

- 62.50 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
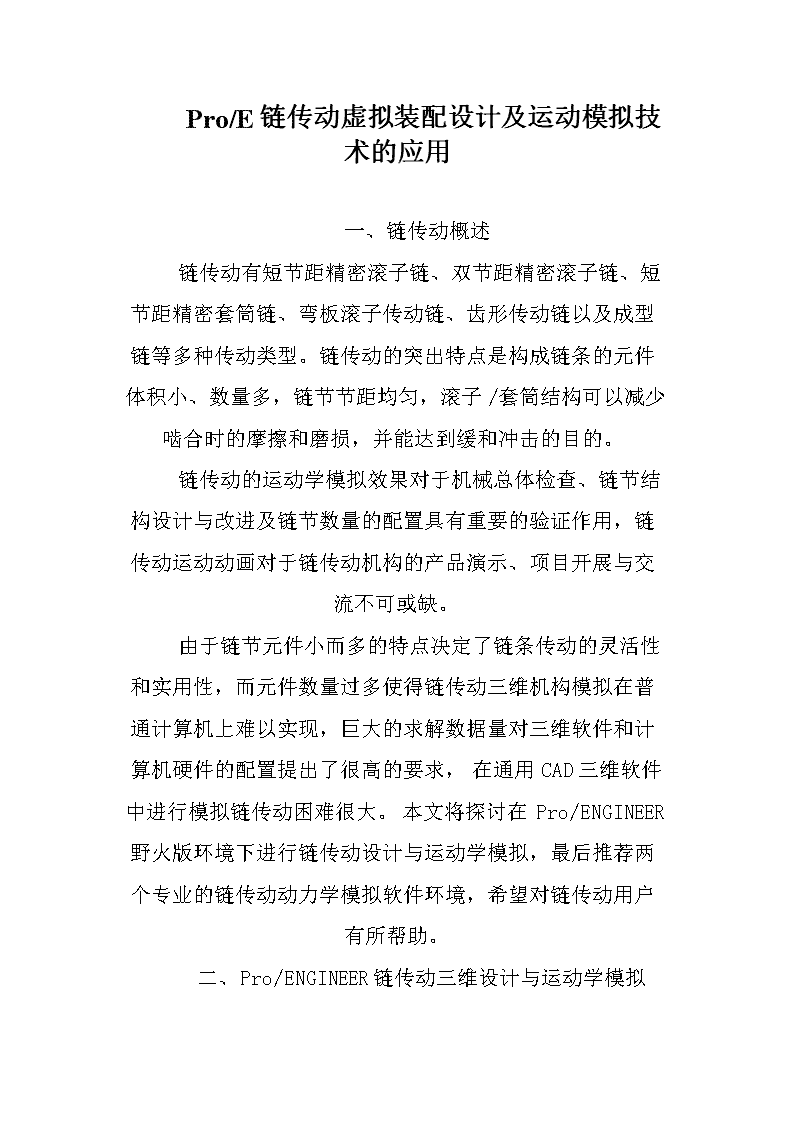
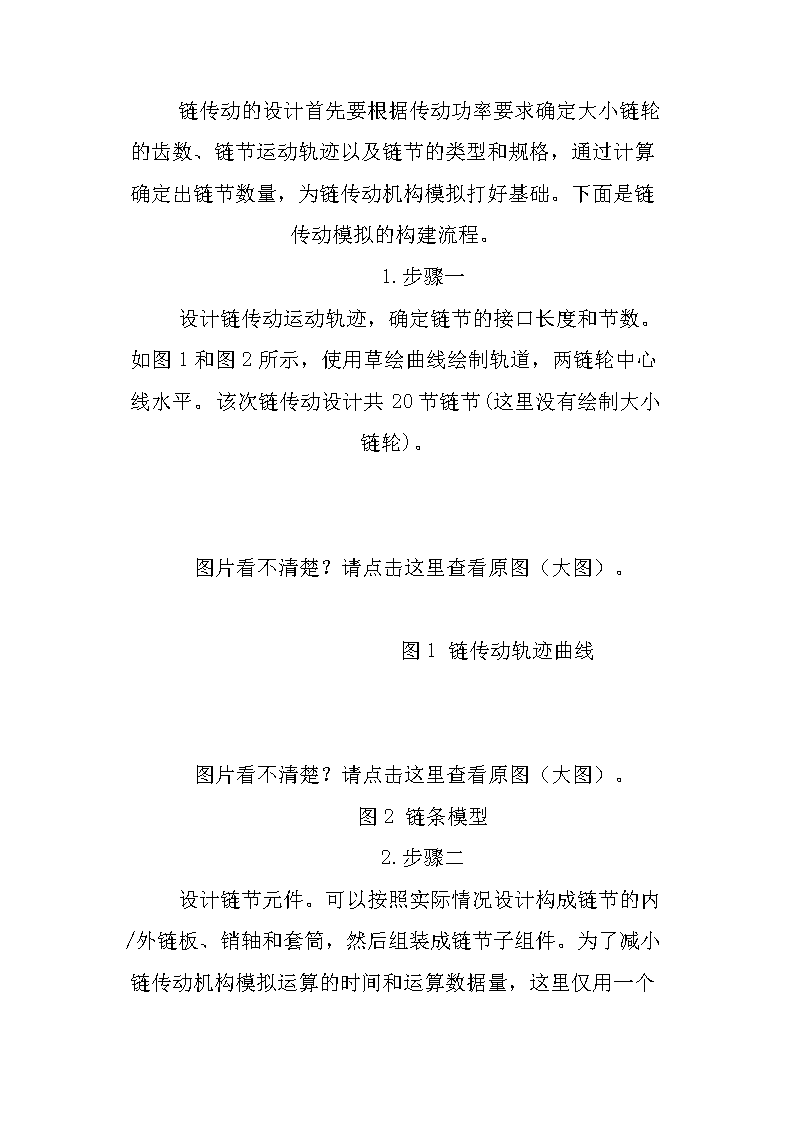
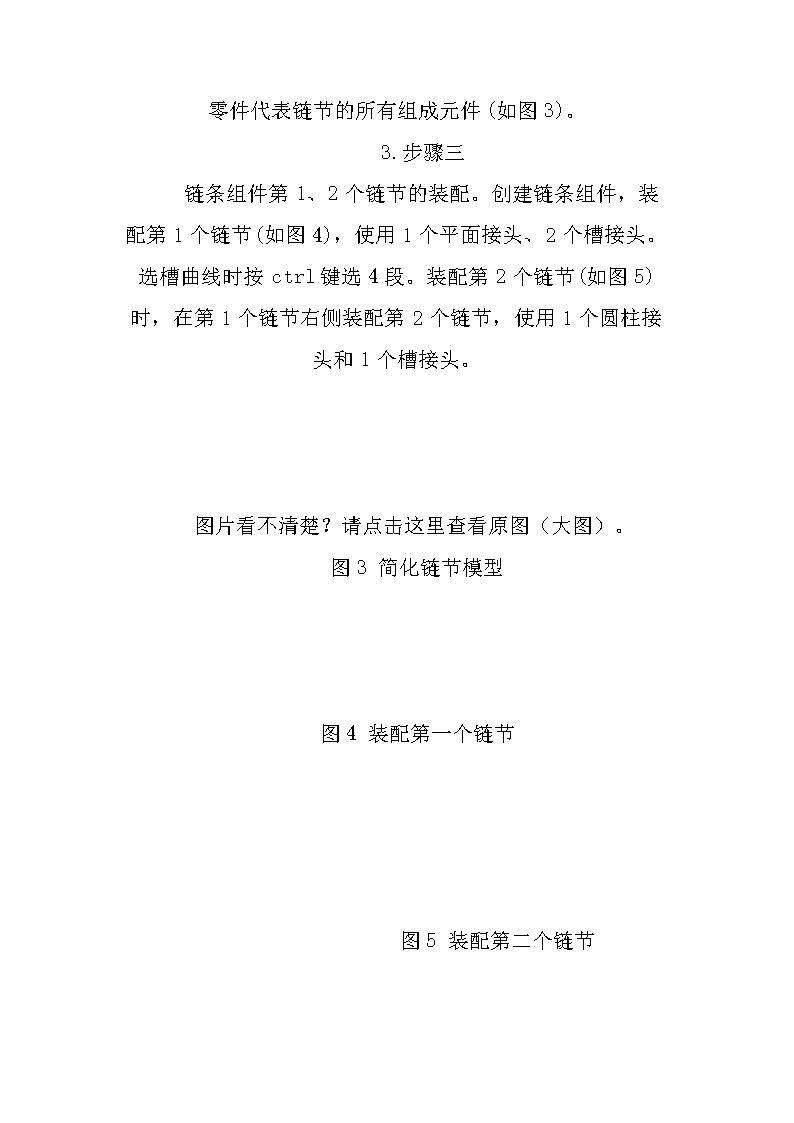
Pro/E链传动虚拟装配设计及运动模拟技术的应用 一、链传动概述 链传动有短节距精密滚子链、双节距精密滚子链、短节距精密套筒链、弯板滚子传动链、齿形传动链以及成型链等多种传动类型。链传动的突出特点是构成链条的元件体积小、数量多,链节节距均匀,滚子/套筒结构可以减少啮合时的摩擦和磨损,并能达到缓和冲击的目的。 链传动的运动学模拟效果对于机械总体检查、链节结构设计与改进及链节数量的配置具有重要的验证作用,链传动运动动画对于链传动机构的产品演示、项目开展与交流不可或缺。 由于链节元件小而多的特点决定了链条传动的灵活性和实用性,而元件数量过多使得链传动三维机构模拟在普通计算机上难以实现,巨大的求解数据量对三维软件和计算机硬件的配置提出了很高的要求,在通用CAD三维软件中进行模拟链传动困难很大。本文将探讨在Pro/ENGINEER野火版环境下进行链传动设计与运动学模拟,最后推荐两个专业的链传动动力学模拟软件环境,希望对链传动用户有所帮助。 二、Pro/ENGINEER链传动三维设计与运动学模拟\n 链传动的设计首先要根据传动功率要求确定大小链轮的齿数、链节运动轨迹以及链节的类型和规格,通过计算确定出链节数量,为链传动机构模拟打好基础。下面是链传动模拟的构建流程。 1.步骤一 设计链传动运动轨迹,确定链节的接口长度和节数。如图1和图2所示,使用草绘曲线绘制轨道,两链轮中心线水平。该次链传动设计共20节链节(这里没有绘制大小链轮)。 图片看不清楚?请点击这里查看原图(大图)。 图1链传动轨迹曲线 图片看不清楚?请点击这里查看原图(大图)。 图2链条模型 2.步骤二 \n设计链节元件。可以按照实际情况设计构成链节的内/外链板、销轴和套筒,然后组装成链节子组件。为了减小链传动机构模拟运算的时间和运算数据量,这里仅用一个零件代表链节的所有组成元件(如图3)。 3.步骤三 链条组件第1、2个链节的装配。创建链条组件,装配第1个链节(如图4),使用1个平面接头、2个槽接头。选槽曲线时按ctrl键选4段。装配第2个链节(如图5)时,在第1个链节右侧装配第2个链节,使用1个圆柱接头和1个槽接头。 图片看不清楚?请点击这里查看原图(大图)。 图3简化链节模型 图4装配第一个链节 图5装配第二个链节\n 4.步骤四 使用动力学模拟技术模拟链传动。从标准建模环境转到机构模拟环境(从应用程序→机构),从插入→初始条件,打开初始条件定义对话框。点击定义切向槽速度图标,选第一个链节上的槽连接符号(如图6),输入速度值300mm/sec。从分析→机构分析,弹出分析定义对话框,选用动态分析类型,初始配置启用初始条件,电动机和外部负荷选项卡全部清除选取。点击分析定义对话框底部的按钮,可以发现两个链节沿着轨道运动。 图6设置切向槽速度方向 图7初始条件定义 图8动态分析定义 该方法是用动力学模拟的切向槽速123下一页——\n..,。度为初始条件,并且使用动力学模拟的动态分析类型模拟运动学轨迹。这对于几个链节的运动是可以的,如果将所有链节都装配到位,则链条的机构模拟需要非常高的硬件配置,而且需要更长的运行计算时间。 5.步骤五 使用运动学模拟技术模拟整根链条的传动。由于步骤四的模拟方法需要求解力学属性,给模拟运算带来了一定的困难。下面是使用运动学分析类型进行模拟。 按步骤三装配其他链节:选中第2个链节,顺时针方向使用重复命令装配其他零件接头关系,只重复圆柱接头,如果元件重叠则移除重叠元件,退出重复对话框;选中最后1个元件重新进行重复操作,直到重复完成第20个链节(如图2)。装配完注意到最后一个链节的后安装孔无法与第1个链节的前安装孔轴对齐,可以将最后一个链节创建一个单独的零件,使孔轴尽量对齐(受装配误差和轨道位置的影响,在运动过程中该处无法实现轴完全对齐,如图9所示)。将第1、6、11、16个链节添加不同颜色,并在第6、11、16个链节上进行新设置,增加平面副(如图10)。 图9最后一个与第一个链节无法对齐 \n 图片看不清楚?请点击这里查看原图(大图)。 图10添加另外3个平面副 再分别参照4个平面副定义角速度,使第1、6、11、16个链节在圆周上运动时分别充当驱动元件,每次转过125度。另外,通过核查运算,如果角速度为125度/秒时,则第1个链节旋转一周大约需要时间4.2s。 进入机构环境,将当前装配体拍摄快照。参照第1、6、11、16个链节上的平面副接头Z轴(查询选取)定义伺服电动机(如图11和图12)。所有电机设置均为:速度方向(紫色箭头)向外,按右手定则逆时针旋转链条。设置速度初始角,选中当前,速度值为125。 图11运动角速度定义 图12速度定义设置 \n定义并运行运动分析。类型选择运动学,终止时间为4.2s(如图13)。在电动机选项卡中,设置每个电动机的生效时间段是这次链传动模拟的关键。由于前后两个电动机在临界点处不能重合(单一函数值),所以第2个电动机的起始时间比第1个电动机的结束时间推迟0.01s(如图14),对于这0.01s的时间差在最小时间间隔范围之内,是模拟计算误差所允许的。点击运行,链传动正常运行。 图13运动学定义 图14电动机作用时间段 对于链轮的旋转运动模拟,定义两个伺服电动机确定两个链轮的传速比,通过快照确定链轮和链节之间的外观啮合位置,即可完成链轮和链条的整体传动效果。 上述链传动模拟方案是在简化链节元件的前提下成功进行的,由于链传动模拟运算数据量特别大,运行模拟时可能需要几个小时甚至几天的时间,因此在运行链传动机构模拟完成时,要及时将运行结果保存(*.pbk机构回放文件),以便后续对链传动模拟结果进行更深入的研究。 三、链传动应用效果与动力学模拟专业平台实例 \n链传动在自行车、摩托车等普通交通工具上的滚子链、发动机等传动机构上的齿形链,以及在工程机械车辆上用的履带行走系统等都有广泛应用。下面是常见的发动机正时链、工程机械履带传动结构,以及链传动的动力学模拟与应用。对于这些典型的链传动,许多专业软件平台给出了专业的算法模型和模拟方法,下面是两个典型软件供应商给出的链传动解决方案。 (1)韩国FunctionBay公司基于递归算法的MFBD(多柔体动力学)分析软件--RecurDyn,其高机动性履带包对履带车辆的履带链节受力情况与车辆通过性给出了比较现实的求解方案,如图15所示。 图片看不清楚?请点击这里查看原图(大图)。 图15履带行走系统建模和通过性模拟 (2)奥地利上一页123下一页——..,。AVL李斯特公司的发动机先进模拟技术软件--Excite,对发动机正时链传动给出了专业仿真分析策略,如图16所示。 图片看不清楚?请点击这里查看原图(大图)。\n 图16发动机正时链传动建模和动力学模拟 图片看不清楚?请点击这里查看原图(大图)。上一页123——..,。