

- 76.45 KB
- 2022-07-30 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
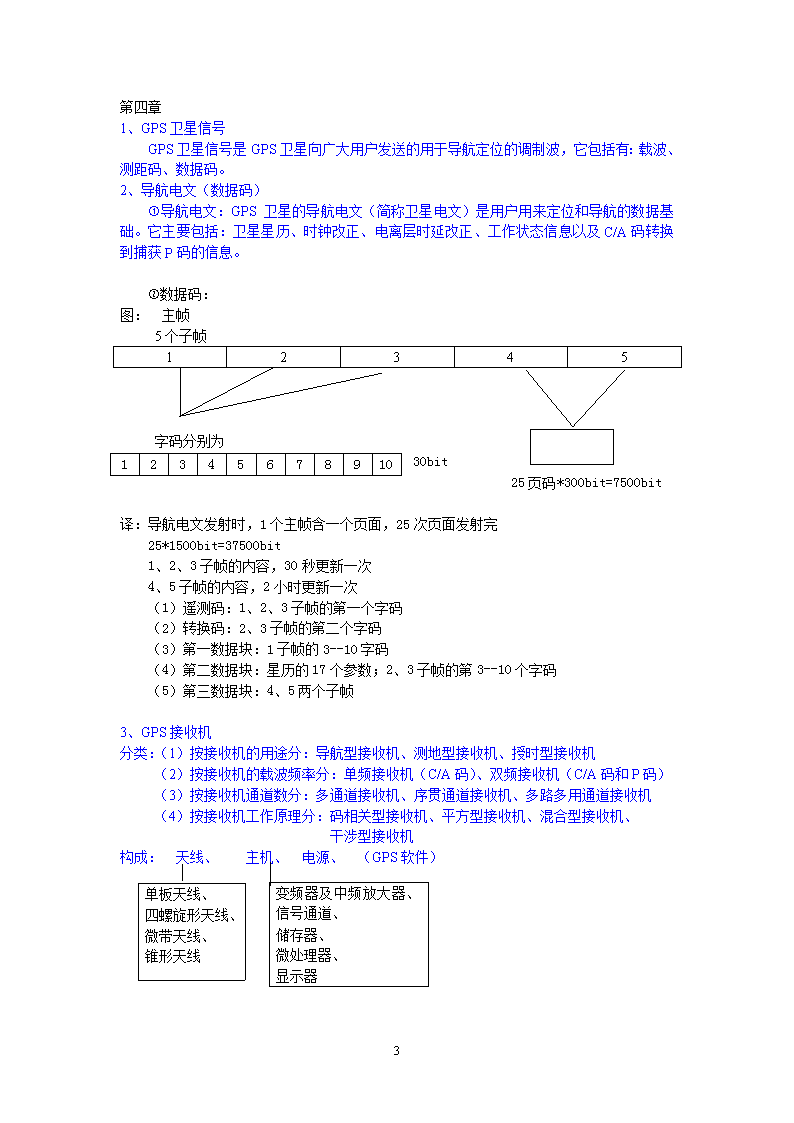
GPS08级复习资料第一章1、GPS系统组成空间部分----GPS卫星星座;地面控制部分----地面监控系统;用户设备部分----GPS信号接收机2、国际上著名的导航定位系统美国的GPS系统;俄罗斯的GLONASS;欧盟的伽利略(GALILEO)系统;中国的北斗二号卫星导航定位系统3、GPS定位系统的特点(用于导航,用于测绘)定位精度高、观测时间短、测站间无需通视、可提供三维坐标、操作简便、全天候作业、功能多应用广4、GPS用于各行业的应用现状与发展趋势(第十章)第二章1、GPS坐标系统(坐标系统的参数)根据坐标轴指向的不同分为两类坐标系,即天球坐标系和地球坐标系。天球坐标系(直角坐标系与其等效的球面坐标系参数间的关系)大地坐标系(直角坐标系与大地坐标系参数间的关系)2、GPS坐标系统的转换(三维坐标系统转换、布尔萨漠型、二维系统转换、四参数转换)3、时间系统(世界时、原子时、协调世界时、GPS时间系统)世界时UT:以平子夜为零时起算的格林尼治平太阳时定义为世界时UT;原子时ATI:以物质内部原子运动个特征为基础,秒长被定义为铯原子基态的两个超精细能级间跃迁辐射振荡9192631170周所持续的时间,原子时的起点取为1958年1月1日0时0秒。协调世界时UTC:采用原子时秒长,但因原子时比世界时每年快约1s,两者之差逐年积累,便采用条秒(闰秒)的方法使协调时与世界时的时刻相接近,其差不超过1s。6\nGPS时间系统:采用原子时ATI秒长作为时间基准,但时间起算的原点定义在1980年1月6日UTC0时。启动后不跳秒,保持时间的连续性。第三章1、卫星的无摄运动参数(32页):非中心引力下的卫星运动。卫星运动的轨道参数Ω----升交点的赤径,即在地球赤道平面上,升交点与春分点之间的地心夹角。i----轨道面的倾角,即卫星轨道平面与地球赤道面之间的夹角。----近地点角距,即在轨道平面上近地点A与升交点N之间的地心角距。二体(卫星和地球)问题的运动方程、为S(卫星)、O(地球质心)在万有引力作用下的加速度,根据牛顿第二定律,可得卫星与地球的运动方程:2、卫星的受摄运动(36页):中心引力下的卫星运动。3、GPS星历定义:卫星星历是描述卫星运动轨道的信息。是一组信息,共有17个参数,包括2个时间参数:、IODE;6个轨道参数:、、、、、9个摄动力改正参数:、、、、、、、、4、预报星历定义:预报星历又称广播星历,5、精密星历定义:6\n第四章1、GPS卫星信号GPS卫星信号是GPS卫星向广大用户发送的用于导航定位的调制波,它包括有:载波、测距码、数据码。2、导航电文(数据码)导航电文:GPS卫星的导航电文(简称卫星电文)是用户用来定位和导航的数据基础。它主要包括:卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转换到捕获P码的信息。数据码:图:主帧5个子帧12345字码分别为1234567891030bit25页码*300bit=7500bit译:导航电文发射时,1个主帧含一个页面,25次页面发射完25*1500bit=37500bit1、2、3子帧的内容,30秒更新一次4、5子帧的内容,2小时更新一次(1)遥测码:1、2、3子帧的第一个字码(2)转换码:2、3子帧的第二个字码(3)第一数据块:1子帧的3--10字码(4)第二数据块:星历的17个参数;2、3子帧的第3--10个字码(5)第三数据块:4、5两个子帧3、GPS接收机分类:(1)按接收机的用途分:导航型接收机、测地型接收机、授时型接收机(2)按接收机的载波频率分:单频接收机(C/A码)、双频接收机(C/A码和P码)(3)按接收机通道数分:多通道接收机、序贯通道接收机、多路多用通道接收机(4)按接收机工作原理分:码相关型接收机、平方型接收机、混合型接收机、干涉型接收机构成:天线、主机、电源、(GPS软件)单板天线、四螺旋形天线、微带天线、锥形天线变频器及中频放大器、信号通道、储存器、微处理器、显示器6\n第五章1、GPS定位的方式相对定位、绝对定位、静态定位、动态定位、(静态相对定位、动态相对定位、静态绝对定位、动态绝对定位)(名词解释)2、静态绝对定位原理(定位的方程、卫星空间、几何分布参数、PDOP)3、静态相对定位原理(定位的方程、方程的解法、整周未知数)4、求差的方法(一次差、二次差、三次差)5、动态定位原理、方法、差分定位的方法6、伪距测量7、相位载波测量第七章1、CPS误差来源(X:系统误差、O:偶然误差、)卫星部分(星历误差X、钟误差X、相对论误差X)信号传播(电离层、对流层、多路径效应O)用户部分(接收机钟误差O、对中整平误差(位置误差)O、天线相位中心变化O)其他误差(地球潮汐误差、地球自转X)2、电离层折射误差(50--1000m)定义:误差处理方法:1、利用双频观测2、利用电离层改正模型加以修正3、对流层折射误差:(<40km)定义:误差处理方法:1、采用对流层模型加以改正;2、引入描述对流层影响的附加代估参数,在数据处理中一并求得;3、利用同步观测求差;4、利用水汽辐射计直接测定信号传播的影响。4、多路径误差定义:误差处理方法:1、选择合适的站址;(测站远离大面积平静水面;测站不宜选择在山坡、山谷和盆地中;测站应离开高层建筑物)2、对接收机天线的要求。(在天线中设置抑径板;接收天线对于极化特性不同的反射信号应该有较强的抑制作用)5、星历误差定义:由星历所给出的卫星在空间的位置与实际位置之差。误差处理方法:1、建立自己的卫星跟踪网独立定轨;2、轨道松弛法;3、同步观测值求差。6、GPS天线相位中心的误差定义:6\n第八章1、GPS技术设计的依据1、GPS测量规范(规程)2、测量任务书2、GPS网的精度指标、密度指标、基准指标3、GPS网的基准设计位置基准(坐标)方向基准(角度)尺度基准(边长)4、GPS控制网的特征条件观测时段数计算公式:C为观测时段数;n为网点数;m为每点设站次数;N为接收机数在GPS中总基线数:必要基线数:独立基线数:多余基线数:5、设计方法点连式边连式网连式边点混合连式!!!6、GPS准备工作测区踏勘资料收集设备、器材筹备及人员组织拟定外业观测计划设计GPS网与地面网的联测方案GPS接收机选型及检验技术设计书编写GPS卫星可见性预报示例7、GPS测量的外业实施工作踏勘选点标志埋设观测工作数据处理6\n第九章1、GPS数据处理流程数据采集数据传输数据预处理基线解算GPS网平差2、GPS网平差包含的内容三维无约束平差三维约束平差二维无约束平差二维约束平差3、GPS坐标转换利用已知重合点的三维直角坐标进行坐标转换三维大地坐标二维高斯平面坐标二维大地坐标4、GPS高程大地高=正常高+高程异常6