

- 821.00 KB
- 2022-09-27 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
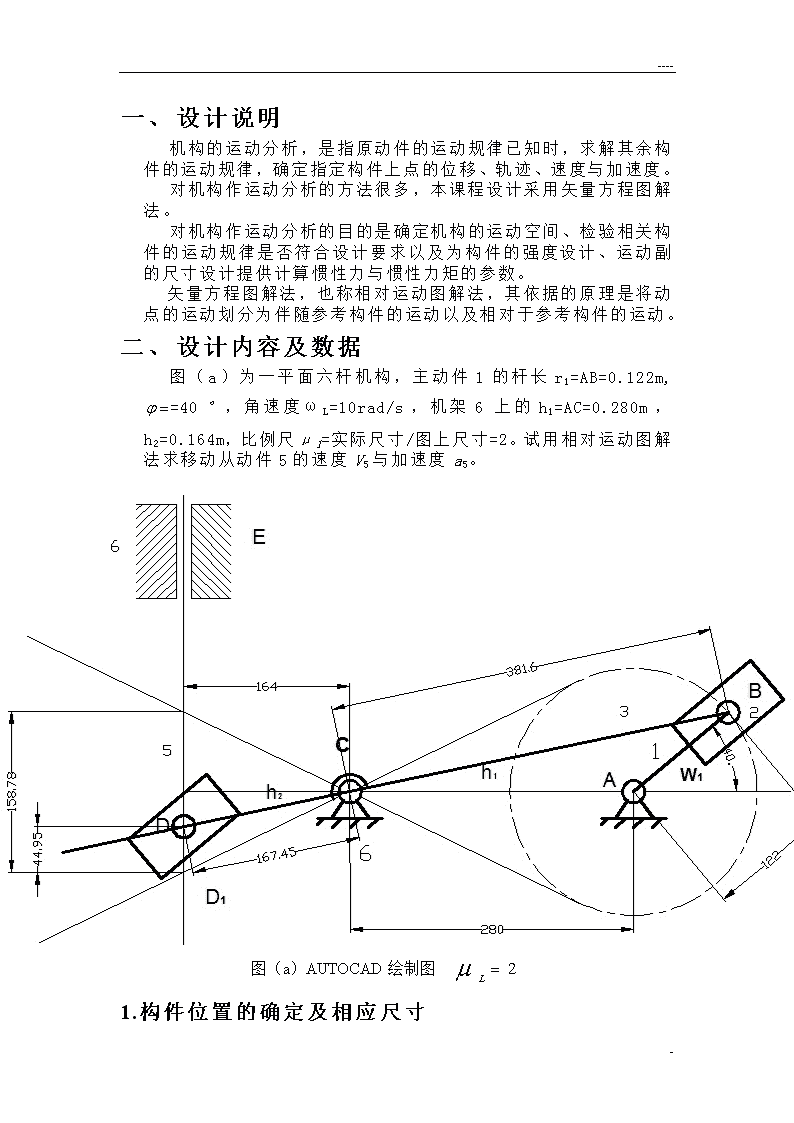
----机械原理课程设计设计题目:基于矢量图解法的平面六杆机构运动分析姓名:专业班级:学号:指导老师:-\n----目录目录1一、设计说明2二、设计内容及数据21.构件位置的确定及相应尺寸32.速度分析33.加速度分析5三、数据汇总9四、参考文献10-\n----一、设计说明机构的运动分析,是指原动件的运动规律已知时,求解其余构件的运动规律,确定指定构件上点的位移、轨迹、速度与加速度。对机构作运动分析的方法很多,本课程设计采用矢量方程图解法。对机构作运动分析的目的是确定机构的运动空间、检验相关构件的运动规律是否符合设计要求以及为构件的强度设计、运动副的尺寸设计提供计算惯性力与惯性力矩的参数。矢量方程图解法,也称相对运动图解法,其依据的原理是将动点的运动划分为伴随参考构件的运动以及相对于参考构件的运动。二、设计内容及数据图(a)为一平面六杆机构,主动件1的杆长r1=AB=0.122m,=40°,角速度ωL=10rad/s,机架6上的h1=AC=0.280m,h2=0.164m,比例尺μl=实际尺寸/图上尺寸=2。试用相对运动图解法求移动从动件5的速度V5与加速度a5。图(a)AUTOCAD绘制图1.构件位置的确定及相应尺寸-\n----由图(a)得导杆3上B、C两点之间的实际长度=381.6mm,C、D两点之间的实际长度=167.45mm;B、C两点之间的图上长度BC=190.8mm,C、D两点之间的图上长度CD=83.7mm。2.速度分析列出方程,进行分析,对两个位置点的分析。(1)根据两构件上重合点之间的速度合成原理,得导杆3上的B3点与滑块2上的B2点之间的速度方程为:=+(1)式(2)根据两构件上重合点之间的速度合成原理及已知条件,速度分析应由B点开始,滑块2上的B2点的速度为:===100.122=1.22m/s其方向垂直于AB,指向与的转向一致。(3)取速度比例尺,=实际速度(m/s)/图上尺寸(m)=10。取任意一点作为作图的起点,作,由=(2)式可得:=/=100.122/10=0.122m=122mm,作BC,作//CD,得交点,如图(b)所示。-\n----图(b)AUTOCAD绘制图从图(b)中量取=107.57mm,=57.54mm。由=(3)式可得:=/=107.5710/381.6=2.82rad/s,方向为顺时针;再由:=(4)式可得:相对速度==57.54mm10=575.4mm/s。由构件2、3之间无相对转动,所以,=。导杆3上点的速度:==2.82167.45mm=472.2mm/s(4)对D5点进行速度分析:从动件5上的点与导杆3的点之间的速度方程为:-\n----=+(5)式从动件5上的点与导杆3的点之间的速度方程为=+。(6)式由:=(7)式可得:=/=472.2/10mm=47.22mm,点的速度矢量为,过点作//CD,过点平行于从动件5的运动方向,得交点。于是,得从动件5的速度==48.0410=480mm/s==9.8910=99mm/s。3.加速度分析根据两构件重合点之间的加速度合成原理,得重合点、之间的加速度方程为:=+=+++(8)式根据两构件重合点之间的加速度合成原理,得重合点、之间的加速度,方程为=+=+++。其中、与分别为:===12.2m/-\n----==2.822×0.3816m/=3000mm/=2=2×2.82×575.4m/=3249mm/方向为沿转90°。取加速度比例尺=实际加速度(m/)/图上尺寸(m)=100,取任意一点作为作图的起点,如图(c)所示。图(C)AUTOCAD绘制图作,=/=12200/100=122mm;作,=/=3249/100=32.49mm;过作;过点作,=/=30mm;过作,与的交点为。连,表示。为此,相对加速度==77.58×100mm/=7758mm/;导杆3上点的切向加速度:==25.05×100mm/=2505mm/;导杆3上点的加速度==39.08×100mm/=3908mm/;导杆3上点的加速度==17.15×100mm/=1715mm/。-\n----图(d)AUTOCAD绘制图点的加速度分析重合点、之间的加速度方程为:=+++(9)式注:先求,再求重合点、之间的加速度方程为=+++。其中与分别为:=2=2×2.82×99mm/=558.36mm/,方向为沿转90°,如图(d)所示。-\n----由/=/=/得==3908×(167.45/381.6)mm/=1714.87mm/,为此,点的加速度==17.15mm;过点作表示,==558.36/100mm=5.6mm;过点作,过作,得交点。于是,得相对加速度==12.03×100mm/=1203mm/;从动件5的加速度===5.51×100mm/=551mm/。从动件5的在一个周期内的位移、速度与加速度如图(e)所示。-\n----三、数据汇总表1平面六杆机构的传动参数表序号曲柄角度/φ(°)位移/S5(mm)速度/V5(mm/s)加速度/a5(mm/s2)11070.65008022062.0449317533053.4448635044044.9548055155036.6248182466028.6451.5136777020.96422211688013.96411286899082684840101006.522206350111101.81307950121200.3871.493871313042608400-\n----四、参考文献[1]王洪欣冯雪君主编《机械原理》东南大学出版社2011年6月-