

- 2.79 MB
- 2022-09-27 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
�48�3�Vol.48No.320122JOURNALOFMECHANICALENGINEERINGFeb.2012DOI�10.3901/JME.2012.03.050∗�DDS
�(�066004)�
!DANGO&DIENENTHAL(DDS)
"
#$%
&'!DDS
()#$%
*+()#,&-.%/0#1&-23#45
62378
93#*:;<=
Grübler-Kutzbach�
!"#$%&'()4S*+
,-
./012(344S*+
,-
56789:;<=>?@ABCD4S*+,-EFG
HIJ
9:=�?�∗�(2010ZX04013-021)
@ABCD
=
EF./0GH(09962119D)20110408
20111013I1JC
K)L()MN0N
\n�20122�
DDS
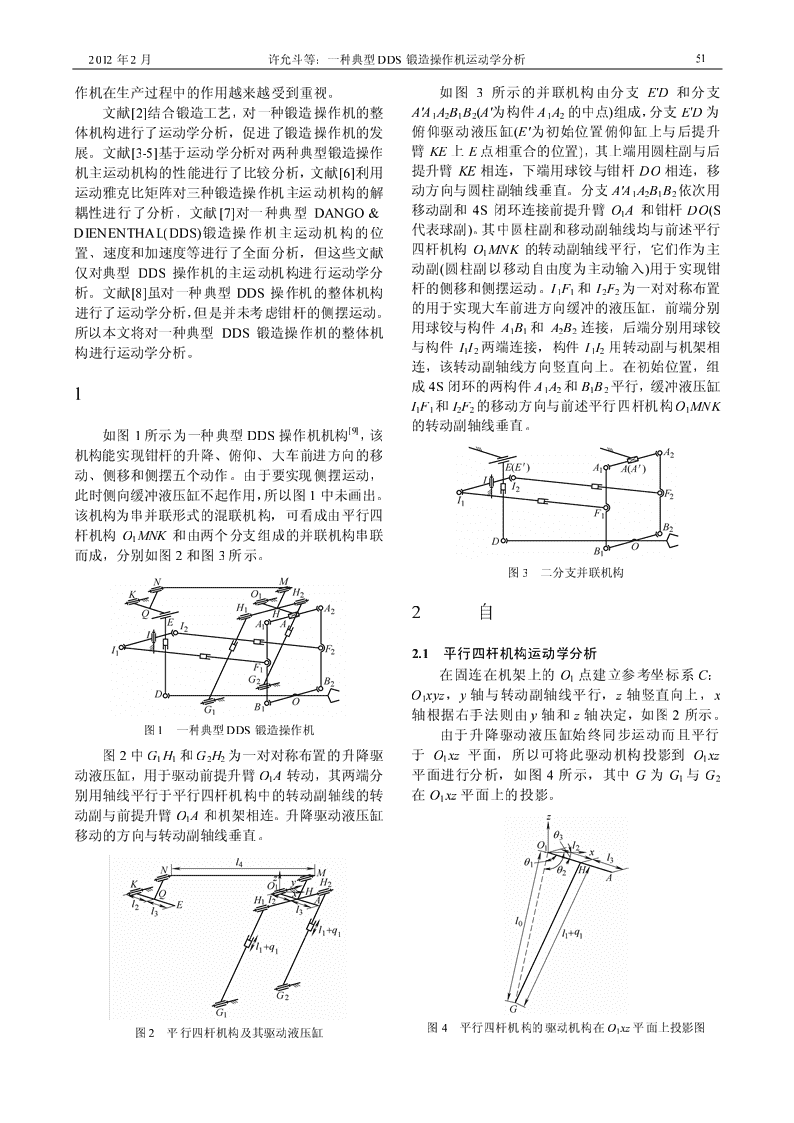
51O"#PQRN0NSTU�3=>
)IJE'D$IJVW[2]X
JYZ
[A'A1A2B1B2(A'
bA1A28c)KDIJE'D\]^_`a�bcde^`
fS"123(E'defR3g\hTgVW[3-5]ha�bcdJiZjD
UKEgEc^ijfR)WgX6kl[\hka�]lm^_`nocdVW[6]pTUKE^_mX6no\DO^_!a�qrnstJuZ
ka�]v" \kl[YZ`a(IJA'A1A2B1B2pq6wl^_`cdVW[7]JYZjDDANGO&!"[$4Srs_t
TUO1A$DO(SDIENENTHAL(DDS)
ka�]xuvn[)(W8kl[$!"[YZw\
xEFyz{-L|{-}^_`~cdVWG
O1MNKV"[YZEFyz
{JjDDDS
ka�]^_a�bc"[(kl[7!"|)}{"~)6*dVW[8]JYZjDDDS
[\]#!$#%,"(I1F1$I2F2OOPQR^_`a�bcda�6*
/0123
XIM
VJYZjDDDS
[\6no\
bA1B1$A2B2_thXIM6no]^_a�bcd\
bI1I2HX_t
bI1I26V"[\
]^_V"[YZ ag(defRK1�D4SrsH
bA1A2$B1B2EF/0123I1F1$I2F2!" \
xEFG
O1MNK[9]V"[YZ`a(�1DDS
!"#!$#%&'"
()*+#%,"-.#/012345
67189:;(
<=>?@A>
BCD)EFG
O1MNK$)H'IJKD=>
<>LDIM�2$3(N�32�2.1�
_
]gO1�CO1xyzy
z
xN
y
z
!"2#$%�1DDS
&'()*+,-./012328G1H1$G2H2OOPQRS&O1xz4#5678)9:;<=O1xz"1236*S"
TUO1AV"WHXI4>?@!"4#$ABGCG1G2M6YZEF*EFG
8V"[YZVDO1xz4E;<%"[\
TUO1A$
]^_(S"123!" \V"[YZ`a(FN�2
�4
O1xz
�\n52483DGHIO1HGBJKL6M>?�@ABCD�4S45EB1B2222lllq2011+−+()>
OF
G
&
!F
@ABCDcosθ=(1)12ll204S45890)NBθ1——O1HO1GEOHH("#EB1B2
!�4S45El2——O1HEPQB1B2%IA1A2.$678JK<&l0——O1GEPQLMNOPJK*$I1F1I2F2BC�@Ll1——'(*+,H1G1
H2G2R-PQMNOPJ�xQPJ�EB1B2%Iq1——'(*+,H1G1
H2G2STPQA1A2R
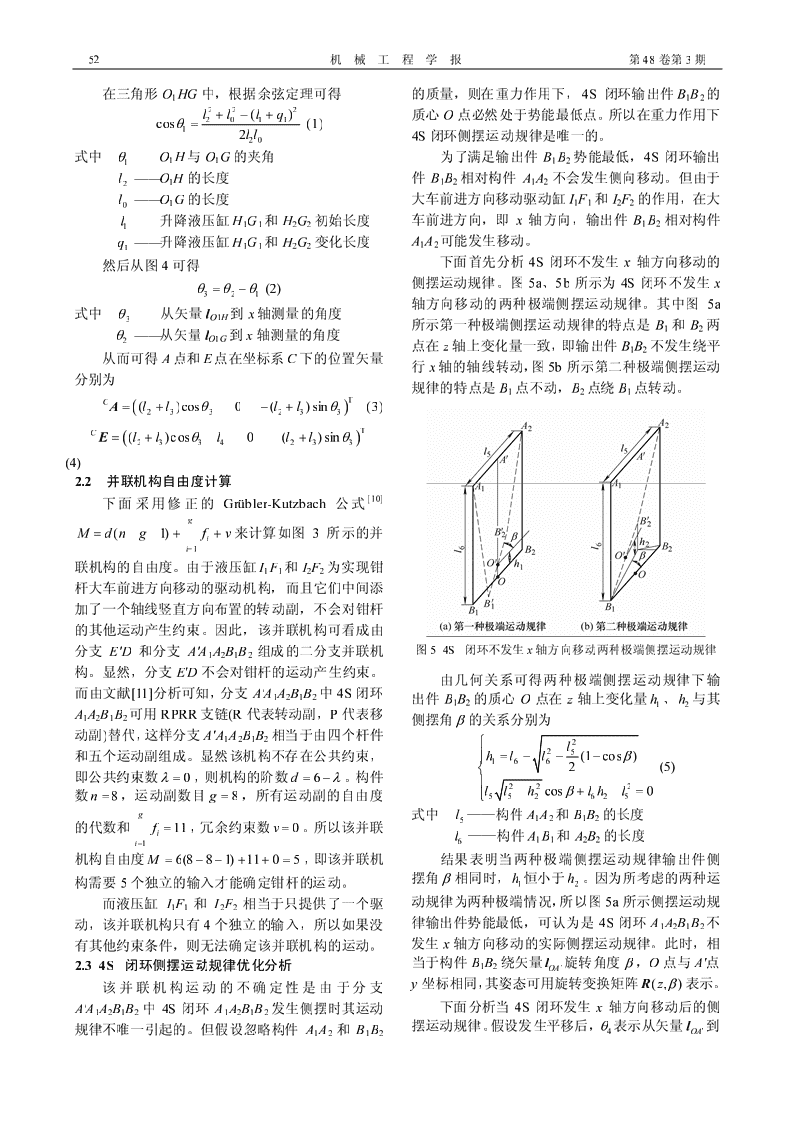
67KUVW"46M��4Sx
5a5b4Sxθθθ=−(2)321
5aNBθ3——W�XlO1H=xXEHQ
B1!B2θ2——W�XlO1G=xXEHQ "z#$%&
'()*B1B2+W26MA�
E�DCYEZ[�X,x-.'5b
?\C B1 'B2 B1 .CTA=+()()llcos0()θθ−+llsin(3)233233CTE=+()()llcosθθ−l0()−+llsin2334233(4)2.2�[10]��Grübler-KutzbachgMdng=−−++(1)fv∑i3
i=1
I1F1I2F2
!"#$%&%'()*+,-./012345"#678%9':;
<=%>?@'A
BCD��EFE'DEFA'A1A2B1B2GDEF
54Sx
H'EFE'D:;
=%>?/
012�((IJ[11]EKB'EFA'A1A2B1B2,4SLM)*B1B23O "z#$%&hh4
12A1A2B1B2BRPRRF(RNO8%9'PNO$5β06%9)N'PEFA'A1A2B1B2QR1
S⎧22l5T1=%9GDHA:U
'⎪⎪hll16=−−6−(1cos)β⎨2(5)
Vλ=0��d=−6λ⎪222⎪llh−+cosβlhl−=0n=8�
g=8�
⎩552625g7
l58*A1A2!B1B29:∑fi=11�v=0
i=1l68*A1B1!A2B29:
M=−−++=6(881)1105�;<()*5β=>?'h@hAB5
12!"#$I1F1I2F2%&'()*'C5a�
4�
+()*D'1
4SA1A2B1B2,�-
x
E
F?'=2.34S�
@8*B1B2
&lOA′ .5:β'O 4A' .
/0&12yGH=>'
!1I .$"JKR(,)zβ�A'A1A2B1B234S45A1A2B1B26789:,�4S
x
θ�l.);<=A1A2B1B24OA′\n�20122�
DDS
53zy
64SA1A2B1B2CCTOA=−′+lAO′(sinθθ044cos)(8)A1A2A'C
!CTA′=+((ll)cosθθql(−+)sinl)(9)2335233"#q!$
%
&'(
%)5*+"(8),"(9)⎧l225⎪xl=−−(1cos)sinβθ(++)cosllθO64233⎪2⎪⎨yq=O564Sx
!"#$%⎪2⎪2l5zl=−−−(1cos)cosβθ(−+)sinllθ!"#$%&'
()⎪⎩O642233*+)
,*-.B1B2(10)l/
βO0%A'0y12345OA′-./B1,B2C
lOA′'%z
6(789Rl(,)OA′β0 ![12]:;/3<78Rl(,)′β=;CMCOA⎧⎪BR=−(,,,)θβθγBO+14yzyy41>(6)�⎨CMC(11)⎪BR=−(,,,)θβθγBO+⎩24yzyy42R(,)(,)(,)(,)lRROA′β=yzy−θβθ44R(6)M"B1��B1M
��R(−θ,,)βθyzy44MB2��B2M
2.4�A1,A2C
0
OM!OuvwulDOvlB1B2⎧⎛⎞TCl5w
u!v"#$%7&'⎪A12=+⎜⎟(ll335)cosθθql−−+(2)sin33l⎪⎝2⎠
()*+M,C⎨T⎪C⎛⎞l5A=+⎜⎟(ll)cosθθq+−+(ll)sin⎪22335233⎩⎝⎠2(12)�A1A2B1B2�F1F2
C�⎧CCdCCFB=−+()AA⎪1111⎪l6⎨(13)�⎪CCFB=−+d()CAAC2222⎪l7
⎩6CTdA1F1A2F2-O*+O=()xyz
OOOI
C�[13]./*+012yzyyT(0)xzII
I1I2
CR(,,,)−θβθγ3'
./413'yzyy44�Ryzy(,,−+θ44βγθ)=⎧⎛⎞TCll55⎪I=+⎜⎟xzsinθθ−cos⎛⎞cccss+−csccssc−10II0θβχθχ44θβ444θβχθχ⎪⎝22⎠⎜⎟⎨(14)⎜⎟sccss(7)Tβχββχ⎪C⎛⎞ll55⎜⎟scccs−−ssscscc+⎪I20=−⎜⎟xzIIsinθθcos0⎝⎠θβχ44444θχθβθβχθχ⎩⎝⎠2256c∂==cos,∂∂θβχ,,4θ0
y
�lI1I2s∂==sin,∂∂θβχ,,4�llIF11==IF227l+3q(l7!"#$%&γ���'I1F1I2F2())
*+,χγθ=+4-.\n54�483⎧fqqqxyz1135(,,,,,,,,)0OOO4θβθ0=⎧⎪Fqqqxyz11(,,,,,,,,)0�����35OOO�θ4���βθ0=⎨(15)⎨(21)⎩fqqqxyz2135(,,,,,,,,)0OOO4θβθ0=⎪⎩Fqqqxyz2135(,,,,,,,,)0�����OOO�4θβθ���0=q3#$%&'I1F1I2F2/0q��=−++lccβ��lss()γθ�+y(22)D
C�!"44()4()4βγθ++44θγθ4OCMCDR=yzyy(,,,)−+θ44βθγDO=Fqqxyz312(,,,,,,,)0����OOO�4θ��βγ�=(23)⎛⎞−+l()cccssx+�F1F2F3
⎜⎟4θβγθ44()++θγθ4()4Oq�q�q�q�q�⎜⎟−+lsc()y(16)123454()βγθ+4O⎜⎟x�y�z�θ�β�γ�
⎜⎟−−lscc()csz+OOO4⎝⎠4(θβγθ44++)(θγθ44)O
x�y�z�θ�β�γ�OOO4�l��DO4q�q�q�q�q�
M12345D��DM
E'C
4ADAMS�CTE′=+((ll)cosθθ−lql(−+)sinl)23344233(17)�DDS
�q4
l0=7096mml1=8980mm!"#$E'D%&�E''Dl2=3000mml3=600mml4=8000mmC
y()ll==5000mmθ=120°d=3000mm562q=−+lsc()y(18)44βγθ()+4Ol7=9000mmxI=−5400mmzI=−3000mm*+,-lED′=l62+q(E'D./0ADAMS
!"#$%&&1A1B1'A2B2(2)3'()*
+,-./0&'+1O2fqqxyz312(,,,,,,,)0OOO4θβγ=(19)/034567,89:q1=50t�q2E'D45q2=−100t�q3=0�q4=0�q5=10t67�(10)8(15)8(18)8(19)39:;t=10s�
DDS<=>?@AB@&
CDE89��qqqqqxyz12345OOO
θβγθ�θ
4001011q1q2q3q4q5xOyOzO t=10s�!89"#
θ4βγ
xO
$%yzβγ(θ
OO4⎧x=3600.298369906609O
!")qqq⎪123y=99.999999999998323⎪Oqq
45⎪⎪z=−4018.4352936385885O⎨(24)⎪θ=1.56032407939955253�4⎪β=0.7246753677571369⎪#$�(10)(15)(18)(19)%&'()⎪⎩γ=7.202608733541031
*+&t=10s'()
*$
⎧l2
+,-*.(10)/(15)/(18)/(19)"#⎪xl�=−−25(1cos)cosβθθ−�O644⎪2⎧2⎪l2sinsinβθ2l5⎪54βθ��−+(ll)sinθ⎪xlO−−−64(1cos)sinβ(−+θθ)cosll23=3222333⎪2⎪16ll8(1cos)−−β⎪65⎪−×0.068710−9⎨yq��O=5⎪⎪−9⎪2⎨yq−=−0.001710×lO5⎪zl�=−−25(1cos)sinβθ+θ�⎪O6442⎪2⎪2l5⎪l2sincosβθ⎪zlO+−−64(1cos)cosβθ(++)sinll23=θ3⎪54βθ��−+()llcosθ22333⎪⎪16ll228(1cos)−−β−9⎩65⎪⎩−×0.001910(20)(25)\n�20122�
DDS
55⎧⎪fqqqxyz(,,,,,,,,θ)βθ0.003610=−×−9�t=10s1011
1135OOO40⎨−9⎪⎩fqqqxyz(,,,,,,,,θβθ)0.007310=×2135OOO40⎧x�=0.3582156816059718O(26)⎪y�=10.0⎪Oy−−lsc()q=×0.031710−9(27)⎪z�=111.50173749562838O8()4βγθ+4⎪O⎨(29)⎪θ�=0.36271235620813644−9fqqxyz312(,,,OOO,,,,)4θβγ0.302910=−×(28)⎪β�=0.0746067356913093⎪⎪⎩γ�=0.7324798413334182t=10s
!"(20)#(23)⎧l2⎪xl�−−−25(1cos)cosβ+(θθ)sin��ll+θθ+O6442333⎪2⎪2⎪l54sinsinβθ�×−6β=0.922310⎪16ll228(1cos)−−β65⎪⎪⎨yq��−=0�O5⎪28⎪zl�−−−2l5(1cos)sinβθ+(θ)cos��ll+θθ−⎪O64423332⎪2⎪l54sincosβθ�−9⎪β=5.653410×22⎪⎩16ll658(1cos)−−β(30)⎧⎪F(,qqqxyz�����,,,,,�,,θ���)βθ3.53710=×−91135OOO40⎨⎪⎩Fqqqxyz(,�����,,,,,�,,θβθ���)7.515110=×−92135OOO40(31)q��+(lccβ��lss−γθ�+−=)y�44βγθ()4()++44θγθ44B−69
0.102510×(32)−6Fqqxyz(,,,,,,,)1.269510�����θ��βγ�=×(33)312OOO4�
5�(1) !
Grübler-Kutzbach"#$%&'()*+,-*+�./5,0-1234.5/4,67'()10
829:;<
=
(2)7)>?@A/BCDEF4SGHIJ82KLMN$OP,QRSTUVWXYZIJ82KL,IJ[-3\E]^_yzy`abcd
ef
=$'()82
(3) yzyy`abcdgh]^,iQjklbmn/4SGHIJ[-3\E]^b,efiQ
o/pP
�(4)qrstF
DDS
u11
v)MN$82w,/xT
\n56�48382wyz{|$}~
:[7]
().!"*+",[D].-_R-
DDS
uv.-./012008.)82w
WANGHuaibin.Thekinematic&inversedynamicanalysisofforgingmanipulator[D].ShanghaiShanghai�JiaoTongUniversity2008.[8]234.56#789:;<[1].
��[J].�=[D].>?@A12009.1998(6)3-5.WANGFengxi.DevelopmentofforginghydraulicpressCHENBoweng.Mechanismanalysisonaforgingandforgingmanipulator[J].HeavyMachinery1998(6)manipulatoranditsvirtualprototyping[D].Beijing3-5.TsinghuaUniversity2009.[2]YANChangyaGAOFengZHANGYong.Kinematic[9]DANGO&DIENENTHALM.Schmiedemanipulatormodelingofaserial-parallelforgingmanipulatorwithGermanyDE20108277[P].2001-09-06.applicationtoheavy-dutymanipulations[J].Mechanics[10]BCDEFG.
HIJ#[M].>?BasedDesignofStructuresandMachines201038
HKLMNO2006.105-129.HUANGZhenZHAOYongshengZHAOTieshi.[3]RENYunpengLUChongshaoHANQingkaietal.Advancedspatialmechanism[M].BeijingHigherSimulatedcomparisononkinematicspropertiesoftwoEducationPress2006.typicalmechanismsofforgingmanipulator[C]//[11]FG.IJPQRSTUVW#*XYInternationalConferenceonMetronicsandInformationZ[&'[D].\]^_`12000.TechnologyDecember5-62007GifuJAPAN.ZHAOTieshi.SometheoreticalissuesonanalysisandBellinghamWAUSASPIE-INT2007N7942-N7942.synthesisforspatialimperfect-dofparallelrobot[D].[4]XUYundouZHAOYongsheng.ComparativeanalysisoftwoQinhuangdaoYanshanUniversity2000.typicalmechanismsofforgingmanipulator[C]//International[12]abcdefgh.VW[M].>?ConferenceonElectricalandControlEngineeringJuneiMNO1993.26-282010WuhanChina.PiscatawayNJUSAXIONGYoulunDINGHanLIUEncang.Robotics[M].IEEEComputerSociety20102314-2317.BeijingChinaMachinePress1993.[5]
.�[13]BONEVIARYUJ.Anewapproachtoorientation[J].201046(11)69-75.workspaceanalysisof6-DOFparallelmanipulators[J].ZHAOYongLINZhongqinWANGHao.ManipulationMechanismandMachineTheory2001,3615-28.performanceanalysisofheavymanipulators[J].JournalofMechanicalEngineering201046(11)69-75.��1985
[6]
.!"#$%&'[J].E-mail
xuyundou@tom.com201046(11)14-20. !1980"#
TONGXingGAOFengZHANGYong.Researchon$%&'()
E-mail
jtyao@ysu.edu.cndecouplingperformanceofmajor-motionmechanismfor*+(,-./)196201
2#
forgingmanipulators[J].JournalofMechanical
Engineering201046(11)14-20.E-mail
yszhao@ysu.edu.cn