

- 542.00 KB
- 2021-06-16 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
(这是边文,请据需要手工删加)
名师导学·高考二轮总复习·理科数学
(这是边文,请据需要手工删加)
专题九 选考试题专题
(这是边文,请据需要手工删加)
专 题 九
选考试题专题
知识网络 【p81】
第 22 讲 坐标系与参数方程(选修 4-4)
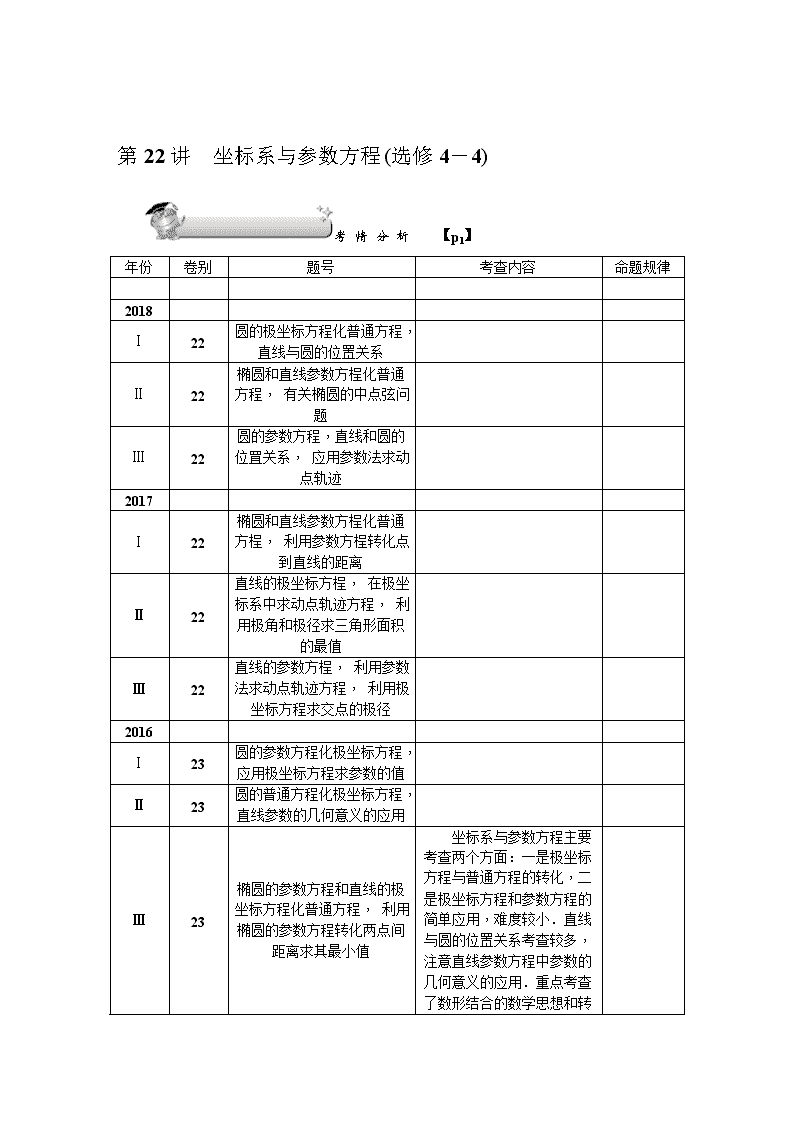
考 情 分 析 【p1】
年份 卷别 题号 考查内容 命题规律
2018
Ⅰ 22
圆的极坐标方程化普通方程,
直线与圆的位置关系
Ⅱ 22
椭圆和直线参数方桯化普通
方程, 有关椭圆的中点弦问
题
Ⅲ 22
圆的参数方程,直线和圆的
位罝关系, 应用参数法求动
点轨迹
2017
Ⅰ 22
椭圆和直线参数方桯化普通
方桯, 利用参数方桯转化点
到直线的距离
Ⅱ 22
直线的极坐标方桯, 在极坐
标系中求动点轨迹方程, 利
用极角和极径求三角形面积
的最值
Ⅲ 22
直线的参数方桯, 利用参数
法求动点轨迹方程, 利用极
坐标方程求交点的极径
2016
Ⅰ 23
圆的参数方程化极坐标方程,
应用极坐标方程求参数的值
Ⅱ 23
圆的普通方程化极坐标方程,
直线参数的几何意义的应用
Ⅲ 23
椭圆的参数方程和直线的极
坐标方程化普通方程, 利用
椭圆的参数方程转化两点间
距离求其最小值
坐标系与参数方程主要
考查两个方面:一是极坐标
方程与普通方程的转化,二
是极坐标方程和参数方程的
简单应用,难度较小.直线
与圆的位置关系考查较多,
注意直线参数方程中参数的
几何意义的应用.重点考查
了数形结合的数学思想和转
化与化归能力.解决坐标系
与参数方程中求曲线交点、
距离、线段长等几何问题时,
求解的一般方法是分别化为
普通方程和直角坐标方程后
求解,或者直接利用直线参
数的几何意义或极坐标的几
何意义求解,解题时要结合
题目自身特点,确定选择恰
当方程形式.
专 题 探 究 【p82】
【命题趋势】
1.从近几年的高考命题看,主要侧重考查参数方程与普通方程的互化,利用参数方程解
决最值问题,极坐标与直角坐标的互化及应用等.全国高考以选考试题的形式出现,只有解
答题,难度不大.主要考查学生的转化能力,数形结合能力及识图、读图能力.
2.预计在今年高考中,对本专题的考查有两个方面,一是参数方程与普通方程、极坐标
方程与直角坐标方程的互化;二是利用曲线的参数方程、极坐标方程计算某些量或讨论某些
量之间的关系.全国高考试题仍然还是以选考试题的形式出现,分值为 10 分,难度中等偏
下.
【备考建议】
1.坐标系复习时建议从以下几方面着手:一是从理解坐标系的作用入手,要求学生了解
和掌握坐标系是刻画地描述平面中点的位置;二是要求学生会进行极坐标和直角坐标的互化;
三是通过图形比较,理解极坐标系中和平面直角坐标系中的方程的区别.
2.参数方程复习时,注意强调参数方程中参数的意义,另外要能选择适当的参数写出直
线、圆和圆锥曲线的参数方程.
典 例 剖 析 【p82】
探究一 参数方程,极坐标与直角坐标互化
例 1 已知曲线 C1 的参数方程为{x=4+5cos t,
y=5+5sin t (t 为参数),以坐标原点为极点,x 轴
的正半轴为极轴建立极坐标系,曲线 C2 的极坐标方程为 ρ=2sin θ.
(1)把 C1 的参数方程化为极坐标方程;
(2)求 C1 与 C2 交点的极坐标(ρ≥0,0≤θ<2π).
【解析】将{x=4+5cos t,
y=5+5sin t 消去参数 t,化为普通方程得(x-4)2+(y-5)2=25,
即 C1:x2+y2-8x-10y+16=0.
将{x=ρcos θ,
y=ρsin θ 代入 x2+y2-8x-10y+16=0 得 ρ2-8ρcos θ-10ρsin θ+16=0.
(Ⅱ)C2 的普通方程为 x2+y2-2y=0.
由{x2+y2-8x-10y+16=0,
x2+y2-2y=0, 解得{x=1,
y=1 或{x=0,
y=2.
所以 C1 与 C2 交点的极坐标分别为( 2,
π
4 ),(2,
π
2 ).
例 2 在极坐标系中, 曲线 C 的方程为 ρ=2 2sin(θ+π
4 ). 以极点 O 为原点, 极轴所在
直线为 x 轴建立平面直角坐标系 xOy.
(1)求曲线 C 的普通方程;
(2)在直角坐标系中,点 P(x,y)是曲线 C 上的动点,试求当 2x+y 取最大值时点 P 的直
角坐标.
【解析】(1)由 ρ=2 2sin(θ+π
4 ),得 ρ=2sin θ+2cos θ,
从而 ρ2-2ρsin θ-2ρcos θ=0 , 由 ρ2=x2+y2,ρcos θ=x,ρsin θ=y,
得 x2+y2-2x-2y=0,即(x-1 )
2
+(y-1 )
2
=2 为圆 C 的普通方程.
(2)由(1)可得,曲线 C 的参数方程为{x=1+ 2cos α,
y=1+ 2sin α (α 为参数) .
2x+y=3+ 2(sin α+2cos α)=3+ 10sin(α+φ ),
其中 sin φ=2 5
5 ,cos φ= 5
5 ,φ∈(0,
π
2 ),
当 α=2kπ+
π
2 -φ,k∈Z 时,2x+y 取最大值 10+3.
故 2x+y 取到最大值时点 P 的直角坐标为(1+2 10
5 ,1+ 10
5 ).
【点评】解决坐标系与参数方程相关问题,一般先根据题目已知条件将曲线的方程转化
成同一坐标系下的方程,然后利用平面解析几何的方法进行计算求解即可.化参数方程为普
通方程的关键是消参,可以利用加减消元、平方消元、代入法等等;在极坐标方程与参数方
程的条件下求解直线与圆的位置关系问题时,通常将极坐标方程化为直角坐标方程,参数方
程化为普通方程来解决.
探究二 参数方程与极坐标方程的应用
例 3 在直角坐标系 xOy 中,曲线 C 的参数方程为{x=3cos θ,
y=sin θ (θ 为参数),直线 l 的
参数方程为{x=a+4t,
y=1-t (t 为参数).
(1)若 a=-1,求 C 与 l 的交点坐标;
(2)若 C 上的点到 l 的距离的最大值为 17,求 a.
【解析】(1)a=-1 时,直线 l 的方程为 x+4y-3=0.曲线 C 的标准方程是x2
9 +y2=1,
联立方程组{x+4y-3=0,
x2
9 +y2=1, 解得:{x=3,
y=0 或{x=-21
25,
y=24
25.
则 C 与 l 的交点坐标是(3,0 )和(-21
25 ,
24
25).
(2)直线 l 的一般式方程是 x+4y-4-a=0.设曲线 C 上点 P(3cos θ ,sin θ).
则点 P 到直线 l 距离 d=|3cos θ+4sin θ-4-a|
17
=|5sin(θ+φ )-4-a|
17 ,其中 tan φ
=3
4.
依题意得:dmax= 17,解得 a=-16 或 a=8.
【点评】涉及圆、椭圆、抛物线上的动点的最值问题, 可以考虑应用其参数方桯设动点
的坐标, 以参数为目标函数的变量而求得最值.
例 4 在直角坐标系 xOy 中,圆 C1:(x-2 )
2
+(y-4 )
2
=20,以坐标原点 O 为极点,x 轴
的正半轴为极轴建立极坐标系,直线 C2:θ=
π
3 (ρ ∈ R).
(1)求 C1 的极坐标方程和 C2 的平面直角坐标系方程;
(2)若直线 C3 的极坐标方程为 θ=
π
6 (ρ ∈ R),设 C1 与 C2 的交点为 O,M,C1 与 C3 的交
点为 O,N,求△OMN 的面积.
【解析】(1)因为圆 C1 的普通方程为 x2+y2-4x-8y=0,
把 x=ρcos θ,y=ρsin θ代入方程得ρ2-4ρcos θ-8ρsin θ=0,
所以 C1 的极坐标方程为 ρ=4cos θ+8sin θ,
C2 的平面直角坐标系方程为 y= 3x.
(2)分别将 θ=
π
3 ,θ=
π
6 代入 ρ=4cos θ+8sin θ,
得 ρ1=2+4 3,ρ2=4+2 3,
则△OMN 的面积为 S=1
2×(2+4 3)×(4+2 3)×sin(π
3 -π
6 )=8+5 3.
【点评】解决这类问题一般有两种思路.一是将极坐标方程化为直角坐标方程,求出交
点的直角坐标,再将其化为极坐标;二是将曲线的极坐标方程联立,根据限制条件求出极坐
标.要注意题目所给的限制条件及隐含条件.
探究三 直线参数方程的应用
例 5 在直角坐标系 xOy 中,已知点 P(0, 3),曲线 C 的参数方程为{x= 2cos φ,
y=2sin φ
(φ为参数).以原点为极点,x 轴正半轴为极轴建立极坐标系,直线 l 的极坐标方程为ρ=
3
2cos(θ-π
6 )
.
(1)判断点 P 与直线 l 的位置关系并说明理由;
(2)设直线 l 与曲线 C 的两个交点分别为 A,B,求 1
|PA |
+ 1
|PB |
的值.
【解析】(1)点 P 在直线 l 上,理由如下:
直线 l:ρ= 3
2cos(θ-π
6 )
,即 2ρcos(θ-π
6 )= 3,亦即 3ρcos θ+ρsin θ= 3,∴直线
l 的直角坐标方程为 3x+y= 3,易知点 P 在直线 l 上.
(2)由题意,可得直线 l 的参数方程为{x=-1
2t,
y= 3+ 3
2 t
(t为参数),曲线 C 的普通方程为x2
2 +y2
4
=1.将直线 l 的参数方程代入曲线 C 的普通方程,得 2(-1
2t )2
+( 3+ 3
2 t)2
=4,∴5t2+12t-
4=0,设两根为 t1,t2,∴t1+t2=-12
5 ,t1·t2=-4
5<0,故 t1 与 t2 异号,∴|PA |+|PB |=
|t1-t2 |= (t1+t2 )2
-4t1·t2=4 14
5 ,
∴|PA |·|PB |=|t1|· |t2|=-t1·t2=4
5,
∴ 1
|PA |
+ 1
|PB |
=|PA |+|PB |
|PA |·|PB |
= 14.
探究四 极坐标、参数方程综合应用
例 6 已知抛物线 C 的方程为 y2=8x,以抛物线 C 的焦点 F 为极点,以 x 轴在点 F 右侧
部分为极轴建立极坐标系.
(1)求抛物线 C 的极坐标方程;
(2)P,Q 是曲线 C 上的两个点,若 FP⊥FQ,求 1
|FP|+ 1
|FQ|的最大值.
【解析】(1)由抛物线的定义得: ρ
4+ρcos θ=1(ρ>0),
即:ρ= 4
1-cos α(ρ>0).
(2)由(1)得: 1
|FP|+ 1
|FQ|= 1
ρ1+ 1
ρ2=
1-cos θ+1-cos(θ+π
2 )
4 =2+sin θ-cos θ
4
=
2+ 2sin(θ-π
4 )
4 ≤2+ 2
4 ,当且仅当 θ=3π
4 时等号成立,故 1
|FP|+ 1
|FQ|的最大值为2+ 2
4 .
规 律 总 结 【p85】
1.在由点的直角坐标化为极坐标时,一定要注意点所在象限和极角的范围,否则点的极
坐标将不唯一.
2.将曲线的方程进行互化时,一定要注意变量的范围,要注意转化的等价性.
3.参数方程化为普通方程的基本思想是消去参数,常用的消参数方法有代入消去法、加
减消去法、恒等式法(三角的或代数的)消去法,不能忘了参数的范围.
4.过点 P0(x0,y0),倾斜角为 α 的直线参数方程的标准形式为{x=x0+tcos α,
y=y0+tsin α (t 为参
数),t 的几何意义是直线上的点 P 到点 P0(x0,y0)的数量,即 t=|PP0|时为距离.使用该式时
直线上任意两点 P1、P2 对应的参数分别为 t1、t2,则|P1P2|=|t1-t2|,P1P2 中点对应的参数为1
2
(t1+t2).
高 考 回 眸 【p85】
考题 1[2018·全国卷Ⅱ]在直角坐标系 xOy 中,曲线 C 的参数方程为{x=2cos θ,
y=4sin θ (θ 为
参数),直线 l 的参数方程为{x=1+tcos α,
y=2+tsin α (t 为参数).
(1)求 C 和 l 的直角坐标方程;
(2)若曲线 C 截直线 l 所得线段的中点坐标为(1,2),求 l 的斜率.
【解析】(1)因为曲线 C 的参数方程为{x=2cos θ,
y=4sin θ (θ 为参数),
所以曲线 C 的直角坐标方程为x2
4 +y2
16=1.
因为直线 l 的参数方程为{x=1+tcos α,
y=2+tsin a (t 为参数).
所以①当 α≠
π
2 +kπ,k∈Z 时,直线 l 的直角坐标方程为 y=xtan α+2-tan α;
②当 α=
π
2 +kπ,k∈Z 时,直线 l 的直角坐标方程为 x=1.
(2)解法一:点差法:设直线与椭圆的交点为 A、B,坐标分别为(x1,y1)、(x2,y2),中点
为 P.
则有{x
4+ y
16=1,
x
4+ y
16=1,
作差可知:kAB·kOP= 1
e2-1,kAB·2= 1
12
16-1
=-4,所以 kAB=-2.
解法二:参数法:将直线 l 的参数方程代入 C 的直角坐标方程,整理得关于 t 的方程(1+
3cos2α)t2+4(2cos α+sin α)t-8=0,
t1+t2=-4(2cos α+sin α)
1+3cos2α .
由题意可知:t1+t2=0,∴2cos α+sin α=0⇒tan α=-2.
解法三:{x2
4+y2
16=1,
y=xtan α+2-tan α,
⇒(4+tan2α)x2+2tan α(2-tan α)x+(2-tan α)2-16=0,
所以 x1+x2=-2tan α(2-tan α)
(4+tan2α) =2,
解得:tan α=-2.
【命题立意】本题主要考查参数方程、极坐标方程与普通方程的互化, 考查直线与椭圆
的中点弦问题及其解法.
考题 2[2018·全国卷Ⅲ]在平面直角坐标系 xOy 中,⊙O 的参数方程为 {x=cos θ,
y=sin θ (θ
为参数),过点(0 , - 2)且倾斜角为 α 的直线 l 与⊙O 交于 A,B 两点.
(1)求 α 的取值范围;
(2)求 AB 中点 P 的轨迹的参数方程.
【解析】(1)⊙O 的参数方程为{x=cos θ,
y=sin θ,
∴⊙O 的普通方程为 x2+y2=1.
当 α=90°时,直线 l:x=0 与⊙O 有两个交点;
当 α≠90°时,设直线 l 的方程为 y=xtan α- 2,由直线 l 与⊙O 有两个交点有
|0-0- 2|
1+tan2α<1,得 tan2α>1,
∴tan α>1 或 tan α<-1,∴45°<α<90°或 90°<α<135°,综上 α∈(45°,135
°).
(2)点 P 坐标为(x,y),当 α=90°时,点 P 坐标为(0,0);当 α≠90°时,设直线 l 的方
程为 y=kx- 2,A(x1,y1),B(x2,y2),∴{x2+y2=1 ①,
y=kx- 2 ②,有 x2+(kx- 2)2=1,整理得(1+
k2)x2-2 2kx+1=0,
∴x1+x2=2 2k
1+k2,y1+y2=
-2 2
1+k2 ,
∴{x= 2k
1+k2 ③,
y=- 2
1+k2 ④,
得 k=-x
y,
代入④得 x2+y2+ 2y=0.
当点 P(0,0)时满足方程 x2+y2+ 2y=0,
∴AB 的中点 P 的轨迹方程是 x2+y2+ 2y=0,即 x 2+(y+ 2
2 )2
=1
2,由图可知,A 1
( 2
2 ,- 2
2 ),A2(- 2
2 ,- 2
2 ),则- 2
2 0),过点 P(-2,-4)的直线 l:{x=-2+ 2
2 t,
y=-4+ 2
2 t
(t 为参数)与曲线 C
相交于 M,N 两点.
(1)求曲线 C 的直角坐标方程和直线 l 的普通方程;
(2)若|PM|,|MN|,|PN|成等比数列,求实数 a 的值.
【解析】(1)把{x=ρcos θ,
y=ρsin θ 代入 ρsin2θ=2acos θ,得 y2=2ax(a>0),
由{x=-2+ 2
2 t,
y=-4+ 2
2 t
(t 为参数),消去 t 得 x-y-2=0,
∴曲线 C 的直角坐标方程和直线 l 的普通方程分别是
y2=2ax(a>0),x-y-2=0.
(2)将{x=-2+ 2
2 t,
y=-4+ 2
2 t
(t 为参数)代入 y2=2ax,
整理得 t2-2 2(4+a)t+8(4+a)=0.
设 t1,t2 是该方程的两根,
则 t1+t2=2 2(4+a),t1·t2=8(4+a),
∵|MN|2=|PM|·|PN|,
∴(t1-t2)2=(t1+t2)2-4t1·t2=t1·t2,
∴8(4+a)2-4×8(4+a)=8(4+a),
∴a=1.
B 组 能力提升
8.以直角坐标系的原点 O 为极点,x 轴的正半轴为极轴,且两个坐标系取相等的长度单
位.已知直线 l 的参数方程为{x=tcos φ,
y=1+tsin φ(t 为参数,0≤φ<π),曲线 C 的极坐标方程为
ρcos2θ=4sin θ.
(1)求直线 l 的普通方程和曲线 C 的直角坐标方程;
(2)设直线 l 与曲线 C 相交于 A,B 两点,当 φ 变化时,求|AB |的最小值.
【解析】(1) 由{x=tcos φ,
y=1+tsin φ,消去 t 得 xsin φ-ycos φ+cos φ=0,
所以直线 l 的普通方程为 xsin φ-ycos φ+cos φ=0.
由 ρcos2θ=4sin θ,得(ρcos θ)2
=4ρsin θ,
把 x=ρcos θ,y=ρsin θ代入上式,得 x2=4y,
所以曲线 C 的直角坐标方程为 x2=4y.
(2) 将直线 l 的参数方程代入 x2=4y,得 t2cos2φ-4tsin φ-4=0,
设 A、B 两点对应的参数分别为 t1,t2,则 t1+t2=4sin φ
cos2φ ,t1t2=
-4
cos2φ,
所以|AB |=|t1-t2 |= (t1+t2)2-4t1t2= 16sin2φ
cos4φ + 16
cos2φ= 4
cos2φ.
当 φ=0 时,|AB |的最小值为 4.
9.已知曲线 C1:x+ 3y= 3和 C2:{x= 6cos φ,
y= 2sin φ (φ 为参数).以原点 O 为极点,x
轴的正半轴为极轴,建立极坐标系,且两种坐标系中取相同的长度单位.
(1)把曲线 C1 和 C2 的方程化为极坐标方程;
(2)设 C1 与 x,y 轴交于 M,N 两点,且线段 MN 的中点为 P,若射线 OP 与 C1,C2 交于
P,Q 两点,求 P,Q 两点间的距离.
【解析】(1)曲线 C1 化为 ρcos θ+ 3ρsin θ= 3,
∴ρsin(θ+π
6 )= 3
2 .
曲线 C2 化为x2
6+y2
2=1.(*)
将 x=ρcos θ,y=ρsin θ代入(*)式,
得 ρ2
6 cos2θ+ρ2
2 sin2θ=1,即 ρ2(cos2θ+3sin2θ)=6,
∴曲线 C2 的极坐标方程为 ρ2= 6
1+2sin2θ.
(2)∵M( 3,0),N(0,1),所以 P( 3
2 ,
1
2),
∴OP 的极坐标方程为 θ=
π
6 ,
把 θ=
π
6 代入 ρsin(θ+π
6 )= 3
2 得 ρ1=1,P(1,
π
6 ).
把 θ=
π
6 代入 ρ2= 6
1+2sin2θ得 ρ2=2,Q(2,
π
6 ).
∴|PQ|=|ρ2-ρ1|=1,即 P,Q 两点间的距离为 1.
10.在平面直角坐标系 xOy 中,曲线 C 的参数方程为{x=4cos θ,
y=2sin θ (θ 为参数).
(1)求曲线 C 的普通方程;
(2)经过点 M(2,1)(平面直角坐标系 xOy 中的点)作直线 l 交曲线 C 于 A,B 两点,若 M
恰好为线段 AB 的中点,求直线 l 的斜率.
【解析】(1)由曲线 C 的参数方程,得{cos θ=x
4,
sin θ=y
2,
所以曲线 C 的普通方程为x2
16+y2
4=
1.
(2)设直线 l 的倾斜角为 θ1,则直线 l 的参数方程为{x=2+tcos θ1,
y=1+tsin θ1 (t 为参数).
代入曲线 C 的直角坐标方程,得(cos2θ1+4sin2θ1)t2+(4cos θ1+8sin θ1)t-8=0,
所以 t1+t2=-4cos θ1+8sin θ1
cos2θ1+4sin2θ1 ,由题意可知 t1=-t2.
所以 4cos θ1+8sin θ1=0,得 k=-1
2.所以直线 l 的斜率为-1
2.
11.在极坐标系中,曲线 C1:ρ=2cos θ,曲线 C2:ρsin2θ=4cos θ.以极点为坐标原
点,极轴为 x 轴正半轴建立直角坐标系 xOy,曲线 C 的参数方程为{x=2+1
2t,
y= 3
2 t
(t 为参数).
(1)求 C1,C2 的直角坐标方程;
(2)C 与 C1,C2 交于不同四点,这四点在 C 上的排列顺次为 P,Q,R,S,求||PQ |-|RS ||
的值.
【解析】(1)因为 x=ρcos θ,y=ρsin θ,由 ρ=2cos θ得 ρ2=2ρcos θ,
所以曲线 C1 的直角坐标方程为(x-1 )
2
+y2=1,
由 ρsin2θ=4cos θ得 ρ2sin2θ=4ρcos θ,所以曲线 C2 的直角坐标方程为:y2=4x.
(2)不妨设四个交点自下而上依次为 P,Q,R,S,它们对应的参数分别为 t1,t2,t3,t4.
把{x=2+1
2t,
y= 3
2 t
代入 y2=4x,得3t2
4 =4(2+t
2 ),即 3t2-8t-32=0,
则 Δ1=(-8 )
2
-4×3×(-32 )=448>0,t1+t4=8
3,
把{x=2+1
2t,
y= 3
2 t
代入(x-1 )
2
+y2=1,得(2+1
2t-1)2
+( 3
2 t )2
=1,即 t2+t=0,
则 Δ2=1>0,t2+t3=-1,
所以||PQ|-|RS||=|(t2-t1)-(t4-t3)|=|t2+t3-(t1+t4)|=|1+8
3 |=11
3 .