

- 355.50 KB
- 2021-06-21 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
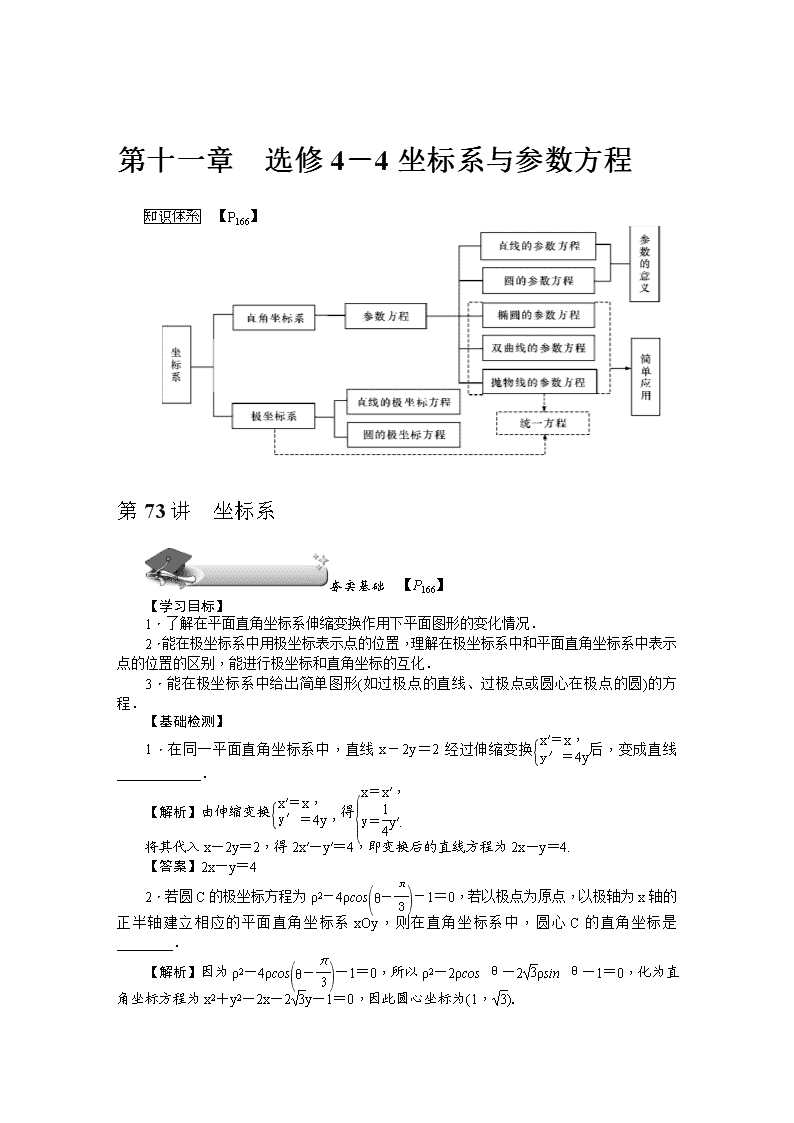
第十一章 选修4-4坐标系与参数方程
【P166】
第73讲 坐标系
夯实基础 【P166】
【学习目标】
1.了解在平面直角坐标系伸缩变换作用下平面图形的变化情况.
2.能在极坐标系中用极坐标表示点的位置,理解在极坐标系中和平面直角坐标系中表示点的位置的区别,能进行极坐标和直角坐标的互化.
3.能在极坐标系中给出简单图形(如过极点的直线、过极点或圆心在极点的圆)的方程.
【基础检测】
1.在同一平面直角坐标系中,直线x-2y=2经过伸缩变换后,变成直线____________.
【解析】由伸缩变换得
将其代入x-2y=2,得2x′-y′=4,即变换后的直线方程为2x-y=4.
【答案】2x-y=4
2.若圆C的极坐标方程为ρ2-4ρcos-1=0,若以极点为原点,以极轴为x轴的正半轴建立相应的平面直角坐标系xOy,则在直角坐标系中,圆心C的直角坐标是________.
【解析】因为ρ2-4ρcos-1=0,所以ρ2-2ρcos θ-2ρsin θ-1=0,化为直角坐标方程为x2+y2-2x-2y-1=0,因此圆心坐标为(1,).
【答案】(1,)
3.在极坐标系中,圆心在(,π)且过极点的圆的方程是________.
【解析】O为极点,OB为直径,A(ρ,θ),则∠ABO=θ-90°,OB=2=,化简得ρ=-2cos θ.
4.在极坐标系中,已知两点A、B的极坐标分别为、,求△AOB(其中O为极点)的面积.
【解析】由题意知A、B的极坐标分别为、,则△AOB的面积S△AOB=OA·OB·sin∠AOB=×3×4×sin=3.
5.求在极坐标系中,过点且与极轴平行的直线方程.
【解析】点在直角坐标系下的坐标为
,即(0,2).
∴过点(0,2)且与x轴平行的直线方程为y=2.
其极坐标方程为ρsin θ=2.
【知识要点】
1.平面直角坐标系中的伸缩变换
设点P(x,y)是平面直角坐标系中的任意一点,在变换φ:____的作用下,点P(x,y)对应到点P′(x′,y′),称φ为平面直角坐标系中的__坐标伸缩变换__,简称伸缩变换.
2.极坐标系与点的极坐标
在平面上取一个定点O,自点O引一条射线Ox,同时确定一个长度单位和计算角度的正方向(通常取逆时针方向为正方向),这样就建立了一个极坐标系.其中,点O称为极点,射线Ox称为极轴.
设M是平面上任意一点,ρ表示OM的长度,θ表示以射线Ox为始边、射线OM为终边所成的角.那么,有序数对__(ρ,θ)__称为点M的极坐标.显然,每一个有序实数对(ρ,θ)决定一个点的位置.其中,ρ称为点M的__极径__,θ称为点M的__极角__.
由极径的意义可知ρ≥0,当极角θ的取值范围是[0,2π)时,平面上的点(除去极点)就与极坐标(ρ,θ)(ρ≠0)建立一一对应的关系,我们约定,极点的极坐标是极径ρ=0,极角θ可取任意角.
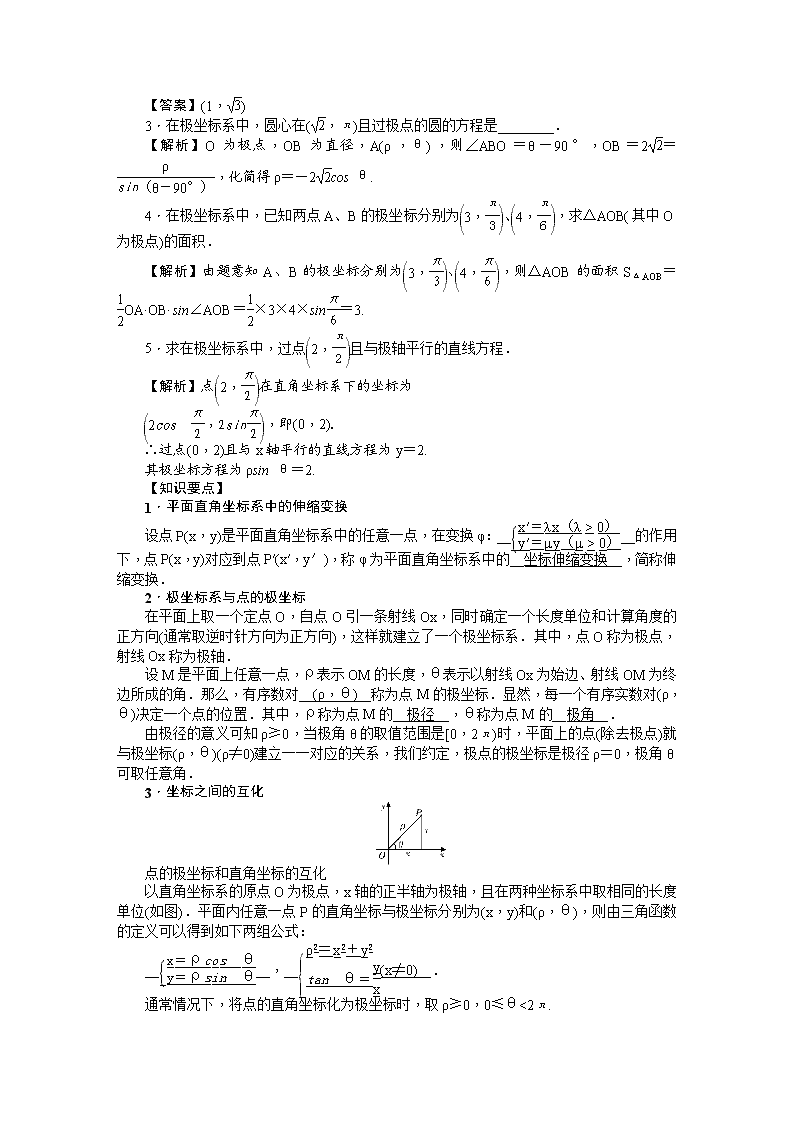
3.坐标之间的互化
点的极坐标和直角坐标的互化
以直角坐标系的原点O为极点,x轴的正半轴为极轴,且在两种坐标系中取相同的长度单位(如图).平面内任意一点P的直角坐标与极坐标分别为(x,y)和(ρ,θ),则由三角函数的定义可以得到如下两组公式:
____,__(x≠0)__.
通常情况下,将点的直角坐标化为极坐标时,取ρ≥0,0≤θ<2π.
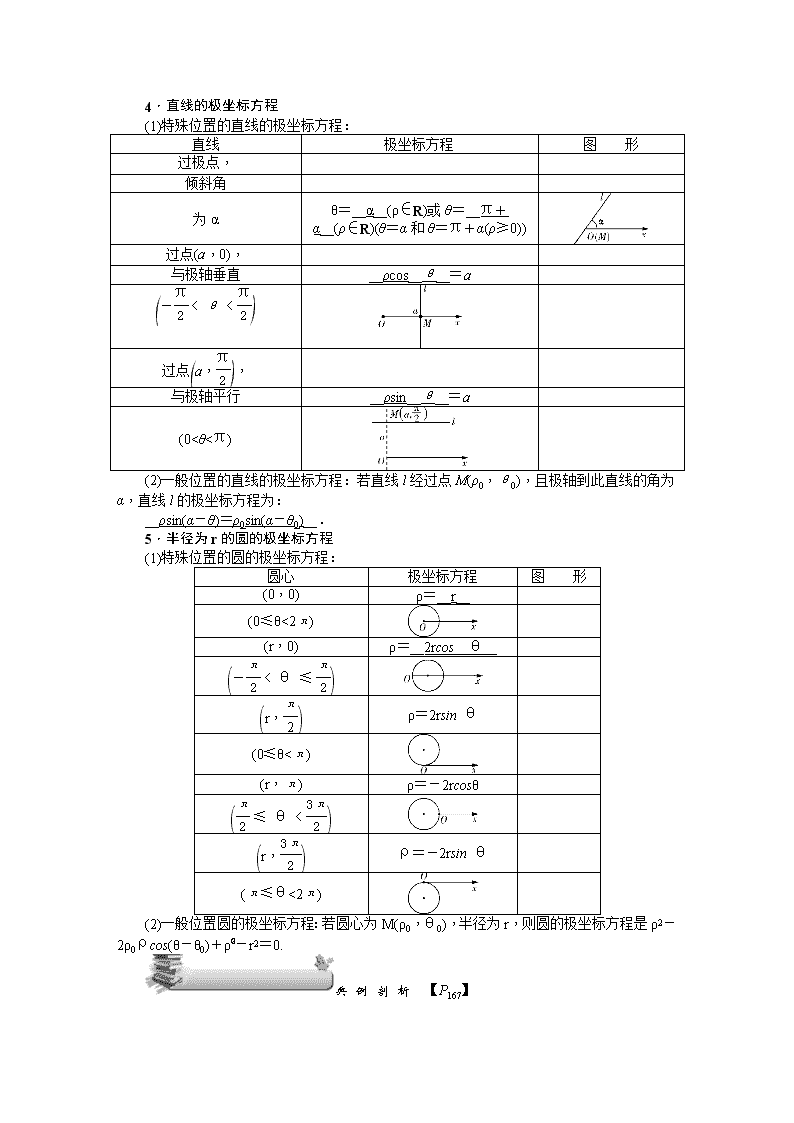
4.直线的极坐标方程
(1)特殊位置的直线的极坐标方程:
直线
极坐标方程
图 形
过极点,
倾斜角
为α
θ=__α__(ρ∈R)或θ=__π+α__(ρ∈R)(θ=α和θ=π+α(ρ≥0))
过点(a,0),
与极轴垂直
__ρcos__θ__=a
过点,
与极轴平行
__ρsin__θ__=a
(0<θ<π)
(2)一般位置的直线的极坐标方程:若直线l经过点M(ρ0,θ0),且极轴到此直线的角为α,直线l的极坐标方程为:
__ρsin(α-θ)=ρ0sin(α-θ0)__.
5.半径为r的圆的极坐标方程
(1)特殊位置的圆的极坐标方程:
圆心
极坐标方程
图 形
(0,0)
ρ=__r__
(0≤θ<2π)
(r,0)
ρ=__2rcos__θ__
ρ=2rsin θ
(0≤θ<π)
(r,π)
ρ=-2rcosθ
ρ=-2rsin θ
(π≤θ<2π)
(2)一般位置圆的极坐标方程:若圆心为M(ρ0,θ0),半径为r,则圆的极坐标方程是ρ2-2ρ0ρcos(θ-θ0)+ρ-r2=0.
典 例 剖 析 【P167】
考点1 平面直角坐标系下图形的伸缩变换
将圆x2+y2=1上每一点的横坐标保持不变,纵坐标变为原来的2倍,得曲线C.
(1)写出C的参数方程;
(2)设直线l:2x+y-2=0与C的交点为P1,P2,以坐标原点为极点,x轴正半轴为极轴建立极坐标系,求过线段P1P2的中点且与l垂直的直线的极坐标方程.
【解析】(1)设(x1,y1)为圆上的点,在已知变换下变为曲线C上的点(x,y),依题意,得
由x+y=1得x2+=1,
即曲线C的方程为x2+=1.
故C的参数方程为(t为参数).
(2)由解得或
不妨设P1(1,0),P2(0,2),则线段P1P2的中点坐标为,所求直线的斜率为k=,
于是所求直线方程为y-1=,
化为极坐标方程,并整理得2ρcos θ-4ρsin θ=-3,
即ρ=.
【点评】1.解答该类问题应明确两点:一是根据平面直角坐标系中的伸缩变换公式的意义与作用;二是明确变换前的P(x,y)与变换后的点P′(x′,y′)的坐标关系,利用方程思想求解.
2.求交点坐标,得直线方程,最后化为极坐标方程,其实质是将x=ρcos θ,y=ρsin θ代入转化.
考点2 极坐标与直角坐标的互化
在极坐标系下,已知圆O:ρ=cos θ+sin θ和直线l:ρsin=.
(1)求圆O和直线l的直角坐标方程;
(2)当θ∈(0,π)时,求直线l与圆O公共点的一个极坐标.
【解析】(1)圆O:ρ=cos θ+sin θ,即ρ2=ρcos θ+ρsin θ,
圆O的直角坐标方程为:x2+y2=x+y,
即x2+y2-x-y=0.
直线l:ρsin=,即ρsin θ-ρcos θ=1,
则直线l的直角坐标方程为:y-x=1,即x-y+1=0.
(2)由得故直线l与圆O公共点的一个极坐标为.
【点评】1.进行极坐标方程与直角坐标方程互化的关键是抓住互化公式:x=ρcosθ,y=ρsin θ,ρ2=x2+y2,tan θ=(x≠0).
2.进行极坐标方程与直角坐标方程互化时,注意ρ,θ的取值范围及其影响;善于对方程进行合理变形,并重视公式的逆向与变形使用;灵活运用代入法和平方法等技巧.
考点3 极坐标方程的应用
在直角坐标系xOy中,直线C1:x=-2,圆C2:(x-1)2+(y-2)2=1,以坐标原点为极点,x轴的正半轴为极轴建立极坐标系.
(1)求C1,C2的极坐标方程;
(2)若直线C3的极坐标方程为θ=(ρ∈R),设C2与C3的交点为M,N,求△C2MN的面积.
【解析】(1)因为x=ρcos θ,y=ρsin θ,
所以C1的极坐标方程为ρcosθ=-2,
C2的极坐标方程为ρ2-2ρcos θ-4ρsin θ+4=0.
(2)将θ=代入ρ2-2ρcos θ-4ρsin θ+4=0,
得ρ2-3ρ+4=0,解得ρ1=2,ρ2=.
故ρ1-ρ2=,即|MN|=.
由于C2的半径为1,所以△C2MN为等腰直角三角形,
所以△C2MN的面积为.
【点评】(1)已知极坐标系方程讨论位置关系时,可以先化为直角坐标方程;(2)在曲线的方程进行互化时,一定要注意变量的范围,注意转化的等价性.
方 法 总 结 【P168】
1.点M(ρ,θ)的极坐标通式是(ρ,θ+2kπ)或(-ρ,θ+2kπ+π)(k∈Z).如果限定ρ>0,0≤θ<2π或-π<θ≤π,那么除极点外,平面内的点和极坐标(ρ,θ)一一对应.
2.极坐标和直角坐标的互化公式是或.这两组公式必须满足下面的“三个条件”才能使用:(1)原点与极点重合;(2)x轴正半轴与极轴重合;(3)长度单位相同.极坐标和直角坐标的互化中,需注意等价性,特别是两边乘以ρn时,方程增了一个n重解ρ=0,要判断它是否是方程的解,若不是要去掉该解.
3.极坐标方程的应用及求法
(1)合理建立极坐标系,使所求曲线方程尽量简单.
(2)巧妙利用直角坐标系与极坐标系中坐标之间的互化公式,把问题转化为熟悉的知识解决问题.
(3)利用解三角形方法中正弦定理、余弦定理列出关于极坐标(ρ,θ)的方程是求极坐标系曲线方程的法宝.
(4)极坐标系内点的对称关系:①点P(ρ,θ)关于极点的对称点P′(ρ,θ±π);②点P(ρ,θ)关于极轴所在直线的对称点P′(ρ,-θ);③点P(ρ,θ)关于直线θ=的对称点为P′(ρ,π-θ);④点P(ρ,θ)关于直线θ=的对称点为P′.
4.极坐标系下A(ρ1,θ1),B(ρ2,θ2)间的距离公式|AB|=.
走 进 高 考 【P168】
(2016全国新课标Ⅰ)在直角坐标系xOy中,曲线C1的参数方程为(t为参数,a>0).在以坐标原点为极点,x轴的正半轴为极轴的极坐标系中,曲线C2:ρ=4cos θ.
(1)说明C1是哪一种曲线,并将C1的方程化为极坐标方程;
(2)直线C3的极坐标方程为θ=α0,其中α0满足tan α0=2,若曲线C1与C2的公共点都在C3上,求a.
【解析】(1)消去参数t得到C1的普通方程x2+(y-1)2=a2.
C1是以(0,1)为圆心,a为半径的圆.
将x=ρcos θ,y=ρsin θ代入C1的普通方程中,
得到C1的极坐标方程为ρ2-2ρsin θ+1-a2=0.
(2)曲线C1,C2的公共点的极坐标满足方程组
若ρ≠0,由方程组得16cos2θ-8sin θcos θ+1-a2=0,
由已知得tan θ=2,可得16cos2θ-8sin θcosθ=0,
从而1-a2=0,解得a=-1(舍去)或a=1.
当a=1时,极点也为C1,C2的公共点,在C3上,
所以a=1.
考 点 集 训 【P269】
A组题
1.求双曲线C:x2-=1经过φ:变换后所得曲线C′的焦点坐标.
【解析】设曲线C′上任意一点P′(x′,y′),
将代入x2-=1,
得-=1,化简得-=1,
即-=1为曲线C′的方程.
可见仍是双曲线,则焦点为F1(-5,0),F2(5,0).
2.已知直线l的极坐标方程为2ρsin=,点A的极坐标为,求点A到直线l的距离.
【解析】依题可知直线l:2ρsin=和点A的直角坐标表示法为l:x-y+1=0和A(2,-2),所以点A到直线l的距离为d==.
3.在极坐标系中,已知圆ρ=3cos θ与直线2ρcos θ+4ρsin θ+a=0相切,求实数a的值.
【解析】圆ρ=3cos θ的直角坐标方程为x2+y2=3x,
即+y2=,
直线2ρcos θ+4ρsin θ+a=0的直角坐标方程为2x+4y+a=0.
因为圆与直线相切,所以=,
解得a=-3±3.
4.在极坐标系中,已知圆C经过点P,圆心为直线ρsin=-与极轴的交点,求圆C的直角坐标方程.
【解析】在ρsin=-中,令θ=0,得ρ=1,
所以圆C的圆心坐标为(1,0).
因为圆C经过点P,
所以圆C的半径PC=
=1,
于是圆C过极点,所以圆C的极坐标方程为ρ=2cos θ.
则ρ2=2ρcos θ,∴x2+y2=2x,
故圆C的直角坐标方程为(x-1)2+y2=1.
5.在极坐标系中,P是曲线C1:ρ=12sin θ上的动点,Q是曲线C2:ρ=12cos上的动点,求|PQ|的最大值.
【解析】将曲线C1的极坐标方程化为直角坐标方程:
∵ρ=12sin θ,∴ρ2=12ρsin θ,∴x2+y2-12y=0,
即x2+(y-6)2=36.
将曲线C2的极坐标方程化为直角坐标方程:
∵ρ=12cos,
∴ρ2=12ρ,
∴x2+y2-6x-6y=0,∴(x-3)2+(y-3)2=36,
∴|PQ|max=6+6+=18.
6.已知直线l:ρsin=4和圆C:ρ=2kcos (k≠0),若直线l上的点到圆C上的点的最小距离等于2.求实数k的值并求圆心C的直角坐标.
【解析】∵ρ=kcos θ-ksin θ,
∴ρ2=kρcos θ-kρsin θ,
∴圆C的直角坐标方程为x2+y2-kx+ky=0,
即+=k2,
∴圆心的直角坐标为.
∵ρsin θ·-ρcos θ·=4,
∴直线l的直角坐标方程为x-y+4=0,
∴-|k|=2.
即|k+4|=2+|k|,
两边平方,得|k|=2k+3,
∴或
解得k=-1,故圆心C的直角坐标为.
B组题
1.已知圆O1和圆O2的极坐标方程分别为ρ=2,ρ2-2ρcos=2.
(1)将圆O1和圆O2的极坐标方程化为直角坐标方程;
(2)求经过两圆交点的直线的极坐标方程.
【解析】(1)由ρ=2知ρ2=4,所以x2+y2=4.
因为ρ2-2ρcos=2,
所以ρ2-2ρ=2.
所以x2+y2-2x-2y-2=0.
(2)将两圆的直角坐标方程相减,得经过两圆交点的直线方程为x+y=1.
化为极坐标方程为ρcos θ+ρsin θ=1,
即ρsin=.
2.在极坐标系中,已知直线l过点A(1,0),且其向上的方向与极轴的正方向所成的最小正角为,求:
(1)直线l的极坐标方程;
(2)极点到该直线的距离.
【解析】(1)如图,由正弦定理得
=.
即ρsin=sin=,
∴直线l的极坐标方程为ρsin=.
(2)作OH⊥l,垂足为H,
在△OHA中,OA=1,∠OHA=,∠OAH=,
则OH=OAsin=,
即极点到该直线的距离等于.
3.在极坐标系中,曲线C:ρ=2acos θ(a>0),l:ρcos=,曲线C与l有且仅有一个公共点.
(1)求a的值;
(2)O为极点,A,B为C上的两点,且∠AOB=,求|OA|+|OB|的最大值.
【解析】(1)曲线C是以(a,0)为圆心,以a为半径的圆;
l的直角坐标方程为x+y-3=0.
由直线l与圆C相切可得=a,解得a=1.
(2)不妨设A的极角为θ,B的极角为θ+,
则|OA|+|OB|=2cos θ+2cos
=3cos θ-sin θ=2cos,
当θ=-时,|OA|+|OB|取得最大值2.
4.在直角坐标系xOy中,以原点O为极点,x轴的正半轴为极轴建立极坐标系.已知曲线C1的极坐标方程为ρ2=,直线l的极坐标方程为ρ=.
(1)写出曲线C1与直线l的直角坐标方程;
(2)设Q为曲线C1上一动点,求Q点到直线l距离的最小值.
【解析】(1)C1:x2+2y2=2,l:y+x=4.
(2)设Q(cos θ,sin θ),则点Q到直线l的距离
d==≥=,
当且仅当θ+=2kπ+,
即θ=2kπ+(k∈Z)时,
Q点到直线l距离的最小值为.
第74讲 参数方程
夯实基础 【P169】
【学习目标】
1.了解曲线参数方程的意义,掌握直线、圆及圆锥曲线的参数方程,会应用参数方程解决有关的问题.
2.掌握参数方程与普通方程的互化,会根据已知给出的参数,依据条件建立参数方程.
【基础检测】
1.将参数方程(θ为参数)化为普通方程为( )
A.y=x-2 B.y=x+2
C.y=x-2(2≤x≤3) D.y=x+2(0≤y≤1)
【解析】消去参数,转化为普通方程得y=x-2,其中x∈[2,3],y∈[0,1].故选C.
【答案】C
2.参数方程(t为参数)表示的曲线是________.
【解析】由x=t+知x≥2或x≤-2,
∴曲线方程为y=2(x≥2或x≤-2),表示两条射线.
【答案】两条射线
3.在平面直角坐标系xOy中,过椭圆(θ为参数)的右焦点,且与直线(t为参数)平行的直线截椭圆所得的弦长为________.
【解析】椭圆的普通方程为+=1,则右焦点的坐标为(1,0).
直线的普通方程为x-2y+2=0,过点(1,0)与直线x-2y+2=0平行的直线方程为x-2y-1=0.
由得4x2-2x-11=0,所以所求的弦长为×=.
【答案】
4.已知直线l1:(t为参数)与直线l2:(s为参数)垂直,求k的值.
【解析】直线l1的普通方程为y=-x+,斜率为-;
直线l2的普通方程为y=-2x+1,斜率为-2.
∵l1与l2垂直,
∴×(-2)=-1⇒k=-1.
【知识要点】
1.参数方程的定义
在平面直角坐标系中,如果曲线上任意一点的坐标x,y都是某个变数t的函数,即____,并且对于t的每一个允许值,由该方程组所确定的点M(x,y)都在这条曲线上,那么此方程组就叫做这条曲线的参数方程,联系变数x,y的变数t叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程F(x,y)=0叫做普通方程.
2.参数方程和普通方程的互化
由参数方程化为普通方程:__消去参数__,消参数的方法有代入法、加减(或乘除)消元法、三角代换法等.如果知道变数x,y中的一个与参数t的关系,例如x=f(t),把它代入普通方程,求出另一个变数与参数的关系y=g(t),那么就是曲线的参数方程,在参数方程与普通方程的互化中,必须使x,y的取值范围保持一致.
3.直线、圆锥曲线的普通方程和参数方程
轨迹
普通方程
参数方程
直线
y-y0=tan α(x-x0)
(t为参数)
圆
(x-a)2+(y-b)2=r2
(θ为参数)
椭圆
+=1(a>b>0)
(θ为参数)
双曲线
-=1
(θ为参数)
抛物线
y2=2px(p>0)
(t为参数)
典 例 剖 析 【P169】
考点1 参数方程与普通方程的互化
已知曲线C的参数方程是(α为参数),直线l的参数方程为(t为参数),
(1)求曲线C与直线l的普通方程;
(2)若直线l与曲线C相交于P,Q两点,且|PQ|=,求实数m的值.
【解析】(1)由得
①的平方加②的平方得曲线C的普通方程为:
x2+(y-m)2=1.
由x=1+t,得t=x-1,代入y=4+t得
y=4+2(x-1),
所以直线l的普通方程为y=2x+2.
(2)圆心(0,m)到直线l的距离为d=,
所以由勾股定理得+=1,
解得m=3或m=1.
【点评】1.将参数方程化为普通方程,消参数常用代入法与加减消元法.
2.把参数方程化为普通方程时,要注意哪一个量是参数,以及参数的取值对普通方程中x及y的取值范围的影响.
考点2 直线与圆的参数方程及应用
在直角坐标系xOy中,曲线C1:(t为参数,t≠0),其中0≤α<π.在以O为极点,x轴正半轴为极轴的极坐标系中,曲线C2:ρ=2sin θ,C3:ρ=2cos θ.
(1)求C2与C3的交点的直角坐标;
(2)若C1与C2相交于点A,C1与C3相交于点B,求|AB|的最大值.
【解析】(1)曲线C2的直角坐标方程为x2+y2-2y=0,
曲线C3的直角坐标方程为x2+y2-2x=0.
联立
解得或
所以C2与C3交点的直角坐标为(0,0)和.
(2)曲线C1的极坐标方程为θ=α(ρ∈R,ρ≠0),其中0≤α<π.
因此A的极坐标为(2sin α,α),B的极坐标为(2cos α,α).
所以|AB|=|2sin α-2cos α|=4.
当α=时,|AB|取得最大值,最大值为4.
【点评】(1)过定点P0(x0,y0),倾斜角为α的直线参数方程的标准式为(t为参数),t的几何意义是直线上的点P到点P0(x0,y0)的数量,即|t|=|PP0|时为距离.使用该式时直线上任意两点P1、P2对应的参数分别为t1、t2,则|P1P2|=|t1-t2|,P1P2的中点对应的参数为(t1+t2).
(2)对于形如(t为参数),当a2+b2≠1时,应先化为标准形式后才能利用t的几何意义解题.
考点3 参数方程与极坐标方程的综合问题
极坐标系与直角坐标系xOy取相同的长度单位,以原点O为极点,以x轴正半轴为极轴.已知直线l的参数方程为(t为参数).曲线C的极坐标方程为ρsin2θ=8cos θ.
(1)求曲线C的直角坐标方程;
(2)设直线l与曲线C交于A,B两点,与x轴的交点为F,求+的值.
【解析】(1)由ρsin2θ=8cos θ得,ρ2sin2θ=8ρcos θ,
∴曲线C的直角坐标方程为y2=8x.
(2)易得直线l与x轴的交点为F(2,0),
将直线l的方程代入y2=8x,
得(tsin α)2=8(2+tcos α),
整理得sin2α·t2-8cos α·t-16=0.
由已知sin α≠0,
Δ=(-8cos α)2-4×(-16)sin2α=64>0,
∴t1+t2=,t1t2=-<0,
故+=|-|=||===.
【点评】利用椭圆的参数方程求最值,一般是将相关量利用(θ为参数)转化为三角函数,结合三角函数有关公式,求最值.
方法总结 【P170】
1.选取参数时的一般原则是:(1)x,y与参数的关系较明显,并列出关系式;(2)当参数取一值时,可唯一的确定x,y的值;(3)在研究与时间有关的运动物体时,常选时间作为参数;在研究旋转物体时,常选用旋转角作为参数;此外,也常用线段的长度、倾斜角、斜率、截距等作为参数.
2.求曲线的参数方程常常分成以下几步:(1)建立直角坐标系,在曲线上设任意一点P(x,y);(2)选择适当的参数;(3)找出x,y与参数的关系,列出解析式;(4)证明(常常省略).
3.根据直线的参数方程标准式中t的几何意义,有如下常用结论:(1)若M1,M2为l上任意两点,M1,M2对应t的值分别为t1,t2,则|M1M2|=|t1-t2|;(2)若M0为线段M1M2的中点,则有t1+t2=0;(3)若线段M1M2的中点为M,则M0M=tM=.一般地,若点P分线段M1M2所成的比为λ,则tP=.
4.直线的参数方程的一般式(t为参数),是过点M0(x0,y0),斜率为的直线的参数方程.当且仅当a2+b2=1且b≥0时,才是标准方程,t
才具有标准方程中的几何意义.将非标准方程化为标准方程是(t′∈R),式中“±”号,当a,b同号时取正;当a,b异号时取负.
5.参数方程与普通方程互化时,要注意:(1)不是所有的参数方程都能化为普通方程;(2)在化参数方程为普通方程时变量的范围不能扩大或缩小;(3)把普通方程化为参数方程时,由于参数选择的不同而不同,参数的选择是由具体的问题来决定的.
6.在已知圆、椭圆、双曲线和抛物线上取一点可考虑用其参数方程设定点的坐标,将问题转化为三角函数问题求解.
7.在直线与圆和圆锥曲线位置关系问题中,涉及距离问题探求可考虑应用直线参数方程中参数的几何意义求解.
8.在求某些动点的轨迹方程时,直接寻找x,y的关系困难,甚至找不出时,可以通过引入参数,建立动点的参数方程后求解.
走 进 高 考 【P170】
1.(2016全国Ⅱ)在直角坐标系xOy中,圆C的方程为(x+6)2+y2=25.
(1)以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,求C的极坐标方程;
(2)直线l的参数方程是(t为参数),l与C交于A,B两点,|AB|=,求l的斜率.
【解析】(1)由x=ρcos θ,y=ρsin θ可得圆C的极坐标方程为ρ2+12ρcos θ+11=0.
(2)在(1)中建立的极坐标系中,直线l的极坐标方程为θ=α(ρ∈R).
设A,B所对应的极径分别为ρ1,ρ2,将l的极坐标方程代入圆C的极坐标方程得ρ2+12ρcos α+11=0,
于是ρ1+ρ2=-12cos α,ρ1ρ2=11,
所以|AB|=|ρ1-ρ2|==.
由|AB|=,得cos2α=,则tan α=±,
所以l的斜率为或-.
考 点 集 训 【P271】
A组题
1.求直线(t为参数)被曲线(θ为参数)所截得的弦长.
【解析】直线方程可化为x+y-=0,
曲线方程可化为x2+=1.
由得x2-x=0,∴x=0或x=1.
可得交点为A(0,),B(1,0).
∴AB==2.
∴所截得的弦长为2.
2.直线(t为参数)与圆(θ为参数)相切,求切线的倾斜角.
【解析】直线的普通方程为bx-ay-4b=0,圆的普通方程为(x-2)2+y2=3,直线与圆相切,则圆心(2,0)到直线的距离为,从而有=,即3a2+3b2=4b2,∴b=±a,而直线的倾斜角的正切值为tan α=,∴tan α=±,因此切线的倾斜角为或.
3.已知直角坐标系xOy中,直线l的参数方程:(t为参数),以直角坐标系的原点O为极点,x轴的非负半轴为极轴建立极坐标系,求以极点为圆心且与直线l相切的圆的极坐标方程.
【解析】∵直线l的直角坐标方程为x-y+=0.
∴原点到直线的距离r==1.
∴以极点为圆心且与直线l相切的圆的极坐标方程为ρ=1.
4.在直角坐标系xOy中,以O为极点,x轴的正半轴为极轴建立极坐标系.已知直线l的极坐标方程为ρ(sin θ-3cos θ)=0,曲线C的参数方程为(t为参数),l与C相交于A,B两点,求AB的长.
【解析】直线l的极坐标方程ρ(sin θ-3cos θ)=0化为直角坐标方程为3x-y=0,曲线C的参数方程两式经过平方相减,化为普通方程为y2-x2=4,联立解得或
所以A,B.
所以|AB|==2.
5.已知曲线C1的参数方程是(φ为参数),以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,曲线C2的极坐标方程是ρ=2,正方形ABCD的顶点都在C2上,且A,B,C,D依逆时针次序排列,点A的极坐标为.
(1)求点A,B,C,D的直角坐标;
(2)设P为C1上任意一点,求|PA|2+|PB|2+|PC|2+|PD|2的取值范围.
【解析】(1)由已知可得A,
B,
C,
D,
即A(1,),B(-,1),C(-1,-),D(,-1).
(2)设P(2cos φ,3sin φ),
令S=|PA|2+|PB|2+|PC|2+|PD|2,
则S=16cos2φ+36sin2φ+16=32+20sin2φ.
因为0≤sin2φ≤1,所以S的取值范围是[32,52].
6.在平面直角坐标系中,以坐标原点O为极点,x轴的正半轴为极轴建立极坐标系.已知直线l上两点M,N的极坐标分别为(2,0),,圆C的参数方程为(θ为参数).
(1)设P为线段MN的中点,求直线OP的平面直角坐标方程;
(2)判断直线l与圆C的位置关系.
【解析】(1)由题意知,M,N的平面直角坐标分别为(2,0),
.又P为线段MN的中点,
从而点P的平面直角坐标为,
故直线OP的直角坐标方程为y=x.
(2)因为直线l上两点M,N的平面直角坐标分别为(2,0),,
所以直线l的平面直角坐标方程为x+3y-2=0.
又圆C的圆心坐标为(2,-),半径r=2,
圆心到直线l的距离d==<r.
故直线l与圆C相交.
B组题
1.在直角坐标系xOy中,曲线C1的参数方程为(t为参数),以原点为极点,以x轴正半轴为极轴,建立极坐标系,曲线C2的极坐标方程为ρ=.
(1)求曲线C1的普通方程与曲线C2的直角坐标方程;
(2)设点M(2,-1),曲线C1与曲线C2交于A,B两点,求|MA|·|MB|的值.
【解析】(1)两式相加消去参数t可得曲线C1的普通方程y=-x+1,
由曲线C2的极坐标方程得ρ2=⇒ρ2+3ρ2sin2θ=4,
整理可得曲线C2的直角坐标方程为+y2=1.
(2)由(1)知曲线C1的方程为y=-x+1,
且点M(2,-1)在曲线C1上,所以把直线C1的参数方程化为(s为参数)与曲线C2的方程联立可得:
5s2-12s+8=0,
利用根与系数的关系可得|MA|·|MB|=s1·s2=.
2.已知曲线C1的极坐标方程为ρ2=,曲线C1经过坐标变换得到曲线C2,直线l的参数方程为(t为参数,t∈R).
(1)求直线l的普通方程和曲线C1的直角坐标方程;
(2)若P为曲线C2上的点,求点P到直线l的距离的最大值.
【解析】(1)直线l的普通方程为x-y-2=0,曲线C1的直角坐标方程为3x2+4y2=12,
即+=1.
(2)由题意知,曲线C2的方程为x′2+y′2=1,其圆心C2(0,0),半径r=1,
所以圆心C2到直线l的距离d==,所以点P到直线l的距离的最大值为d+1=+1.
3.已知曲线C的极坐标方程是ρ=4cos θ.以极点为平面直角坐标系的原点,极轴为x轴的正半轴,建立平面直角坐标系,直线l的参数方程是(t是参数).
(1)若直线l与曲线C相交于A、B两点,且|AB|=,试求实数m的值.
(2)设M(x,y)为曲线C上任意一点,求x+y的取值范围.
【解析】(1)曲线C的极坐标方程是ρ=4cos θ,化为直角坐标方程为x2+y2-4x=0,
直线l的直角坐标方程为y=x-m.
由|AB|=,得圆心到直线l的距离(弦心距)d==,于是=,
∴|m-2|=1,∴m=1或m=3.
(2)曲线C的方程可化为(x-2)2+y2=4,其参数方程为
(θ为参数).
∵M(x,y)为曲线C上任意一点,
∴x+y=2+2sin,
∴x+y的取值范围是[2-2,2+2].
4.在平面直角坐标系xOy中,动圆x2+y2-4xcos θ-4ysin θ+7cos2θ-8=0(θ∈R,θ为参数)的圆心轨迹为曲线C,点P在曲线C上运动.以O为极点,x轴的正半轴为极轴建立极坐标系,若直线l的极坐标方程为2ρcos=3,求点P到直线l的最大距离.
【解析】将动圆的方程配方,得
(x-2cos θ)2+(y-2sin θ)2=9+3sin2θ,
设圆心(x,y),则(θ∈R,θ为参数),
即曲线C的参数方程为(θ∈R,θ为参数),
直线l的直角坐标方程为x-y-3=0,
设点P(x1,y1),则(θ∈R,θ为参数),点P到直线l的距离d=
=,
其中tan φ=-.
∴当sin(θ+φ)=-1时,点P到直线l的距离d取得最大值.