机的上位机控制软件,并迹之间具有几何相似性的结论,并推导出了输入与编写了NC代码翻译器,使该设备可以执行通用的输出之间插补合速度、合加速度之间的关系。在此NC代码。在此基础上进行了精确定位、直线/圆弧基础上,提出了利用通用插补运动控制器实现对该插补及NC代码连续插补作图实验,实验结果证实机构进行精插补控制的方法。了机构所建数学模型的正确性。参考文献1ClavelR.Deviceforthemovementandpositioningofanelementinspace:USA,US4976582[P].1990-12-11.2StewartD.Aplatformwithsixdegreesoffreedom[J].ProceedingsoftheInstituteofMechanicalEngineers,1965,180(1):371-3853ChungYoungHoon,LeeJaeWon.Designofanew2DOFparallelmechanism[C]∥Proceedingsof2001IEEE/ASMEInternationalConferenceonAdvancedIntelligentMechatronics,2001,1:129-134.4张利敏,梅江平,赵学满,等.一种二平动自由度并联机械手动力尺度综合[J].天津大学学报,2010,43(8):661-666.ZhangLimin,MeiJiangping,ZhaoXueman,etal.Dynamicdimensionalsynthesisofa2-DOFtranslationalparallelmanipulatorforpick-and-placeoperations[J].JournalofTianjinUniversity,2010,43(8):661-666.(inChinese)5袁剑锋,张宪民.一种新型两自由度高速并联机械手的尺度综合[J].华南理工大学学报:自然科学版,2007,35(12):39-44.YuanJianfeng,ZhangXianmin.Dimensionalsynthesisofanovel2-DOFhigh-speedparallelmanipulator[J].JournalofSouthChinaUniversityofTechnology,2007,35(12):39-44.(inChinese)6张彦斌,吴鑫,刘宏昭,等.一种新型并联机器人机构的运动分析及完全各向同性设计[J].中国机械工程,2008,19(2):213-216.ZhangYanbin,WuXin,LiuHongzhao,etal.Kinematicsanalysisandfully-isotropicdesignofanovelparallelroboticmanipulator[J].ChinaMechanicalEngineering,2008,19(2):213-216.(inChinese)7XieFugui,LiuXinjun,WangLiping,etal.Optimumkinematicdesignofthe4R2-DOFparallelmechanism[J].TsinghuaScienceandTechnology,2009,14(5):663-668.8LiuXinjun,TangXiaoqiang,WangJinsong.Anovel2-DOFparallelmechanismbaseddesignofanew5-axishybridmachinetool[C]∥2003IEEEInternationalConferenceonRobotics&Automation,2003,3:3990-3995.9沈惠平,丁磊,邓嘉鸣,等.大范围作业数控型二自由度并联操作手及其运动特性的研究[J].中国机械工程,2010,21(22):2734-2739.ShenHuiping,DingLei,DengJiaming,etal.Researchonanovel2-DOFNCparallelmanipulatorwithlargeworkspaceanditsmotioncharacteristic[J].ChinaMechanicalEngineering,2010,21(22):2734-2739.(inChinese)10张彦斌,张树乾,吴鑫.3-CRPa移动并联机构运动学分析与仿真[J].农业机械学报,2012,43(7):200-205.ZhangYanbin,ZhangShuqian,WuXin.Kinematicanalysisandsimulationof3-CRPatranslationalparallelmechanism[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2012,43(7):200-205.(inChinese)11崔国华,周海栋,王南,等.基于Isight的3-UPS-S并联机器人机构多目标优化[J].农业机械学报,2013,44(9):261-266.CuiGuohua,ZhouHaidong,WangNan,etal.Multi-objectiveoptimizationof3-UPS-Sparallelmechanismbasedonisight[J].\n第11期杨继东等:H形并联机构运动学分析与样机精插补控制实验329TransactionsoftheChineseSocietyforAgriculturalMachinery,2013,44(9):261-266.(inChinese)12ZengDaxing,HuangZhen,WenJuanlu.Afamilyofnovel2DOFrotationaldecoupledparallelmechanisms[C]∥InternationalConferenceonMechatronicsandAutomation,2007:2478-2483.13刘辛军,汪劲松,李剑锋,等.一种新型空间3自由度并联机构的正反解及工作空间分析[J].机械工程学报,2001,37(10):36-39.LiuXinjun,WangJinsong,LiJianfeng,etal.Ontheworkspaceofanovelspatial3-DOFparallelmanipulator[J].ChineseJournalofMechanicalEngineering,2001,37(10):36-39.(inChinese)14梅江平,高奔,谭杨,等.3-SPR并联机构运动学分析[J].农业机械学报,2012,33(8):215-220.MeiJiangping,GaoBen,TanYang,etal.Kinematicanalysisof3-SPRparallelmechanism[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2012,33(8):215-220.(inChinese)15GosselinC,AngelesJ.Globalperformanceindexforthekinematicoptimizationofroboticmanipulators[J].ASMEJournalofMechanicalDesign,1991,113(3):220-226.16GuoJianye,LiuYongxian,ShiJiashun,etal.ComputersimulationanalysisfortheprocessingdexterityofparallelkinematicmachinebasedonMatlab[C]∥Proceedingsofthe38thInternationalConferenceonComputersandIndustrialEngineering,2008:859-864.17张雪峰,徐心和.齐次变换的数学性质及其在机器人运动学分析中的应用[J].机器人,2003,25(7):686-691.ZhangXuefeng,XuXinhe.Charactersoftransformationofhomogeneouscoordinatesandtheirapplicationintheanalysisofrobotkinematics[J].Robot,2003,25(7):686-691.(inChinese)18郑奕,张晓林.移动平滑算法在无人机遥测数据处理中的应用[J].北京航空航天大学学报,2003,29(4):350-353.ZhengYi,ZhangXiaolin.Moving-polynomialsmootheralgorithmfortelemetryflight-testdataprocessingofpilotlesshelicopter[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2003,29(4):350-353.(inChinese)KinematicAnalysisandExperimentofH-shapedParallelMechanismYangJidongYangZhongshanLiuDongLiuHao(SchoolofMechanicalEngineering,ChongqingUniversity,Chongqing400044,China)Abstract:ThroughkinematicanalysisoftheH-shapedparallelmechanism,thedegreeoffreedomwasderived.Theinverseandforwardpositionmodelofthismechanismwereestablishedbyemployingkinematicsuperpositionprincipleandtheanalyticalsolutionwasobtained.TheconditionnumberofJacobianmatrixwasderivedandtheworkspacewasanalysed.Theresultofthecalculationshowsthatthismechanismhadperfectisotropicpropertiesandspeciousworkspace.Furtheranalysisoftheinversepositionsolutionadoptinghomogeneoustransformationandmatrixdecompositionindicatedthatthetrajectorybetweentheinputandoutputcoordinatewasgeometricallysimilar.Basedonthat,acontrolstrategyforfineinterpolationonlyusinggeneralmotioncontrollerwasproposed.Amodelmachinewasdevelopedandaseriesofexperimentswerecarriedout,suchasline/circleinterpolation,continuousinterpolationandetc.Theresultssuggestthatthemathematicalmodelestablishedforthisparallelmechanismwascorrect.Keywords:Parallelmechanism2-DOFKinematicanalysisFineinterpolationmotioncontrol