

- 882.31 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
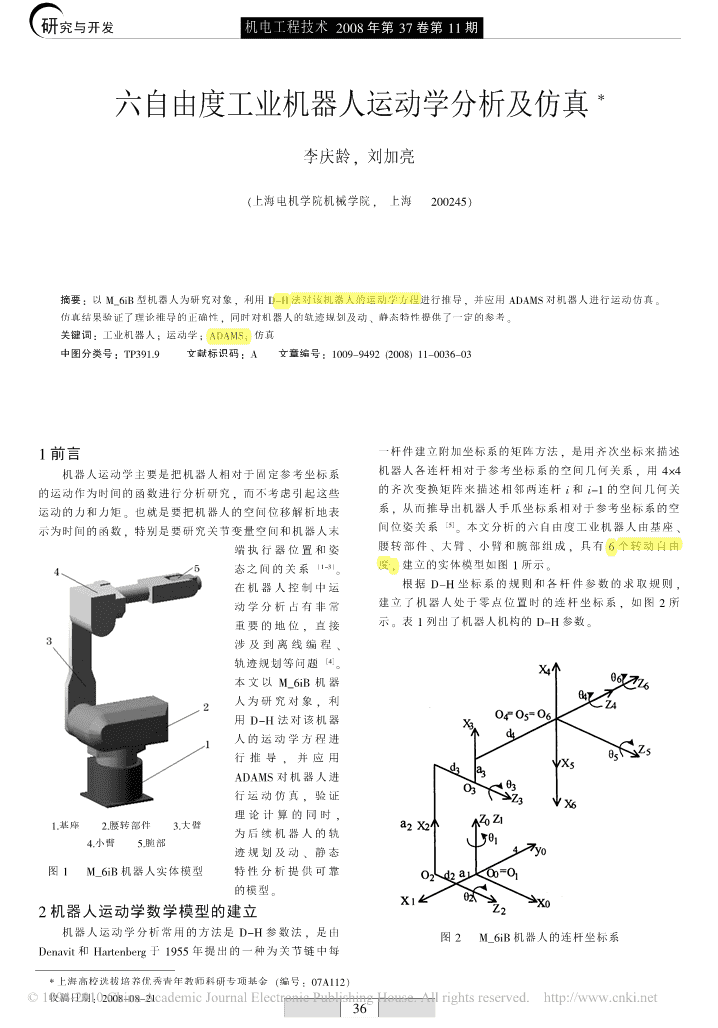
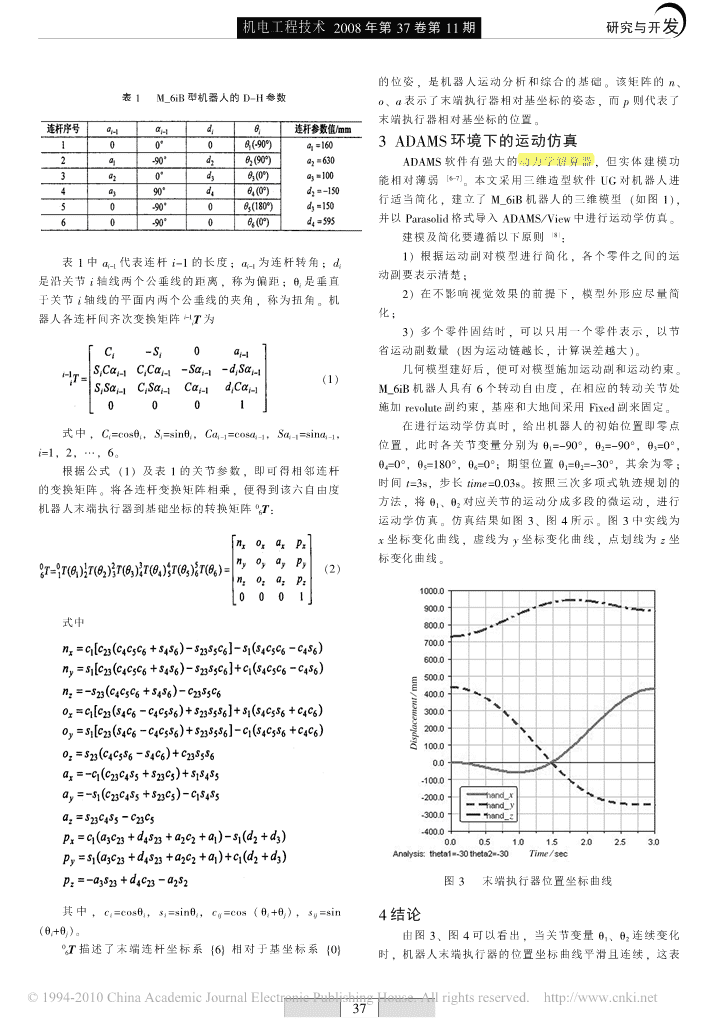
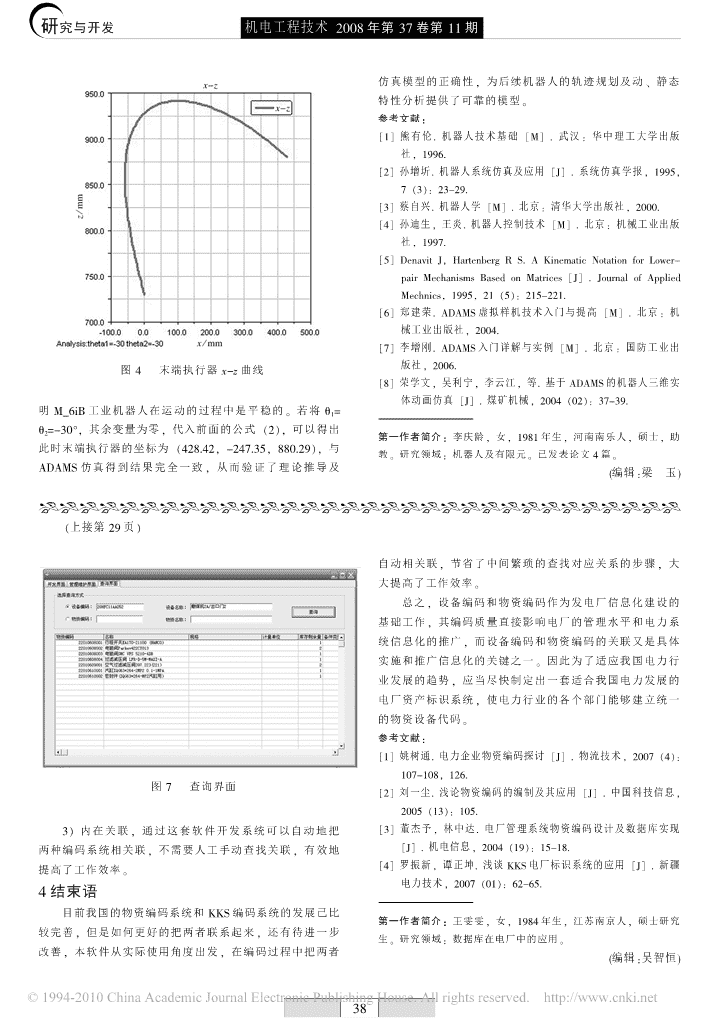
研究与开发机机电工程技术电工程技术2008年第37卷第11期六自由度工业机器人运动学分析及仿真觹李庆龄,刘加亮(上海电机学院机械学院,上海200245)摘要:以M_6iB型机器人为研究对象,利用D-H法对该机器人的运动学方程进行推导,并应用ADAMS对机器人进行运动仿真。仿真结果验证了理论推导的正确性,同时对机器人的轨迹规划及动、静态特性提供了一定的参考。关键词:工业机器人;运动学;ADAMS;仿真中图分类号:TP391.9文献标识码:A文章编号:1009-9492(2008)11-0036-031前言一杆件建立附加坐标系的矩阵方法,是用齐次坐标来描述机器人运动学主要是把机器人相对于固定参考坐标系机器人各连杆相对于参考坐标系的空间几何关系,用4×4的运动作为时间的函数进行分析研究,而不考虑引起这些的齐次变换矩阵来描述相邻两连杆i和i-1的空间几何关运动的力和力矩。也就是要把机器人的空间位移解析地表系,从而推导出机器人手爪坐标系相对于参考坐标系的空间位姿关系[5]。本文分析的六自由度工业机器人由基座、示为时间的函数,特别是要研究关节变量空间和机器人末端执行器位置和姿腰转部件、大臂、小臂和腕部组成,具有6个转动自由态之间的关系[1-3]。度,建立的实体模型如图1所示。在机器人控制中运根据D-H坐标系的规则和各杆件参数的求取规则,动学分析占有非常建立了机器人处于零点位置时的连杆坐标系,如图2所重要的地位,直接示。表1列出了机器人机构的D-H参数。涉及到离线编程、轨迹规划等问题[4]。本文以M_6iB机器人为研究对象,利用D-H法对该机器人的运动学方程进行推导,并应用ADAMS对机器人进行运动仿真,验证理论计算的同时,1.基座2.腰转部件3.大臂为后续机器人的轨4.小臂5.腕部迹规划及动、静态图1M_6iB机器人实体模型特性分析提供可靠的模型。2机器人运动学数学模型的建立机器人运动学分析常用的方法是D-H参数法,是由图2M_6iB机器人的连杆坐标系Denavit和Hartenberg于1955年提出的一种为关节链中每觹上海高校选拔培养优秀青年教师科研专项基金(编号:07A112)收稿日期:2008-08-2136\n机机电工程技术电工程技术2008年第37卷第11期研究与开发的位姿,是机器人运动分析和综合的基础。该矩阵的n、表1M_6iB型机器人的D-H参数o、a表示了末端执行器相对基坐标的姿态,而p则代表了末端执行器相对基坐标的位置。3ADAMS环境下的运动仿真ADAMS软件有强大的动力学解算器,但实体建模功能相对薄弱[6-7]。本文采用三维造型软件UG对机器人进行适当简化,建立了M_6iB机器人的三维模型(如图1),并以Parasolid格式导入ADAMS/View中进行运动学仿真。建模及简化要遵循以下原则[8]:1)根据运动副对模型进行简化,各个零件之间的运表1中ai-1代表连杆i-1的长度;ai-1为连杆转角;di动副要表示清楚;是沿关节i轴线两个公垂线的距离,称为偏距;θi是垂直2)在不影响视觉效果的前提下,模型外形应尽量简于关节i轴线的平面内两个公垂线的夹角,称为扭角。机i-1化;器人各连杆间齐次变换矩阵iT为3)多个零件固结时,可以只用一个零件表示,以节省运动副数量(因为运动链越长,计算误差越大)。几何模型建好后,便可对模型施加运动副和运动约束。(1)M_6iB机器人具有6个转动自由度,在相应的转动关节处施加revolute副约束,基座和大地间采用Fixed副来固定。在进行运动学仿真时,给出机器人的初始位置即零点式中,Ci=cosθi,Si=sinθi,Cai-1=cosai-1,Sai-1=sinai-1,位置,此时各关节变量分别为θ1=-90°,θ2=-90°,θ3=0°,i=1,2,…,6。θ4=0°,θ5=180°,θ6=0°;期望位置θ1=θ2=-30°,其余为零;根据公式(1)及表1的关节参数,即可得相邻连杆时间t=3s,步长time=0.03s。按照三次多项式轨迹规划的的变换矩阵。将各连杆变换矩阵相乘,便得到该六自由度0方法,将θ1、θ2对应关节的运动分成多段的微运动,进行机器人末端执行器到基础坐标的转换矩阵6T:运动学仿真。仿真结果如图3、图4所示。图3中实线为x坐标变化曲线,虚线为y坐标变化曲线,点划线为z坐标变化曲线。(2)式中图3末端执行器位置坐标曲线其中,ci=cosθi,si=sinθi,cij=cos(θi+θj),sij=sin4结论(θi+θj)。由图3、图4可以看出,当关节变量θ1、θ2连续变化0T描述了末端连杆坐标系邀6妖相对于基坐标系邀0妖6时,机器人末端执行器的位置坐标曲线平滑且连续,这表37\n研究与开发机机电工程技术电工程技术2008年第37卷第11期仿真模型的正确性,为后续机器人的轨迹规划及动、静态特性分析提供了可靠的模型。参考文献:[1]熊有伦.机器人技术基础[M].武汉:华中理工大学出版社,1996.[2]孙增圻.机器人系统仿真及应用[J].系统仿真学报,1995,7(3):23-29.[3]蔡自兴.机器人学[M].北京:清华大学出版社,2000.[4]孙迪生,王炎.机器人控制技术[M].北京:机械工业出版社,1997.[5]DenavitJ,HartenbergRS.AKinematicNotationforLower-pairMechanismsBasedonMatrices[J].JournalofAppliedMechnics,1995,21(5):215-221.[6]郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2004.[7]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.图4末端执行器x-z曲线[8]荣学文,吴利宁,李云江,等.基于ADAMS的机器人三维实体动画仿真[J].煤矿机械,2004(02):37-39.明M_6iB工业机器人在运动的过程中是平稳的。若将θ1=θ2=-30°,其余变量为零,代入前面的公式(2),可以得出第一作者简介:李庆龄,女,1981年生,河南南乐人,硕士,助此时末端执行器的坐标为(428.42,-247.35,880.29),与教。研究领域:机器人及有限元。已发表论文4篇。ADAMS仿真得到结果完全一致,从而验证了理论推导及(编辑:梁玉)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!(上接第29页)自动相关联,节省了中间繁琐的查找对应关系的步骤,大大提高了工作效率。总之,设备编码和物资编码作为发电厂信息化建设的基础工作,其编码质量直接影响电厂的管理水平和电力系统信息化的推广,而设备编码和物资编码的关联又是具体实施和推广信息化的关键之一。因此为了适应我国电力行业发展的趋势,应当尽快制定出一套适合我国电力发展的电厂资产标识系统,使电力行业的各个部门能够建立统一的物资设备代码。参考文献:[1]姚树通.电力企业物资编码探讨[J].物流技术,2007(4):107-108,126.图7查询界面[2]刘一尘.浅论物资编码的编制及其应用[J].中国科技信息,2005(13):105.3)内在关联,通过这套软件开发系统可以自动地把[3]董杰予,林中达.电厂管理系统物资编码设计及数据库实现两种编码系统相关联,不需要人工手动查找关联,有效地[J].机电信息,2004(19):15-18.提高了工作效率。[4]罗振新,谭正坤.浅谈KKS电厂标识系统的应用[J].新疆电力技术,2007(01):62-65.4结束语目前我国的物资编码系统和KKS编码系统的发展已比第一作者简介:王雯雯,女,1984年生,江苏南京人,硕士研究较完善,但是如何更好的把两者联系起来,还有待进一步生。研究领域:数据库在电厂中的应用。改善,本软件从实际使用角度出发,在编码过程中把两者(编辑:吴智恒)38\n