

- 364.50 KB
- 2021-05-14 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
连接体平衡问题(1)
班级__________ 座号_____ 姓名__________ 分数__________
一、知识清单
1. 平衡问题中的整体法和隔离法:
(1)整体法:解决物体的平衡问题时,应先对物体进行受力分析,当分析相互作用的两个或两个以上物体的受力情况及分析外力对系统的作用时,或者当系统内各物体具有相同大小的加速度或相同的运动状态且不需要考虑系统内物体间的相互作用力时,宜用整体法;
(2)隔离法:而在分析系统内各物体(或一个物体各部分)间的相互作用时或者当系统内各部分的加速度大小、运动状态不同时常用隔离法。运用隔离法选择研究对象分析物体受力时,应按照由易到难的原则。
整体法和隔离法不是独立的,对一些较复杂问题,通常需要多次选取研究对象,交替使用整体法和隔离法。
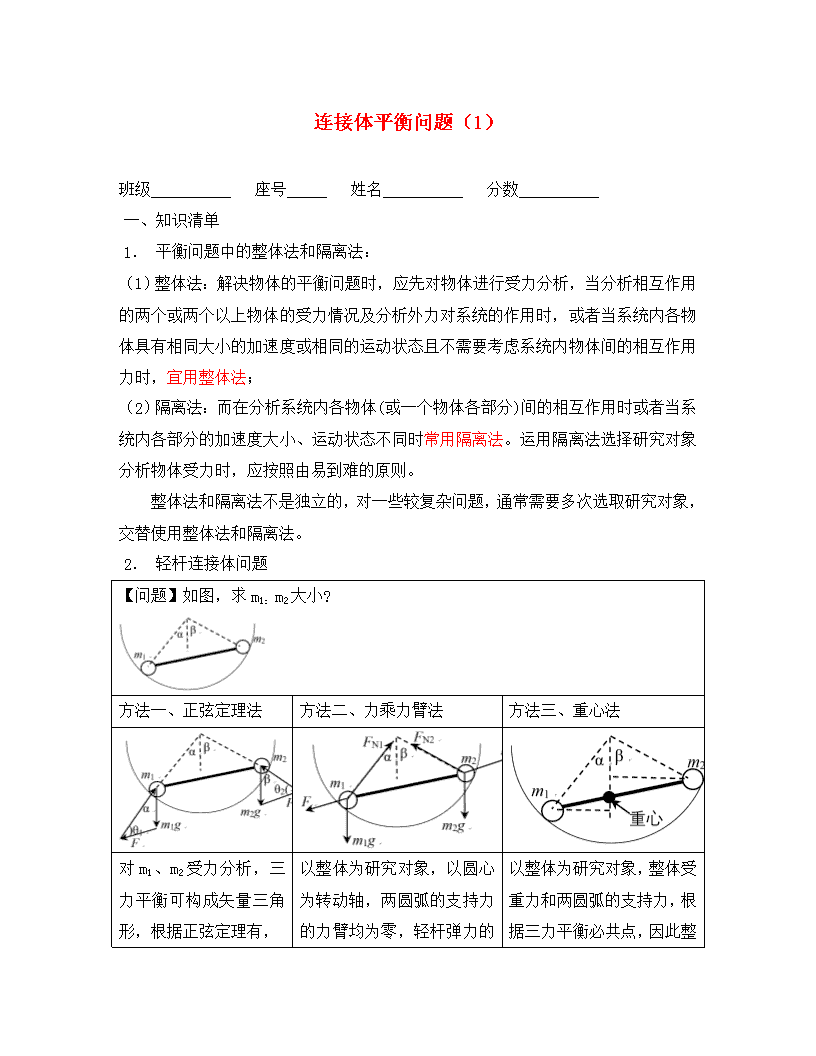
2. 轻杆连接体问题
【问题】如图,求m1:m2大小?
方法一、正弦定理法
方法二、力乘力臂法
方法三、重心法
对m1、m2受力分析,三力平衡可构成矢量三角形,根据正弦定理有,
对m1:
对m2:
根据等腰三角形有:θ1=θ2
联立解得m1gsinα=m2gsinβ
∴m1:m2=sinβ:sinα
以整体为研究对象,以圆心为转动轴,两圆弧的支持力的力臂均为零,轻杆弹力的力臂相等,力乘以力臂等值反向。根据转动平衡知:动力乘以动力臂等于阻力乘以阻力臂,即m1g·Rsinα=m2g·Rsinβ。
∴m1:m2=sinβ:sinα
以整体为研究对象,整体受重力和两圆弧的支持力,根据三力平衡必共点,因此整体的重心必过圆心正下方。所以有m1·Rsinθ1=m2·Rsinθ2,∴m1:m2=sinβ:sinα
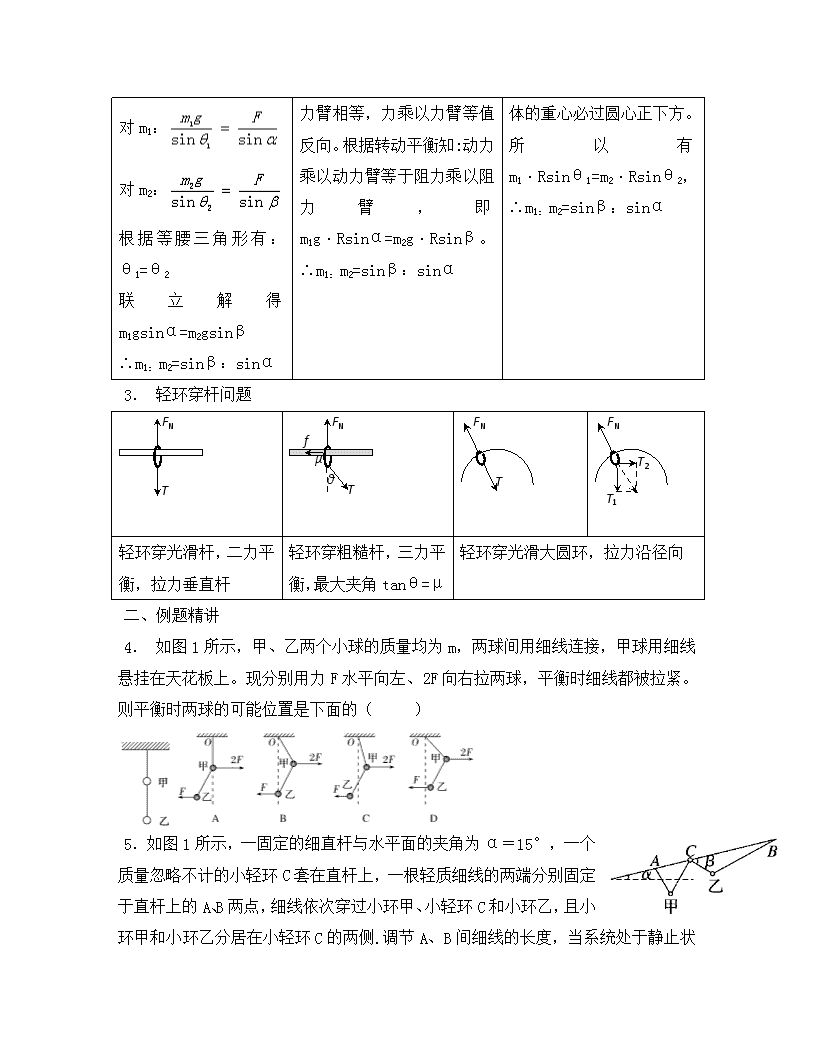
3. 轻环穿杆问题
FN
T
FN
T
θ
f
μ
FN
T
FN
T1
T2
轻环穿光滑杆,二力平衡,拉力垂直杆
轻环穿粗糙杆,三力平衡,最大夹角tanθ=μ
轻环穿光滑大圆环,拉力沿径向
二、例题精讲
4. 如图1所示,甲、乙两个小球的质量均为m,两球间用细线连接,甲球用细线悬挂在天花板上。现分别用力F水平向左、2F向右拉两球,平衡时细线都被拉紧。则平衡时两球的可能位置是下面的( )
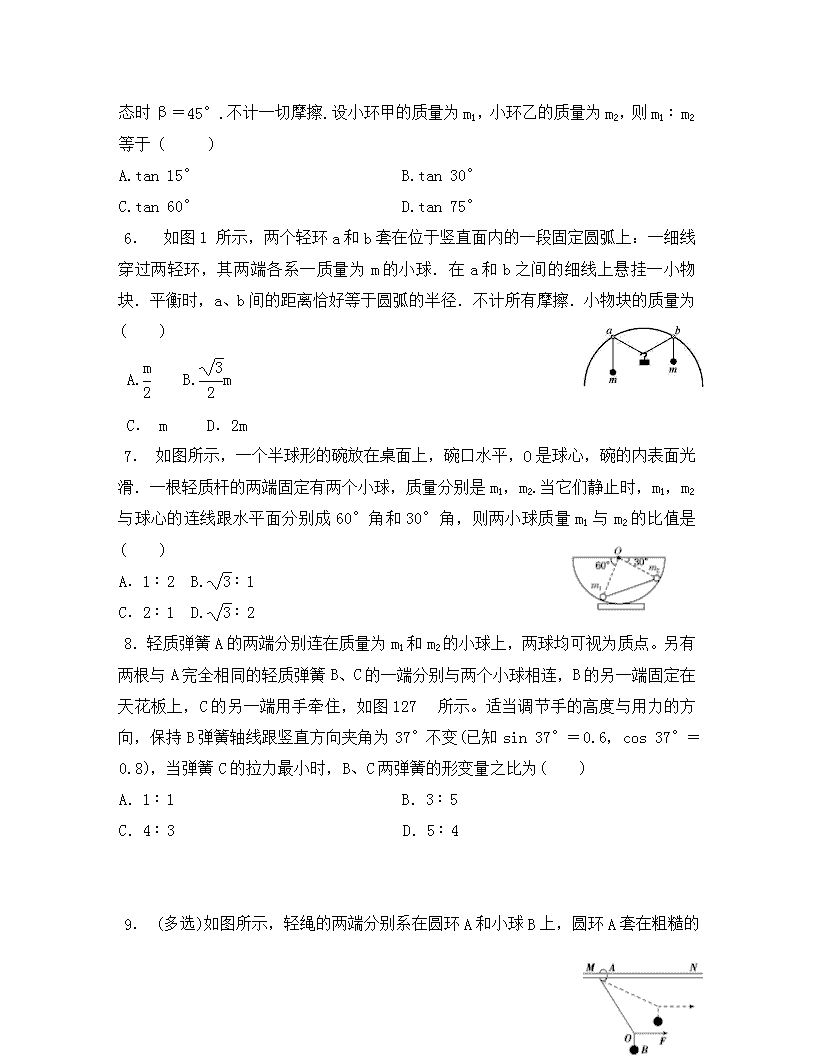
5.
如图1所示,一固定的细直杆与水平面的夹角为α=15°,一个质量忽略不计的小轻环C套在直杆上,一根轻质细线的两端分别固定于直杆上的A、B两点,细线依次穿过小环甲、小轻环C和小环乙,且小环甲和小环乙分居在小轻环C的两侧.调节A、B间细线的长度,当系统处于静止状态时β=45°.不计一切摩擦.设小环甲的质量为m1,小环乙的质量为m2,则m1∶m2等于( )
A.tan 15° B.tan 30°
C.tan 60° D.tan 75°
6. 如图1所示,两个轻环a和b套在位于竖直面内的一段固定圆弧上:一细线穿过两轻环,其两端各系一质量为m的小球.在a和b之间的细线上悬挂一小物块.平衡时,a、b间的距离恰好等于圆弧的半径.不计所有摩擦.小物块的质量为( )
A. B.m
C. m D.2m
7. 如图所示,一个半球形的碗放在桌面上,碗口水平,O是球心,碗的内表面光滑.一根轻质杆的两端固定有两个小球,质量分别是m1,m2.当它们静止时,m1,m2与球心的连线跟水平面分别成60°角和30°角,则两小球质量m1与m2的比值是( )
A.1∶2 B.∶1
C.2∶1 D.∶2
8.轻质弹簧A的两端分别连在质量为m1和m2的小球上,两球均可视为质点。另有两根与A完全相同的轻质弹簧B、C的一端分别与两个小球相连,B的另一端固定在天花板上,C的另一端用手牵住,如图127所示。适当调节手的高度与用力的方向,保持B弹簧轴线跟竖直方向夹角为37°不变(已知sin 37°=0.6,cos 37°=0.8),当弹簧C的拉力最小时,B、C两弹簧的形变量之比为( )
A.1∶1 B.3∶5
C.4∶3 D.5∶4
9.
(多选)如图所示,轻绳的两端分别系在圆环A和小球B上,圆环A套在粗糙的水平直杆MN上.现用水平力F拉着绳子上的一点O,使小球B从图中实线位置缓慢上升到虚线位置,但圆环A始终保持在原位置不动.在这一过程中,环对杆的摩擦力Ff和环对杆的压力FN的变化情况是( )
A.Ff不变 B.Ff增大
C.FN减小 D.FN不变
三、自我检测
10.(多选)如图5所示,一根轻质细绳跨过定滑轮连接两个小球A、B,它们都穿在一根光滑的竖直杆上,不计细绳与滑轮之间的摩擦,当两球平衡时OA绳与水平方向的夹角为60°,OB绳与水平方向的夹角为30°,则球A、B的质量之比和杆对A、B的弹力之比分别为( )
图5
A.= B.=
C.= D.=
11.
如图所示,物块A和滑环B用绕过光滑定滑轮的不可伸长的轻绳连接,滑环B套在与竖直方向成θ=37°的粗细均匀的固定杆上,连接滑环B的绳与杆垂直并在同一竖直平面内,滑环B恰好不能下滑,滑环和杆间的动摩擦因数μ=0.4,设滑环和杆间的最大静摩擦力等于滑动摩擦力,则物块A和滑环B的质量之比为( )
A. B.
C. D.
12.如图所示,一轻杆两端分别固定着质量为mA和mB的两个小球A和B(可视为质点).将其放在一个直角形光滑槽中,已知轻杆与槽右壁成α角,槽右壁与水平地面成θ角时,两球刚好能平衡,且α≠θ,则A、B两小球质量之比( )
A. B. C. D.
13.如图所示,两个质量为m1的小球套在竖直放置的光滑支架上,支架的夹角为120°,用轻绳将两球与质量为m2的小球连接,绳与杆构成一个菱形,则m1∶m2为( )
A.1∶1
B.1∶2
C.1∶
D.∶2
b
a
B
A
14.两个相同的小环套在水平直杆AB上,两根等长的细线与两环相连,两线的另一端系一重球,平衡时位置如图示,现将a环向左移一小段距离,b环不动,两环再次达到平衡时,那么将移动后的平衡状态与原来的平衡状态比较,直杆对a支持力N,摩擦力f和细线中的张力T的变化情况是( )
A.N不变,f不变,T不变
B.N变大,f变大,T变大
C.N不变,f变大,T变大
D.N变小,f变大,T变小
15.水平放置夹角为60°的光滑V型支架AOB,两臂上各套有一个轻环P、Q,用不可伸长的细线连接两环,如图,现用力F沿∠AOB的平分线作用于细线中点,待两环受力达到平衡时,拉力F与线中拉力T的大小之比为( )
A. B.
C.1:1 D.2:1
16.(多选)如图所示,在光滑的水平杆上穿两个重力均为2 N的球A、B,在两球之间夹一弹簧,弹簧的劲度系数为10 N/m,用两条等长的线将球C与A、B相连,此时弹簧被压短了10 cm,两条线的夹角为60°,则( )
A.杆对A球的支持力的大小为2N
B.杆对A球的支持力的大小为(2+) N
C.C球的重力大小为2 N
D.连接球C与球A间细线的拉力为2 N
17.如图所示,人重为G1=500N,平台重为300N,人用绳子通过滑轮装置拉住平台,滑轮的重量及摩擦均不计,人与平台均处于静止状态。则人对绳子的拉力T及人对平台的压力N的大小分别为( )
A.200N 100N
B.200N 200N
C.400N 100N
D.400N 200N