

- 697.26 KB
- 2021-11-06 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
1
专题 11 简单机械
真题再现
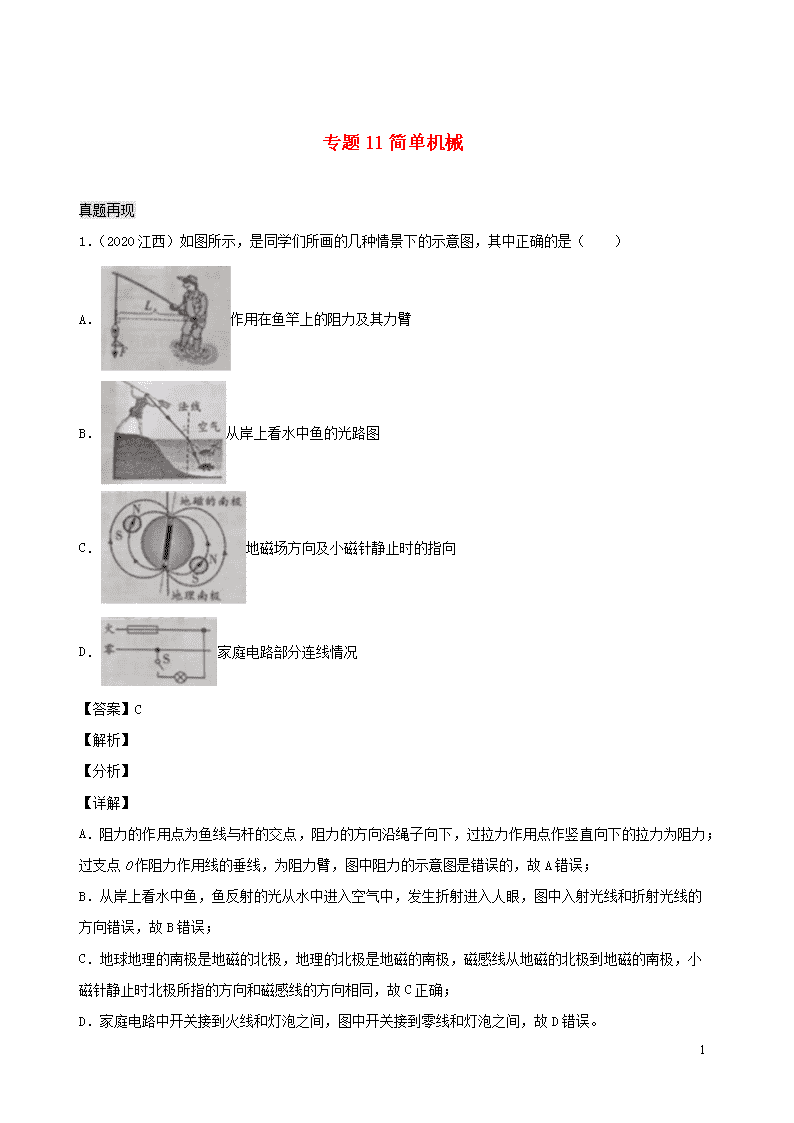
1.(2020 江西)如图所示,是同学们所画的几种情景下的示意图,其中正确的是( )
A. 作用在鱼竿上的阻力及其力臂
B. 从岸上看水中鱼的光路图
C. 地磁场方向及小磁针静止时的指向
D. 家庭电路部分连线情况
【答案】C
【解析】
【分析】
【详解】
A.阻力的作用点为鱼线与杆的交点,阻力的方向沿绳子向下,过拉力作用点作竖直向下的拉力为阻力;
过支点 O 作阻力作用线的垂线,为阻力臂,图中阻力的示意图是错误的,故 A 错误;
B.从岸上看水中鱼,鱼反射的光从水中进入空气中,发生折射进入人眼,图中入射光线和折射光线的
方向错误,故 B 错误;
C.地球地理的南极是地磁的北极,地理的北极是地磁的南极,磁感线从地磁的北极到地磁的南极,小
磁针静止时北极所指的方向和磁感线的方向相同,故 C 正确;
D.家庭电路中开关接到火线和灯泡之间,图中开关接到零线和灯泡之间,故 D 错误。
2
故选 C。
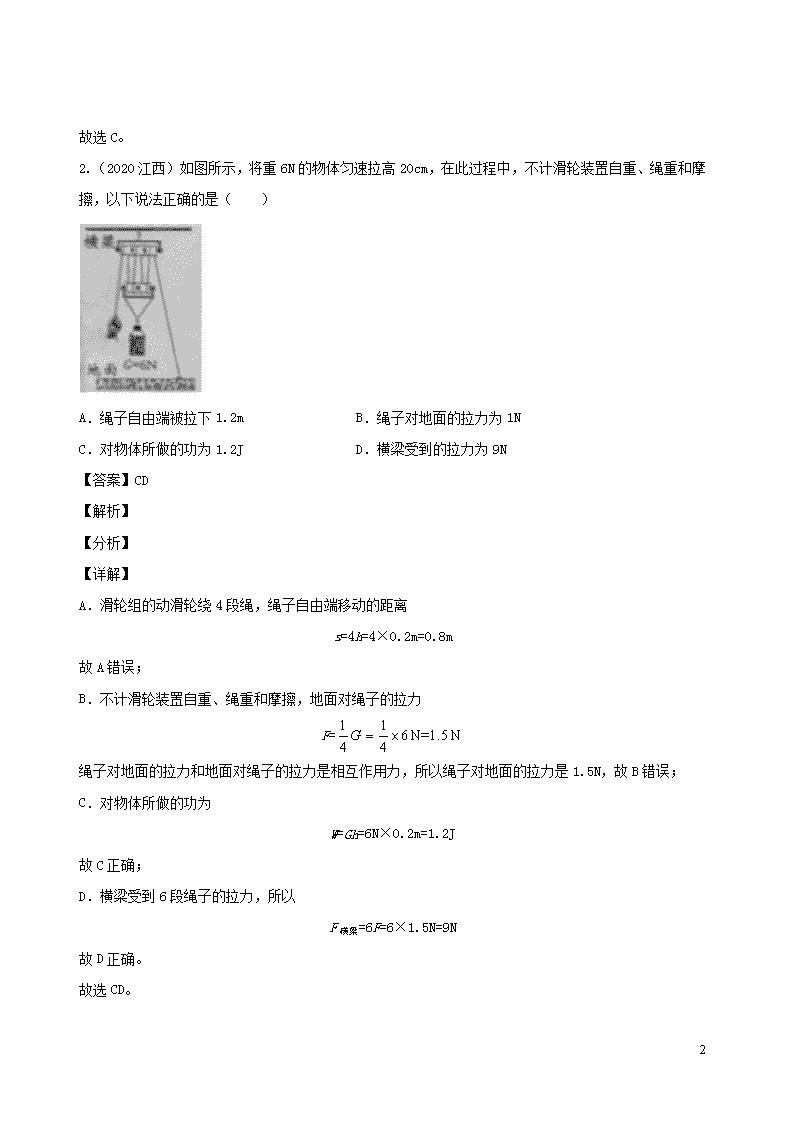
2.(2020 江西)如图所示,将重 6N 的物体匀速拉高 20cm,在此过程中,不计滑轮装置自重、绳重和摩
擦,以下说法正确的是( )
A.绳子自由端被拉下 1.2m B.绳子对地面的拉力为 1N
C.对物体所做的功为 1.2J D.横梁受到的拉力为 9N
【答案】CD
【解析】
【分析】
【详解】
A.滑轮组的动滑轮绕 4 段绳,绳子自由端移动的距离
s=4h=4×0.2m=0.8m
故 A 错误;
B.不计滑轮装置自重、绳重和摩擦,地面对绳子的拉力
F= 1 1 6N=1.5N4 4G
绳子对地面的拉力和地面对绳子的拉力是相互作用力,所以绳子对地面的拉力是 1.5N,故 B 错误;
C.对物体所做的功为
W=Gh=6N×0.2m=1.2J
故 C 正确;
D.横梁受到 6 段绳子的拉力,所以
F 横梁=6F=6×1.5N=9N
故 D 正确。
故选 CD。
3
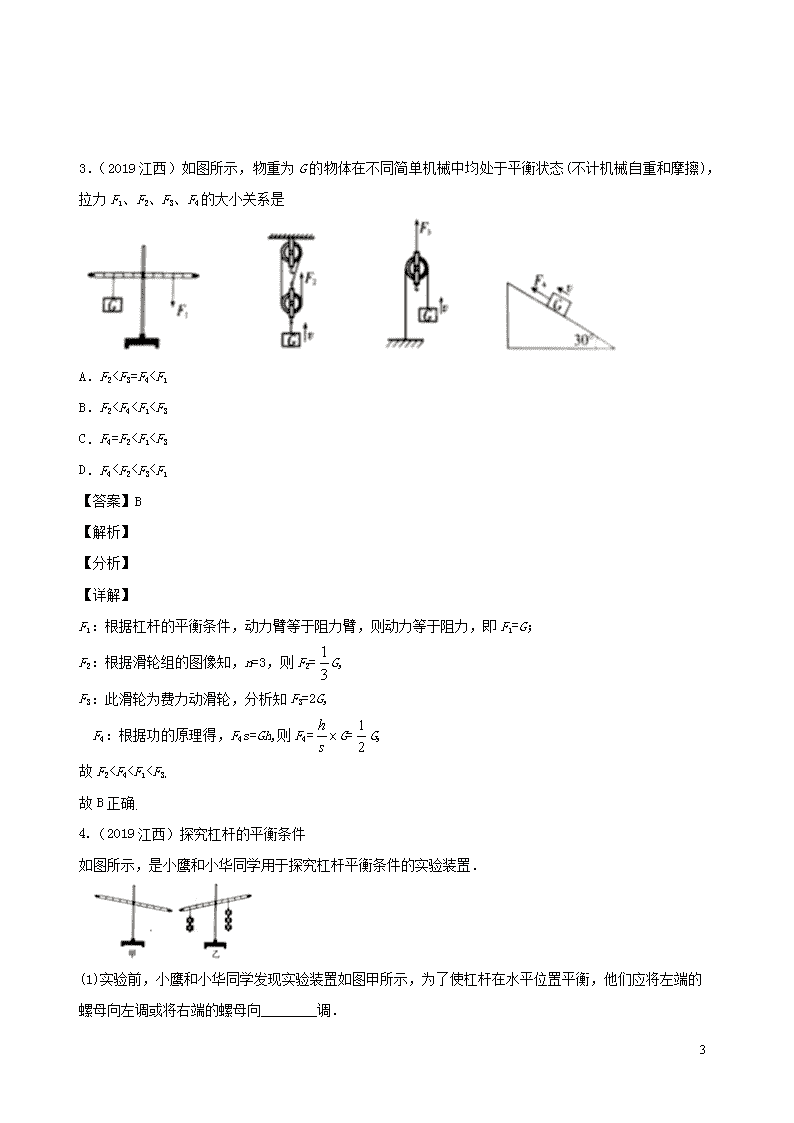
3.(2019 江西)如图所示,物重为 G 的物体在不同简单机械中均处于平衡状态(不计机械自重和摩擦),
拉力 F1、F2、F3、F4 的大小关系是
A.F2 500NBF ( )
因为人的最大拉力等于体重 500N,因此配重不可能匀速拉起,故 D 错误。
故选 C。
15.(2020·浙江宁波� 初三一模)如图甲所示,我国“向阳红 09”母船正在进行投放“蛟龙号”载人
深潜器试验,调控两根伸缩杆,使“∩”形架绕固定在甲板上的转轴转动至图甲所示位置时停止,然后
14
由固定在“∩”形架顶部的绞车通过钢缆释放深潜器.
处在图甲所示位置的“∩”形架可以简化为图乙中以 O 为支点的杠杆,OB 表示“∩”形架,CD 表示两
根伸缩杆,O 到 CD 的距离为 2m,OD、OE 的长度分别为 3m、6m.不考虑“∩”形架、两根伸缩杆和绞车
的重力.
(1)请在图乙中画出投放深潜器时“∩”形架的动力和阻力示意图
(2)深潜器的质量为 25t,总体积为 24.5m3.在绞车缓慢向下释放深潜器至刚浸没的过程中,两根伸缩
杆的总拉力最多减少多少牛?
【答案】(1) (2)7.35×105N
【解析】
【分析】
【详解】
(1)杠杆 OB 受到的动力是伸缩杆对杠杆的力,方向沿伸缩杆方向向下,阻力是深潜器的重力,方向竖
直向下,故“∩”形架的动力和阻力示意图:
15
(2)深潜器入水前,BE 的拉力
F2=G=mg=25×1000kg×10N/kg=2.5×105N
深潜器入水后,BE 的拉力
F2′=G﹣F 浮=G﹣ρ水 gV 排=2.5×105N﹣1.0×103kg/m3×10N/kg×24.5m3=5×103N
根据杠杆平衡条件,深潜器入水前,两根伸缩杆的总拉力
F1=
5
2 2
1
2.5 10 N 6m= 2m
F L
L
=7.5×105N
深潜器入水后,两根伸缩杆的总拉力
F1′=
3
2 2
1
5 10 6m
2m
F
F
L =1.5×104N
两根伸缩杆的总拉力最多减少
F=F1﹣F1′=7.5×105N﹣1.5×104N=7.35×105N
16.(2020·哈尔滨市第十七中学校初三一模)如图所示,请在图中画出阻力和最小的动力 F__。
16
【答案】
【解析】
【分析】
【详解】
阻力为重物对杠杆对杠杆的拉力,方向为竖直向下。由题可知,阻力和阻力臂一定,根据杠杆平衡条件,
要求出最小动力,就要找到最长的动力臂,本图中,最长的动力臂即为杠杆的长,所以最小动力 F 如图
所示。
17.(2020·西安市铁一中学初三三模)如图甲所示的是一种核桃钳,向内握的手柄,凹槽就能将核桃
夹碎。该核桃钳可看作由两个杠杆组成,图乙是其中一个杠杆 OBA 的简化图,请在图乙画出:在 A 点
施加的最小动力 F1 及其动力臂 L1。
17
【答案】
【解析】
【分析】
【详解】
由杠杆平衡公式 1 1 2 2Fl F l 得 2 2
1
1
F lF l
,在 F2 和 L2 两个量不变的条件下,最小动力 F1 与最长动力臂 L1
对应,第一步连接 O 点和 A 点,OA 的长度即最长动力臂 L1,第二步过 A 点作最小动力 F1 且垂直于 OA,
标上垂直符号以及动力臂 L1,如下图所示:
。
18.(2020·广东濠江� 初三一模)如图所示,用滑轮组提升重物用笔画线代替绳子在图中画出最省力
的绳绕法.
(____)
18
【答案】
【解析】
【分析】
【详解】
对由一个动滑轮和一个定滑轮组成的滑轮组,可绕线方法有两股和三股两种,两种方法都达到了省力的
目的,但拉力的方向不同,有三股绕线的方法拉力方向向上;有两股绕线的方法拉力方向向下,在不计
滑轮自重及摩擦的情况下,动滑轮和重物由几股绳子承担,拉力就是滑轮组提升物重的几分之一.由此
可知绳子股数越多越省力,根据题意滑轮组最省力的绕法是绳子股数最多,即三股绕线的方法.
19.(2020·广西初三其他)如图所示为吃核桃时使用的一种工具“碎核桃杯”。只要轻轻用力握下手柄,
核桃坚硬的外壳就会被压碎。“碎核桃杯”的手柄相当于一个______(“省力”、“等臂”或“费力”)杠
杆,核桃的碎片在______作用下落到杯底。
【答案】省力重力
【解析】
【分析】
【详解】
[1]由图可知,“碎核桃杯”的手柄在使用过程中,动力臂大于阻力臂,属于省力杠杆。
[2]核桃的碎片在重力的作用下落到杯底。
20.(2020·辽宁大东� 初三二模)小明和小亮所在的物理小组利用刻度均匀的轻质杠杆探究杠杆的平
衡条件,实验前没挂钩码时,杠杆静止的位置如图甲所示,此时应将平衡螺母向______(选填左或右)
调节,使杠杆在水平位置平衡。
19
(1)小明调节杠杆水平平衡后,在左右两侧分别挂上钩码(每个钩码质量相同),如图乙所示。松手后杠
杆的______(选填“左”或“右”)端会下沉。要是杠杆重新在水平位置平衡,如果不改变钩码总数目
和悬挂点位置,需要如何操作______;
(2)小亮调节杠杆水平平衡后,设计了如图所示的方案,探究杠杆的平衡条件。如果在操作过程中,将
弹簧测力计从竖直方向慢慢向左倾斜,则弹簧测力计的示数将______(选填“变小”、“变大”或“不变”)。
【答案】右左将左端的一个钩码挂在右端变大
【解析】
【分析】
【详解】
[1]为了使杠杆在水平位置平衡,需要将平衡螺母向上翘的一端移动,如图甲所示,应将平衡螺母向右
调节,使杠杆在水平位置平衡。
(1)[2]若一个钩码重 G,一个小格长度为 l,如图乙所示,则支点左侧
4 2 8G l Gl =
右侧
3 3G l Gl =
松手后杠杆的左侧会下沉。
[3]要使杠杆重新在水平位置平衡,如果不改变钩码总数目和悬挂点位置,根据杠杆的平衡条件,应将
左端的一个钩码挂在右端。
(2)[4]小亮调节杠杆在如丙图位置水平平衡后,将弹簧测力计从竖直方向慢慢向左倾斜,会使测力计拉
力的力臂减小,根据杠杆平衡条件,弹簧测力计的示数将变大。