

- 671.34 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
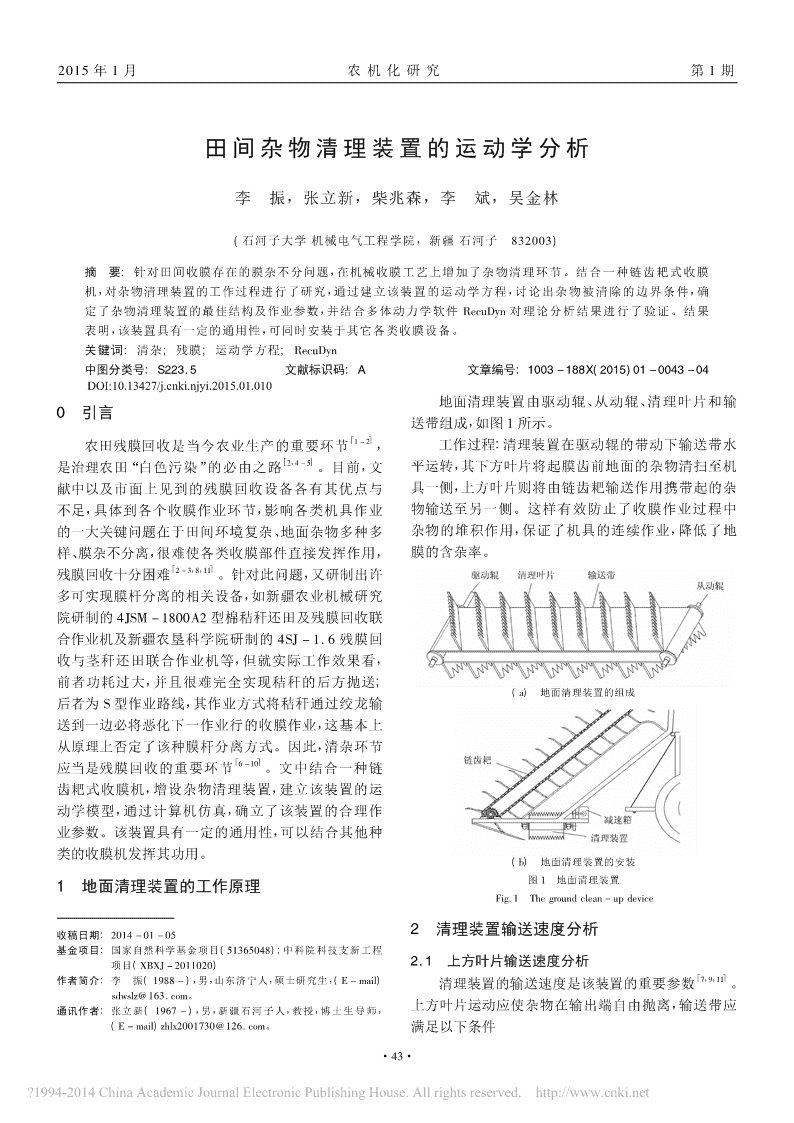
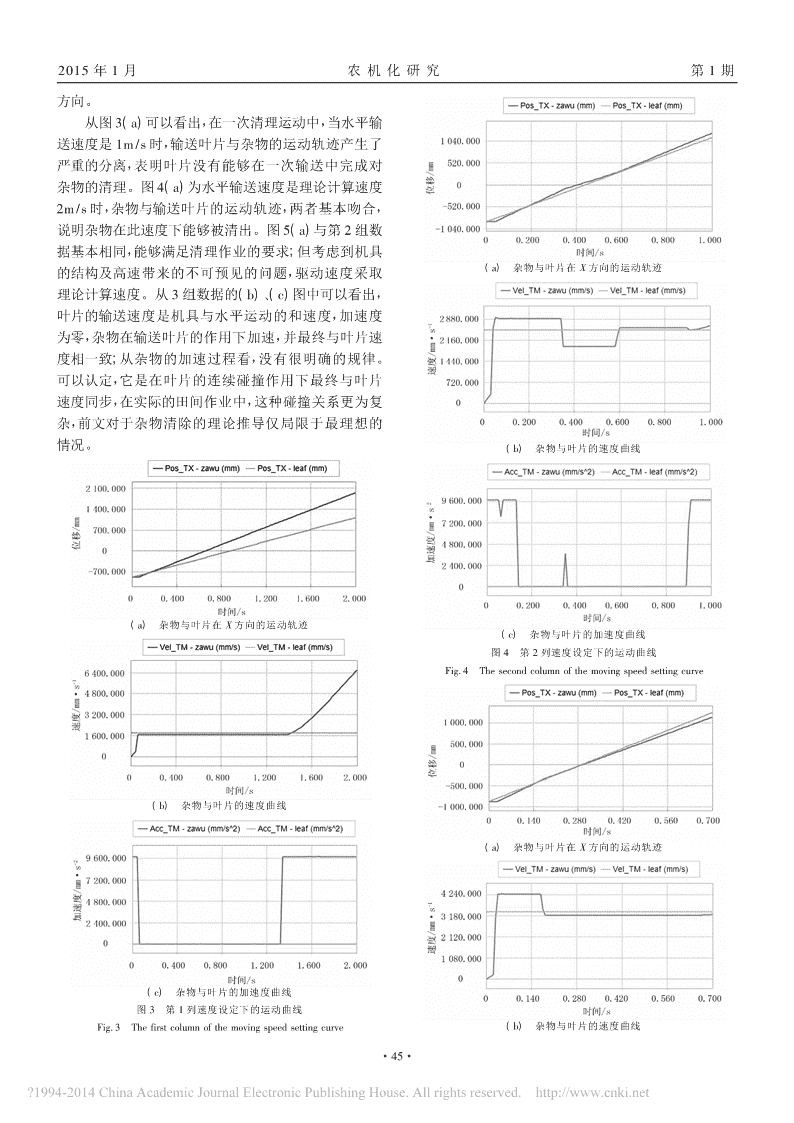
2015年1月农机化研究第1期田间杂物清理装置的运动学分析李振,张立新,柴兆森,李斌,吴金林(石河子大学机械电气工程学院,新疆石河子832003)摘要:针对田间收膜存在的膜杂不分问题,在机械收膜工艺上增加了杂物清理环节。结合一种链齿耙式收膜机,对杂物清理装置的工作过程进行了研究,通过建立该装置的运动学方程,讨论出杂物被清除的边界条件,确定了杂物清理装置的最佳结构及作业参数,并结合多体动力学软件RecuDyn对理论分析结果进行了验证。结果表明,该装置具有一定的通用性,可同时安装于其它各类收膜设备。关键词:清杂;残膜;运动学方程;RecuDyn中图分类号:S223.5文献标识码:A文章编号:1003-188X(2015)01-0043-04DOI:10.13427/j.cnki.njyi.2015.01.010地面清理装置由驱动辊、从动辊、清理叶片和输0引言送带组成,如图1所示。[1-2]农田残膜回收是当今农业生产的重要环节,工作过程:清理装置在驱动辊的带动下输送带水[2,4-5]是治理农田“白色污染”的必由之路。目前,文平运转,其下方叶片将起膜齿前地面的杂物清扫至机献中以及市面上见到的残膜回收设备各有其优点与具一侧,上方叶片则将由链齿耙输送作用携带起的杂不足,具体到各个收膜作业环节,影响各类机具作业物输送至另一侧。这样有效防止了收膜作业过程中的一大关键问题在于田间环境复杂、地面杂物多种多杂物的堆积作用,保证了机具的连续作业,降低了地样、膜杂不分离,很难使各类收膜部件直接发挥作用,膜的含杂率。[2-3,8,11]残膜回收十分困难。针对此问题,又研制出许多可实现膜杆分离的相关设备,如新疆农业机械研究院研制的4JSM-1800A2型棉秸秆还田及残膜回收联合作业机及新疆农垦科学院研制的4SJ-1.6残膜回收与茎秆还田联合作业机等,但就实际工作效果看,前者功耗过大,并且很难完全实现秸秆的后方抛送;(a)地面清理装置的组成后者为S型作业路线,其作业方式将秸秆通过绞龙输送到一边必将恶化下一作业行的收膜作业,这基本上从原理上否定了该种膜杆分离方式。因此,清杂环节[6-10]应当是残膜回收的重要环节。文中结合一种链齿耙式收膜机,增设杂物清理装置,建立该装置的运动学模型,通过计算机仿真,确立了该装置的合理作业参数。该装置具有一定的通用性,可以结合其他种类的收膜机发挥其功用。(b)地面清理装置的安装图1地面清理装置1地面清理装置的工作原理Fig.1Thegroundclean-updevice2清理装置输送速度分析收稿日期:2014-01-05基金项目:国家自然科学基金项目(51365048);中科院科技支新工程项目(XBXJ-2011020)2.1上方叶片输送速度分析作者简介:李振(1988-),男,山东济宁人,硕士研究生,(E-mail)清理装置的输送速度是该装置的重要参数[7,9,11]。sdwslz@163.com。上方叶片运动应使杂物在输出端自由抛离,输送带应通讯作者:张立新(1967-),男,新疆石河子人,教授,博士生导师,(E-mail)zhlx2001730@126.com。满足以下条件·43·\n2015年1月农机化研究第1期2mrω≥mgcosα(1)dxFx-fx=vx=·t其中,m为杂物的质量;r为驱动辊半径;ω为驱dtm(9)动辊角速度;g为重力加速度;α为输送带倾角。因此{dyFy+fy5=vy=·t-1.dtm有对t二次积分得gcosαω≥(2)(F-f)槡rxx2x=·t+C22m因vs=rω,则(10){(Fy+fy)2vs=槡rgcosα(3)y=·t-1.5t+D22m该输送装置为水平输送,既α=0,所以有当t=0时,x=0m,y=0m,由式(10)得vmin≥槡rg(4)(Fx-fx)2x=·t其中,vmin为上方输送带的最低速度。2m(11)取r=0.03m代入式(4)得vmin=0.54m/s。即就{(Fy+fy)2ty=·t-1.5上叶片输送过程,输送带的最低速度应大于0.54m/s。2m2.2下方叶片清扫速度分析根据单位作业面积内的杂物的质量测定数值以及为保证地面清理装置下方清扫作业效果,其水平图2各变量之间的关系可得到:m=2kg,Fy=cosα,Fx[5,10-11]运动速度与机具前进速度密切相关,杂物在此=Fsinα,fx=Fμcosα,fy=Fμsinα,其中μ=1,α=75°。[7,11]过程中的受力情况如图2所示。杂物能够被顺利清出作业区域的条件:当杂物在机具前进方向上的运动距离与机具前进距离之差小于等于输送带宽度b的作业时间内,输送带能够将杂物在水平方向上输送作业幅宽l0的距离,即式(11)中x=l0=1.3m,y≤b,b=0.28m。将各变量代入式(11),可以求得作用力F∈[2.57,4.24]N;同时,可以求得杂物水平清出作业区域的速度为vx∈[1.5,2]m/s。根据田间实际工作情况,水平输送带的作业速度尽可能取较大值,确定为2m/s。v为机具前进速度,vH为水平输送速度,l0为水平输送带长度,b为输送带宽度,F为叶片对杂物的垂直作用力,3基于RecuDyn的输送带仿真Fx、Fy为F在水平和垂直方向上的分力,f为杂物沿叶片方向上的摩擦力,α为叶片倾角。根据对清理装置输送带的理论分析,结合多体动图2清理叶片对杂物的作用力力学仿真软件RecuDyn,对输送过程中杂物的运动轨Fig.2Theforceofsweepingbladesonthedebris机具的作业速度取1.5m/s,以机具作为参考系建迹以及输送带的运动情况进行模拟仿真,验证理论计立杂物被清出的运动学方程为算速度条件下,杂物被清出的实际运动轨迹及通过设→→→定相邻两个清理叶片水平和前进方向的速度得出杂ma=F+f(5)物的清出轨迹。叶片水平及前进方向的速度分别按2dvdxxm2=m=Fx-fx表1设定,中间速度设定为理论计算速度2m/s和1.5dtdt(6)2m/s。{dydvym2=m=Fy+fy表1平带仿真运动速度dtdtTable1Flatbeltmovingspeedofthesimulationm/s对t一次积分得机具前进速度水平输送速度mvx=(Fx-fx)·t+C1{(7)11.51mvy=(Fy+fy)·t+D121.52当t=0时,vx=0m/s,vy=-1.5m/s,由式(7)得31.53{mvx=(Nx-fx)·t按照表1中3种速度进行仿真,仿真结果如图3、m(8)mvy=(Ny+fy)·t-1.5图4、图5所示。其中,坐标X方向表示输送带的清理·44·\n2015年1月农机化研究第1期方向。从图3(a)可以看出,在一次清理运动中,当水平输送速度是1m/s时,输送叶片与杂物的运动轨迹产生了严重的分离,表明叶片没有能够在一次输送中完成对杂物的清理。图4(a)为水平输送速度是理论计算速度2m/s时,杂物与输送叶片的运动轨迹,两者基本吻合,说明杂物在此速度下能够被清出。图5(a)与第2组数据基本相同,能够满足清理作业的要求;但考虑到机具(a)杂物与叶片在X方向的运动轨迹的结构及高速带来的不可预见的问题,驱动速度采取理论计算速度。从3组数据的(b)、(c)图中可以看出,叶片的输送速度是机具与水平运动的和速度,加速度为零,杂物在输送叶片的作用下加速,并最终与叶片速度相一致;从杂物的加速过程看,没有很明确的规律。可以认定,它是在叶片的连续碰撞作用下最终与叶片速度同步,在实际的田间作业中,这种碰撞关系更为复杂,前文对于杂物清除的理论推导仅局限于最理想的情况。(b)杂物与叶片的速度曲线(a)杂物与叶片在X方向的运动轨迹(c)杂物与叶片的加速度曲线图4第2列速度设定下的运动曲线Fig.4Thesecondcolumnofthemovingspeedsettingcurve(b)杂物与叶片的速度曲线(a)杂物与叶片在X方向的运动轨迹(c)杂物与叶片的加速度曲线图3第1列速度设定下的运动曲线Fig.3Thefirstcolumnofthemovingspeedsettingcurve(b)杂物与叶片的速度曲线·45·\n2015年1月农机化研究第1期Nigeria[J].SoilandTillageResearch,2007,93(2):264-272.[2]MahajanG,ShardaR,KumarA,etal.Effectofplasticmulchoneconomizingirrigationwaterandweedcontrolinbabycornsownbydifferentmethods[J].AfricanJournalofAgriculturalResearch,2007,2(1):19-26.[3]陈发,史建新,王学农,等.弧型齿残膜捡拾滚筒捡膜的机理[J].农业机械学报,2006,37(6):36-41.[4]HUXiao-tang,CHENHu.EffectsofSoilWaterContenton(c)杂物与叶片的加速度曲线CottonRootGrowthandDistributionUnderMulchedDripIrri-图5第3列速度设定下的运动曲线gation[J].AgriculturalSciencesinChina,2009,8(6):709Fig.5Thethirdcolumnofthemovingspeedsettingcurve-716.4结论[5]LiFM,WangJ,XuJZ,etal.Productivi-tyandsoilre-sponsetoplasticfilmmulchingdurationsforspringwheaton针对残膜回收机收膜作业存在的问题,提出在作EntisolsinthesemiaridLoessPlateauofChina[J].SoilTill.业工艺上增设清杂环节,结合一种链齿耙式收膜机增Res,2004,78(1):9-20.加秸秆清理作业装置,覆盖于地膜表层的杂物被输送[6]张惠友,侯书林,那明君,等.残膜回收工艺和收膜机构到机具的一侧,为收膜作业创造出良好的收膜环境。[J].农机化研究,2004(6):72-73.通过对清理装置结构形式的分析,建立了杂物被[7]曹肆林,王序俭.4SJ-1.6残膜回收与茎秆粉碎联合作清出作业区域的运动学方程,确定出杂物被清出作业业机的研制[J].新疆农机化,2009(1):25,31.[8]侯书林,胡三援,孔建铭,等.国内残膜回收机现状研究区域的边界条件,最终得出理论计算条件下的水平输[J].农业工程学报,2002,18(3):186-190.送速度为2m/s,叶片倾角75°。在该计算结果的基础[9]LIZhi-Guo,ZHANGRun-Hua,WANGXiu-Jun.Carbon上,通过多体动力学软件RecurDyn对杂物清出的运动DioxideFluxesandConcentrationsinaCottonFieldin轨迹、运动速度及加速度情况进行了仿真,仿真结果NorthwesternChina:Effec-tsofPlasticMulchingandDrip-与理论计算结果基本一致。Irrigation[J].Pedos-phere,2011,21(2):178-185.参考文献:[10]娄秀华,张东兴,耿端阳,等.残膜回收机起膜器的设计[1]AnikweMAN,MbahCN,EzeakuPI,etal.Tillageand与试验研究[J].农业工程学报,2002,18(6):88-90.plasticmulcheffectsonsoilpropertiesandgrowthandyield[11]马少辉,张学军.边膜残膜回收机的设计与试验[J].农ofcocoyam(Colocasiaesculenta)onanultisolinsoutheastern业工程学报,2012,2(1):73-75.KinematicAnalysisofFarmlandDebrisClean-upDeviceLiZhen,ZhangLixin,ChaiZhaosen,LiBin,WuJinlin(CollegeofMechanicalandElectricalEngineering,ShiheziUniversity,Shihezi832003,China)Abstract:Fortheproblemthatfilmmixedwithdebrisinthefield.Mechanicalclosingfilmprocessshouldincreasethedebrisclean-uplink.Combinedwithachaintoothrakeclosingfilmequipment,debrisclean-updevicewasre-searched.Throughthedevicekinematicequations,theboundaryconditionsthatdebriscanbecleanedoutwasget.Deter-minethebeststructureandoperationalparametersofthedebrisclean-updevice.Combinedmulti-bodydynamicssoft-wareRecuDyntovalidatethetheoreticalanalysis.Toacertainextent,thedeviceisversatilitywhichcanbeusedinsomeotherclosingfilmequipment.Keywords:plasticfilm;debrisclean-up;kinematicequations;RecuDyn·46·