

- 224.03 KB
- 2022-07-28 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
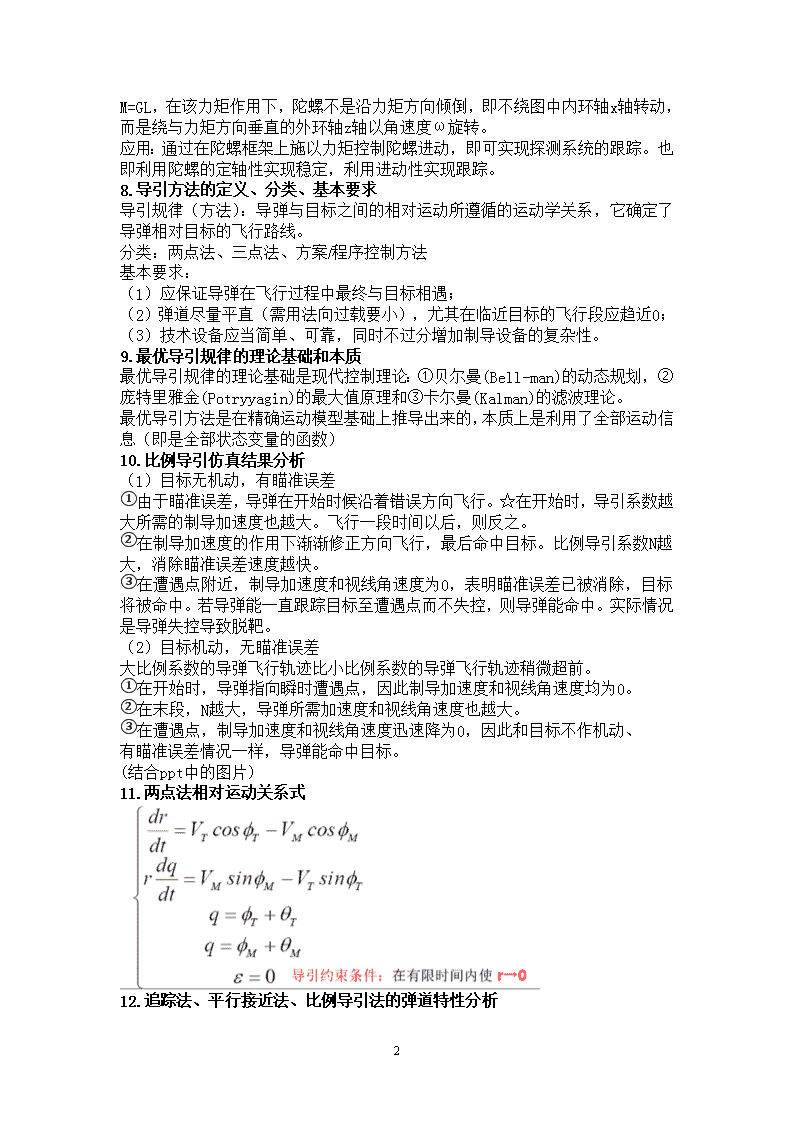
1.导弹的主要组成部分及其功能(1)战斗部(弹头):摧毁目标(2)发动机(运载系统):提供导弹运动的动力(3)制导系统:引导导弹准确地击中目标(4)弹体:把导弹的各部分连接起来(5)供电系统(弹上电源):给弹上各分系统供给正常工作所需要的电能,主要包括电源、各种配电、变电装置等2.火箭、火箭武器、导弹的定义与区别火箭与火箭武器:火箭是依靠自身动力装置(火箭发动机)推进的飞行器。火箭可根据不同的用途而装有各种不同的有效载荷,当火箭的有效载荷为战斗部系统时,就称之为火箭武器。导弹与火箭武器:导弹是一种飞行武器,它载有战斗部,依靠自身动力装置推进,由制导系统导引、控制其飞行轨迹,并将其导向目标。显然,可控的火箭武器是导弹,但并不是所有的导弹都是可控火箭武器,这是因为导弹的动力装置不一定都是火箭发动机。3.导弹从发射至毁伤目标整个过程的阶段划分(1)发射控制段(A)发现目标并精确地确定其坐标—雷达站完成(B)确定发射瞬间导弹指向—引导指挥站中的计算机(C)发射前各项装置的起动与联络—借助有关通信设备完成(2)飞行控制段制导与控制系统引导导弹按预定飞行路线飞行直至击中目标。(3)爆炸控制段(A)适时引爆战斗部(B)毁伤目标4.制导与控制系统的构成及特点制导与控制系统作为制导武器的核心特征,特点是闭环系统5.制导与控制过程描述①目标/导弹跟踪器对目标和导弹进行跟踪,测出两者的飞行参数,并输送给制导计算机;②制导计算机计算得出命中目标所必须采取的运动学要求,并将此信息输送给控制系统;③控制系统控制有关控制面进行机动,使制导武器命中目标。6.地形匹配制导原理基本原理:利用地形识别技术,将导弹当时弹道下的实测地形特征和预定弹道下的已知地形特征相比较确定导弹位置与偏离误差,形成导引信号,使导弹准确地按预定路线导向目标。7.陀螺的特性(定轴、进动)及应用①陀螺的定轴性:将高速旋转的陀螺安装在一个由内环、外环构成的万向支架上,可以使陀螺转子指向任何一个方向,如果没有外力的作用,万向支架又没有摩擦力矩,则无论万向支架的支座(如导弹弹体)如何转动、摆动,转子轴在惯性空间方向保持恒定。②陀螺的进动:三自由度陀螺转子高速旋转时,在陀螺的内环轴臂上加一力矩10\nM=GL,在该力矩作用下,陀螺不是沿力矩方向倾倒,即不绕图中内环轴x轴转动,而是绕与力矩方向垂直的外环轴z轴以角速度ω旋转。应用:通过在陀螺框架上施以力矩控制陀螺进动,即可实现探测系统的跟踪。也即利用陀螺的定轴性实现稳定,利用进动性实现跟踪。8.导引方法的定义、分类、基本要求导引规律(方法):导弹与目标之间的相对运动所遵循的运动学关系,它确定了导弹相对目标的飞行路线。分类:两点法、三点法、方案/程序控制方法基本要求:(1)应保证导弹在飞行过程中最终与目标相遇;(2)弹道尽量平直(需用法向过载要小),尤其在临近目标的飞行段应趋近0;(3)技术设备应当简单、可靠,同时不过分增加制导设备的复杂性。9.最优导引规律的理论基础和本质最优导引规律的理论基础是现代控制理论:①贝尔曼(Bell-man)的动态规划,②庞特里雅金(Potryyagin)的最大值原理和③卡尔曼(Kalman)的滤波理论。最优导引方法是在精确运动模型基础上推导出来的,本质上是利用了全部运动信息(即是全部状态变量的函数)10.比例导引仿真结果分析(1)目标无机动,有瞄准误差①由于瞄准误差,导弹在开始时候沿着错误方向飞行。☆在开始时,导引系数越大所需的制导加速度也越大。飞行一段时间以后,则反之。②在制导加速度的作用下渐渐修正方向飞行,最后命中目标。比例导引系数N越大,消除瞄准误差速度越快。③在遭遇点附近,制导加速度和视线角速度为0,表明瞄准误差已被消除,目标将被命中。若导弹能一直跟踪目标至遭遇点而不失控,则导弹能命中。实际情况是导弹失控导致脱靶。(2)目标机动,无瞄准误差大比例系数的导弹飞行轨迹比小比例系数的导弹飞行轨迹稍微超前。①在开始时,导弹指向瞬时遭遇点,因此制导加速度和视线角速度均为0。②在末段,N越大,导弹所需加速度和视线角速度也越大。③在遭遇点,制导加速度和视线角速度迅速降为0,因此和目标不作机动、有瞄准误差情况一样,导弹能命中目标。(结合ppt中的图片)11.两点法相对运动关系式12.追踪法、平行接近法、比例导引法的弹道特性分析10\n追踪法:导弹的绝对速度始终指向目标,相对速度总是落后于目标线,不管从哪个方向发射,导弹总是要绕到目标的后面去命中目标,这样导致导弹的弹道较弯曲(特别在命中点附近),需用法向过载较大,要求导弹要有很高的机动性。平行接近法:①直线弹道,当目标以不变航迹倾角作匀速直线运动,导弹作等速运动,则是一常数.即导弹轨迹是一条直线。当目标不作机动条件下,导弹初始前置角ΦM为,时,导弹将沿直线弹道与目标同时到达遭遇点,即导弹命中目标无须机动。②机动弹道,每一时刻对应一个瞬时遭遇点,瞬时遭遇点在空间的位置是不断变化的,导弹速度向量在每一时刻都指向瞬时遭遇点。比例导引法:可得到较为平直的弹道,满足收敛条件时,弹道前段比较弯曲,可充分利用导弹的机动能力,弹道后段较为平直,导弹具有较为富裕的机动能力。本质上对目标线的任何旋转,总是使弹向着减小dq/dt的方向运动,抑制目标线的旋转,使相对速度对准目标,力图使弹以直线弹道飞行网上找的答案是要结合图片公式分析的12.三点法、追踪法弹道图解三点导引遥控制导的特点:导弹、目标的运动参数都由制导站来测量。既要考虑导弹相对与目标的运动,还要考虑制导站运动对导弹运动的影响。三点导引包括重合法和变前置角法。重合法指导弹在向目标的飞行过程中,导弹、目标和制导站(地面制导站或载机)保持在一条直线上。优点:技术上容易实现。缺点:弹道比较弯曲,需用法向加速度大。应用:一般应用于攻击中、高空目标的地空、舰空导弹系统中。变前置角法是制导站-导弹视线超前制导站-目标视线一个角度,这一角度是随时间的变化而变化的,并在遭遇点为0。优点:弹道曲率较小,需用法向加速度较重合法小,对拦截机动目标有利。缺点:需测量的参数较重合法要多,制导设备复杂。应用:一般用在地空导弹中实现对低空高速目标拦击10\n追踪法分析(1)导弹咬着目标尾部追踪,只要导弹速度大于目标速度,则能击中目标。(2)当导弹从前部发射攻击目标,则飞行弹道在弹道末端导弹仍然从尾部进入。(3)对于正迎头攻击(q=PI),可以直接命目标,但导弹是不稳定的,一旦q偏离PI,则导弹仍然转入尾部追击,理论上在q=0时击中目标。纯追踪法特点优点:实现方法简单。缺点:弹道弯曲严重,只适宜从空中攻击地面或海上的慢速目标。三点法优点:技术上容易实现。缺点:弹道比较弯曲,需用法向加速度大。应用:一般应用于攻击中、高空目标的地空、舰空导弹系统中。14.工作波长、天线孔径、弹目距离与制导精度的关系制导精度在很大程度上取决于目标探测系统对目标的角分辨率。探测系统对目标的角分辨率越高,则制导精度越高。工作波长愈短、探测系统的孔径越大,弹目距离越近,则角分辨率越高。15.红外点源制导中调制的目的(1)使恒稳的光能转变成交变的光能(2)抑制背景干扰(空间滤波作用)(3)提供目标的方位和失调信息16.旋转调幅式调制盘的工作原理(响尾蛇9B)实物直径6.3mm,调制盘以每秒72转的转速转动,即包络信号频率为f=72Hz,载波频率为12×72=864Hz。包络角频率为2πf。1.当目标象点直径为一定值时,随着失调角的减小,调制深度下降,则有用信号u减小,调制曲线出现下降段。2.当有用信号u减小到接近系统噪声电平时,系统实际上已不再反映目标信号,调制盘中心不能反映目标信号的区域称为盲区。(对于中心为辐射状的旋转调制盘系统,必定存在盲区,盲区使位置误差增加,因此多用于对位置误差要求不高的系统)3.象点从中心向边缘移动时,失调角增大,调制深度越来越大,因而有用信号u加大,调制曲线出现一段线性上升段。10\n4.当失调角再增大,若目标象点直径大于环带宽度,则调制深度又将下降,有用信号值也降低,因为边缘环带宽度逐渐变窄,所以调制曲线呈现下降趋势,进入捕获区。5.曲线的峰值位置由象点直径与径向分格宽度的相对大小而定。实际上象点在跨越径向环带的分界处时,有用信号值将显著下降,因此实际在调制曲线的下降段还会有许多的狭窄凹陷区。6.当失调角Δq>Δqmax时像点越出调制盘的边缘,因而光敏电阻输出电压为0。17.结合“中心零”跟踪系统的静态增益曲线,解释中心为辐射状的旋转调制盘系统必定存在中心盲区和失控距离的原因“中心零”系统静态增益曲线如左图。对于中心为辐射状的旋转调制盘系统,必定存在盲区,因为处于中心处增益接近于零,此时有用信号接近系统的噪声电平,因此不再反映目标信息,盲区使位置误差增加,多用于对位置误差要求不高的系统波门跟踪算法原理。18.波门跟踪算法原理波门跟踪需要设计一个尺寸略大于目标图象的波门,在跟踪过程中,通过使波门套住目标图象,从而降低波门外背景和噪声干扰对目标的影响,减小需要处理的图象数据量。主要方法:矩心跟踪算法、边缘跟踪算法等。19.阈值法图像分割原理Otsu方法的基本思路是选取的最佳阈值应当使得用该阈值分割得到的两类间的分离性最好,类间分离性最好的判据是统计意义上的类间方差最大或类内方差最小。是一种具有客观评价标准的图象分割优化方法。20.相关跟踪算法原理相关跟踪是将系统的基准图像在实时图像上以不同的偏移值位移,然后根据一定的相似性度量准则对每一个偏移值下重叠的两个图像——基准图像及与基准图像同样大小的实时图像进行相关处理,根据判别准则和相关处理结果,判断目标在实时图像中的位置。相关跟踪主要包括归一化相关算法、特征序列匹配算法、序贯相似性检测算法(SSDA)、多子区灰度相关算法等。21.激光制导技术分类及应用(1.06um半主动)根据激光源所在位置,激光寻的制导可以分为主动和半主动两种。到目前为止,只有1.06um的激光半主动寻的制导方式得到了应用。命中率(90%)比常规武器高得多(25%)。自60年代以来,发展的激光半主动制导武器主要有3类:激光半主动制导航空炸弹、导弹(含火箭)和炮弹。22.雷达寻的制导系统分类根据目标能量的物理特性(电磁波、光波、红外、热信号、激光、电视信号)寻的制导可分为雷达寻的制导、红外寻的制导、电视寻的制导、激光寻的制导等。根据信号来源不同,寻的制导系统可分为主动、被动和半主动三种类型。10\n23.基于固定式导引头、活动式非跟踪导引头、活动式跟踪导引头的自动导引系统工作原理及追踪法、平行接近法、比例导引律的实现24.TVM制导体制的含义及特点TVM是英文TrackviaMissile的缩写,意即“经导弹跟踪”。优点:(1)可随时对导弹的飞行进行干预控制。(2)可选取较复杂的信号形式及相应的信号处理设备。(3)指令传输系统采用相位编码调制并采用扩频通信技术,弹上接收机采用相关接收技术,抑制干扰能力强。(4)保持了半主动制导的优点。缺点:(1)与主动式制导体制相比,TVM仍属半主动式。(2)目标信息下行通信系统较复杂,易受干扰。25.主动雷达导引头工作体制及特点主动式雷达导引头工作体制按信号的形式,可分为脉冲式、连续波式及脉冲多普勒式三种(1)脉冲主动式雷达导引头优点:测距;时分方式解决收发隔离。利用距离跟踪能提高对目标的鉴别能力,有效地克服一些杂波及多目标的干扰。没有速度分辨能力,抗固定地/海杂波能力较差,仅适用于对付大反射截面积、低速度军舰目标,多用于亚音速飞行的反舰导弹。(2)连续波主动式雷达导引头有速度分辨能力,但波形在时间上连续,收发隔离困难。(3)脉冲多普勒主动式雷达导引头时分方式解决收发隔离问题。具有距离/速度鉴别能力,有很强的杂波抑制能力,可以在较强的杂波背景中检测动目标回波。26.主动、半主动雷达导引头杂波谱构成及杂波形成原因杂波谱主要由主瓣杂波、副瓣杂波和高度线杂波组成。在低空下视时,杂波最为严重,常比导引头接收机的热噪声大70-90dB。主瓣杂波:天线接收到的杂波是不同反射点的反射信号的总和副瓣杂波:副瓣杂波不仅与干扰背景的特性有关,而且还与天线副瓣的形状及位置有关高度线杂波:天线副瓣与地面垂直照射时形成的杂波27.雷达导引头的多普勒测速原理28.遭遇段目标多普勒频率的计算及其在起爆控制中的应用。fd=2VRcosξ/λ(1)固定目标:fd=0(2)当目标相对雷达作切向运动:fd=0(3)目标相向雷达运动时fd为正,相背时为负。29.毫米波辐射计工作频率、亮度温差、天线波束宽度之间的关系较低的工作频率上温差ΔTc较大,从这点考虑,导引头的工作频率在频率低端有利。10\n大多数目标截获情况下,天线波束在地面的投影面积大大超过目标的投影面积,因而测量的温度对比度就为波束内背景所冲淡。若采用较高的工作频率,相同的天线孔径条件下,天线波束变窄,这种冲淡减少,但对比温度ΔTc下降。较低的工作频率上温差ΔTc较大,从这点考虑,导引头的工作频率在频率低端有利。»D30.低速流质量守恒方程、能量守恒方程、高速流的流量方程、升(阻)力计算公式的应用速流质量守恒方程:不可压缩气体,密度ρ可认为不变,则有。表示了不可压缩的低速流动气体的流速与截面积成反比关系。如过道风比开阔地带大就是这个原因。对于低速流(不可压缩流),伯努利方程:——动压头(单位体积内空气流动的动能);p——静压头。上式表明:不可压缩流定常流中,沿同一流线上(或同一流管各个截面处)气体的动压头和静压头之和为常量。低速流特征举例:1)纸片相吸:纸片间流速v增加,则纸片间压力下降,故纸片相互靠近。2)弹翼获得升力:机翼上翼面上凸,气体流过时流程长,流速v大,故静压相对于下翼面要小,弹翼获得升力。升力计算公式应用:为获得最佳效果,超音速飞行一般采用菱形或双弧形翼。弹体头部形状分钝形和尖形两种。钝形头部:在超音速下阻力很大,一段用于低亚音速和某些特殊要求的情况下,如红外、激光导引头。尖形头部:一般用于超音速情况下,最简单的尖形头部是圆锥形头部。此外,还有抛物线型、圆拱型和指数曲线形头部。高速流流量方程:应用举例:拉瓦尔喷管:当M=1时,dA/A=0,截面积达到临界值,可见,亚音速流加速到音速的截面,正是管道的“喉部”,该“喉部”叫临界截面。31.静矩概念与导弹的稳定性静距:导弹压力中心到重心之间的距离,可用于衡量导弹的稳定性:10\n正静距(压力中心处于重心之后)的导弹,在受到头部向上的扰动时将产生一个头部向下的力矩,反之亦然,即其具有恢复其原始位置的倾向。因此,正静距意味着导弹是静稳定的。零静距(压力中心与重心重合)的导弹将是中性稳定的。负静距(压力中心位于重心前面)的导弹则是静不稳定的。32.稳定性、操纵性、机动性之间的关系导弹的操纵性和稳定性是既对立又统一的。导弹的操纵性越好,导弹就越容易改变其原来的飞行状态;而导弹的稳定性越好,导弹就越不容易改变其原来的飞行状态,因此,提高导弹的操纵性,就会削弱导弹的稳定性;提高导弹的稳定性,就会削弱导弹的操纵性。另一方面,静稳定性差,则要求导弹的自动稳定系统产生操纵力矩,用以克服外加干扰,保持导弹的稳定。在这种情况下,如果导弹的操纵性好,导弹在自动稳定系统作用下,能够很快地改变其飞行状态,迅速达到稳定。这说明,提高导弹的操纵性有助于加强导弹的稳定性。导弹的机动性和操纵性既互相联系,又互相区别。因为操纵导弹作曲线飞行的过程,就是导弹机动的过程,有了好的操纵性,一定能获得高的机动性。但是,操纵性是表示操纵导弹的效率,即导弹运动参数的变化量和相应的操纵元件发生动作(如舵面偏转角)的变化量之比,是一个相对量;机动性是表示改变导弹飞行方向的能力,即导弹操纵元件发生最大动作(如舵面偏转到最大角度)时,导弹所能产生的法向加速度,它是一个绝对量。33.控制系统使导弹机动的方法控制力的来源,控制方法分为两类:空气动力控制、推力矢量控制。34.空气动力和推力矢量控制的特点及其应用空气动力控制:有翼导弹在大气层内飞行,主要靠空气动力产生控制力;推力矢量控制:无翼导弹大部时间在稀薄大气层或大气层外飞行,主要靠发动机推力来产生控制力。35.空气动力控制面分类及配置特点空气动力控制面分类:尾部控制面、头部控制面、活动翼。尾部控制面:位于导弹尾部的控制面如下图,假定导弹的前进速度是恒定的,导弹不发生横滚,并且只考虑水平面内的运动,因而重力的作用为零。假定弹体、翼和尾部控制面产生的法向力N都在中心位置,它的作用点过压心。由于控制面偏转了δ值,因而将产生一个法向控制力Nc,我们使Nc作用点距重心的距离为lc。10\n头部控制面:又称“鸭式”由于鸭子常常靠它的头部运动来控制自身,因而前控制面又称“鸭”式控制。导弹作为一个整体产生的侧向力同控制面偏转δ所产生的力同向,如果Lc/X*=10(仍同尾部控制情形一样),此时的总法向力为11Nc。因此,前控制面比尾控制面将更为有效。活动翼:对于无法使用尾控制结构和前控制结构的导弹(如中程寻的制导导弹:尾部和后半弹身为发动机,前部为导引头),必须采取活动翼进行空气动力控制。采取活动翼进行空气动力控制时,活动翼一般要用伺服机构驱动,并且在导弹的尾部有小型固定的稳定面。36.前控制面和尾控制面的效率分析第一幅图为尾部控制面,第二幅图为前控制面。由35题中尾部控制面和前控制面的分析介绍可以得到:前控制面比尾部控制面更有效。37.导弹的正常式布局与鸭式布局的特点正常式:弹翼在前,操纵面在后对十字型和×字型配置,典型的控制通道有三,即俯仰、偏航和滚转。鸭式:弹翼在后,操纵面在前弹翼前面的操纵面称为鸭翼。通常不能靠鸭翼差动实现滚转控制。解决办法有以下几种:a)在弹翼上安装陀螺副翼,限制导弹的滚转角速度。b)在弹翼上安装后缘副翼,可进行滚转操纵与稳定。10\nc)弹翼相对于弹身可转动。10