

- 1.62 MB
- 2021-05-22 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
第 9 讲 机械能守恒定律及能量守恒定律的
综合应用
[考试要求和考情分析]
历次选考统计
命题角
度考试内容 选考要求
2016/04 2016/10 2017/04 2017/11 2018/04 2018/11
追寻守恒量
——能量
b
重力势能 c 4 12 13 5
弹性势能 b 20 5
机械能守恒
定律
d 20
能量守恒定
律与能源
d 12 22 22 13 20
单 体 与
系 统 的
机 械 能
守恒、功
能关系、
能 量 与
物 体 的
多 过 程
问题
对重力势能、弹性势能的理解
[要点总结]
1.对重力做功和重力势能的提醒
(1)重力做功的大小与物体的运动状态无关,与物体是否受其他力无关;
(2)重力做功,一定会引起重力势能的变化;
(3)重力势能是标量,但有正负,其意义表示物体的重力势能比它在参考平面的重
力势能大还是小。
2.重力势能的求解方法
(1)定义法:选取参考平面,确定物体相对参考平面的高度 h,代入 Ep=mgh 求解
重力势能。
(2)WG 和 Ep 关系法:由 WG=Ep1-Ep2 知 Ep2=Ep1-WG 或 Ep1=WG+Ep2。
[精典题组]
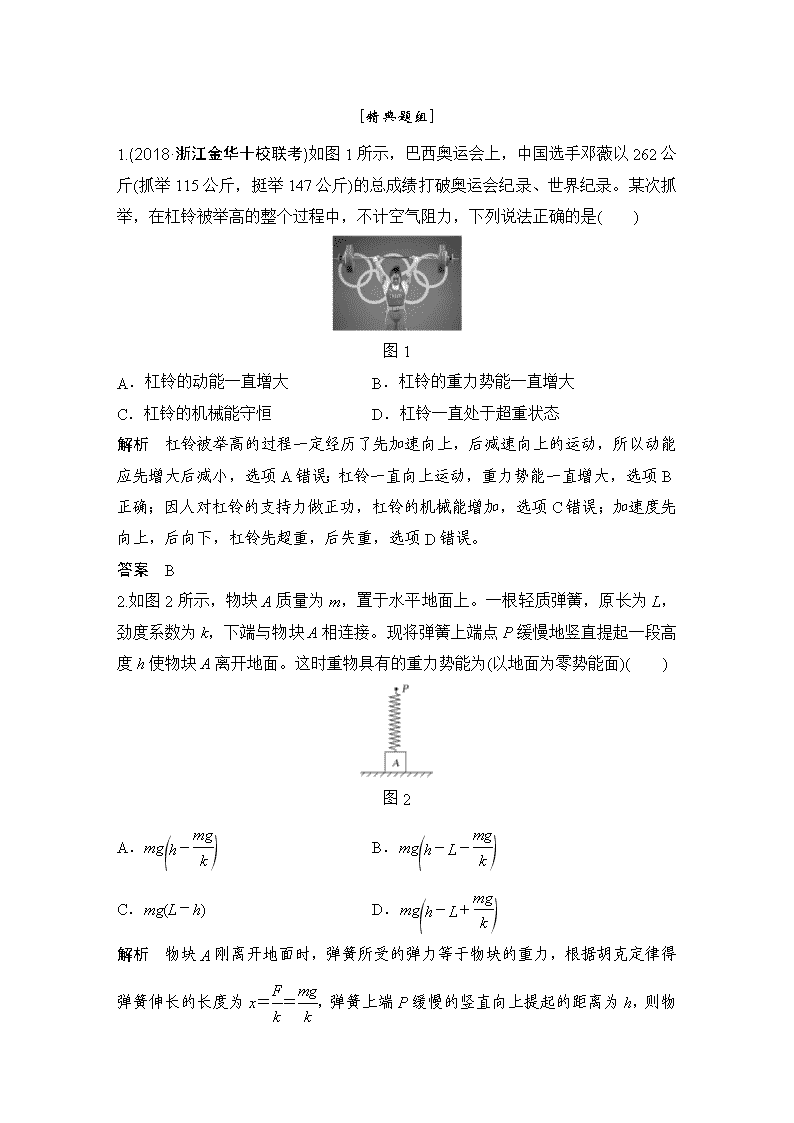
1.(2018·浙江金华十校联考)如图 1 所示,巴西奥运会上,中国选手邓薇以 262 公
斤(抓举 115 公斤,挺举 147 公斤)的总成绩打破奥运会纪录、世界纪录。某次抓
举,在杠铃被举高的整个过程中,不计空气阻力,下列说法正确的是( )
图 1
A.杠铃的动能一直增大 B.杠铃的重力势能一直增大
C.杠铃的机械能守恒 D.杠铃一直处于超重状态
解析 杠铃被举高的过程一定经历了先加速向上,后减速向上的运动,所以动能
应先增大后减小,选项 A 错误;杠铃一直向上运动,重力势能一直增大,选项 B
正确;因人对杠铃的支持力做正功,杠铃的机械能增加,选项 C 错误;加速度先
向上,后向下,杠铃先超重,后失重,选项 D 错误。
答案 B
2.如图 2 所示,物块 A 质量为 m,置于水平地面上。一根轻质弹簧,原长为 L,
劲度系数为 k,下端与物块 A 相连接。现将弹簧上端点 P 缓慢地竖直提起一段高
度 h 使物块 A 离开地面。这时重物具有的重力势能为(以地面为零势能面)( )
图 2
A.mg(h-mg
k ) B.mg(h-L-mg
k )
C.mg(L-h) D.mg(h-L+mg
k )
解析 物块 A 刚离开地面时,弹簧所受的弹力等于物块的重力,根据胡克定律得
弹簧伸长的长度为 x=F
k
=mg
k
,弹簧上端 P 缓慢的竖直向上提起的距离为 h,则物
块上升的高度为 H=h-x,以地面为势能零点,这时物块 A 具有的重力势能为 Ep=
mgH=mg(h-mg
k ),选项 A 正确,B、C、D 错误。
答案 A
机械能守恒定律及其应用
[要点总结]
1.机械能守恒的判定方法
(1)做功判断法:若物体系统内只有重力或弹簧弹力做功,其他力均不做功或其他
力做功的代数和为零,则系统的机械能守恒。
(2)能量转化判断法:若只有系统内物体间动能和重力势能及弹性势能的相互转化,
系统跟外界没有发生机械能的传递,机械能也没有转变成其他形式的能(如没有内
能增加),则系统的机械能守恒。
2.机械能守恒定律的表达式
[典例分析]
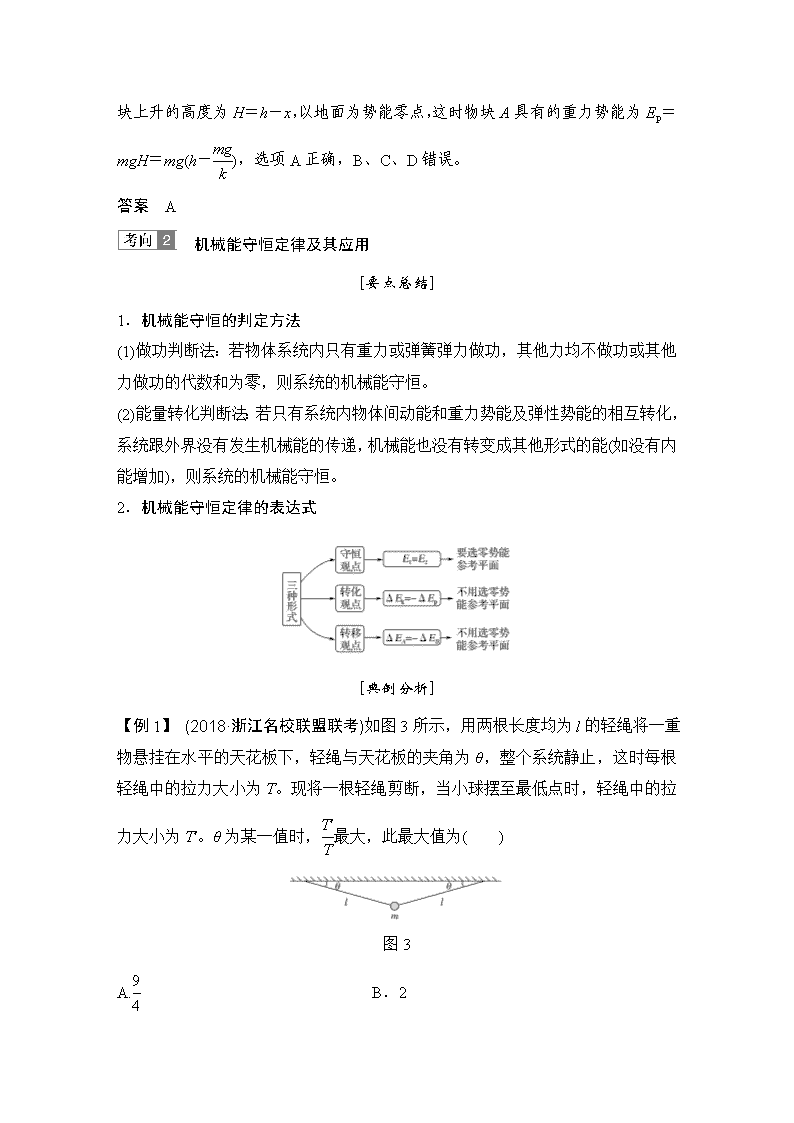
【例 1】 (2018·浙江名校联盟联考)如图 3 所示,用两根长度均为 l 的轻绳将一重
物悬挂在水平的天花板下,轻绳与天花板的夹角为 θ,整个系统静止,这时每根
轻绳中的拉力大小为 T。现将一根轻绳剪断,当小球摆至最低点时,轻绳中的拉
力大小为 T′。θ 为某一值时,T′
T
最大,此最大值为( )
图 3
A.9
4 B.2
C. 3 2-2 D.54
25
解析 剪断细线之前有 2Tsin θ=mg;剪断细线后,摆到最低点时 1
2mv2=mgl(1-
sin θ),由牛顿第二定律有 T′-mg=mv2
l
,联立解得T′
T
=6sin θ-4sin2 θ,由数学知
识可知,此比值的最大值为9
4
,选项 A 正确。
答案 A
[精典题组]
3.(2018·浙江嘉兴一模)如图 4 是一种名为“牙签弩”的玩具弓弩,现竖直向上发
射木质牙签,O 点为皮筋自然长度位置,A 为发射的起点位置。若不计一切阻力,
则( )
图 4
A.A 到 O 的过程中,牙签一直处于超重状态
B.A 到 O 的过程中,牙签的机械能守恒
C.在上升过程中,弓和皮筋的弹性势能转化为牙签的动能
D.根据牙签向上飞行的高度可测算出牙签被射出时的速度
解析 从 A 到 O 的过程中,牙签受重力和弹力,当弹力大于重力时是加速上升,
处于超重状态;当弹力小于重力时,减速上升,是失重状态,选项 A 错误;A 到
O 的过程中,牙签的动能和势能均增加,故机械能增加,选项 B 错误;在上升过
程中,系统机械能守恒,弓和皮筋的弹性势能逐渐转化为牙签的动能和重力势能,
选项 C 错误;由于不计一切阻力,牙签向上飞行过程是竖直上抛运动,根据运动
学公式 v2=2gh 可知,根据牙签向上飞行的高度可测算出牙签被射出时的速度,
选项 D 正确。
答案 D
4.(2018·浙江瑞安选考模拟)总质量约为 3.8 吨“嫦娥三号”探测器在距月面 3 m
处关闭反推发动机,让其以自由落体方式降落在月球表面。4 条着陆腿触月信号
显示,“嫦娥三号”完美着陆月球虹湾地区。月球表面附近重力加速度约为 1.6
m/s2,4 条着陆腿可视作完全相同的四个轻弹簧,在软着陆后,每个轻弹簧获得
的弹性势能大约是( )
图 5
A.28 500 J B.4 560 J
C.18 240 J D.9 120 J
解析 由机械能守恒定律 mgh=4Ep,解得 Ep=mgh
4
=4 560 J,选项 B 正确。
答案 B
5.(2018·浙江宁波适应性考试)宁波高中科技新苗项目的同学在一个连锁机关游
戏中,设计了一个如图 6 所示的起始触发装置:AB 段是长度连续可调的竖直伸缩
杆,BCD 段是半径为 R 的四分之三圆弧弯杆,DE 段是长度为 2R 的水平杆,与 AB
杆稍稍错开。竖直杆外套有下端固定且劲度系数较大的轻质弹簧,在弹簧上端放
置质量为 m 的套环。每次将弹簧的长度压缩至 P 点后锁定,设 PB 的高度差为 h,
解除锁定后弹簧可将套环弹出,在触发器的右侧有多米诺骨牌,多米诺骨牌的左
侧最高点 Q 和 P 点等高,且与 E 的水平距离为 x(可以调节),已知弹簧锁定时的
弹性势能 Ep=10mgR,套环 P 与水平杆 DE 段的动摩擦因数 μ=0.5,与其他部分
的摩擦可以忽略不计,不计套环受到的空气阻力及解除锁定时的弹性势能损失,
不考虑伸缩竖直杆粗细变化对套环的影响,重力加速度为 g。求:
图 6
(1)当 h=7R 时,套环到达杆的最高点 C 处时的速度大小;
(2)在(1)问中套环运动到最高点 C 时对杆作用力的大小和方向;
(3)若 h 在 3R 至 10R 连续可调,要使该套环恰能击中 Q 点,则 x 应该在哪个范围
内调节?
解析 (1)当 h=7R 时,套环从 P 点运动到 C 点,根据机械能守恒定律有 Ep=mg(h
+R)+1
2mv2
Ep=10mgR,解得 v= 4gR=2 gR。
(2) 在最高点 C 时,对套环,根据牛顿第二定律有
mg+FC=mv2
R
解得 FC=3mg,由牛顿第三定律,套环对杆的作用力为 3mg,方向向上。
(3) 套环恰能击中 Q 点,环由 E 到 Q 做平抛运动
h-R=1
2gt2
x=vEt
从 P 到 E,根据能量守恒定律有
Ep=mg(h-R)+μmg·2R+1
2mv2E
由以上各式可解得 0≤x≤2 14R。
答案 (1)2 gR (2)3mg 竖直向上
(3)0≤x≤2 14R
6.(2018·浙江诸暨选考模拟)如图 7 所示,两个半径为 R 的四分之一圆弧构成的
光滑细管道 ABC 竖直放置,且固定在光滑水平面上,圆心连线 O1O2 水平。轻弹
簧左端固定在竖直挡板上,右端与质量为 m 的小球接触(不拴接,小球的直径略
小于管的内径),长为 R 的薄板 DE 置于水平面上,板的左端 D 到管道右端 C 的
水平距离为 R。开始时弹簧处于锁定状态,具有的弹性势能为 3mgR,其中 g 为重
力加速度。解除锁定,小球离开弹簧后进入管道,最后从 C 点抛出。
图 7
(1)求小球经 C 点时的动能;
(2)求小球经 C 点时所受的弹力;
(3)弹簧锁定时弹簧的弹性势能 Ep 满足什么条件,从 C 点抛出的小球才能击中薄
板 DE?
解析 (1)解除锁定后,小球运动到 C 点的过程,弹簧和小球组成的系统机械能守
恒
由机械能守恒定律得
3mgR=2mgR+Ek
解得 Ek=mgR。
(2)小球过 C 点时的动能 Ek=1
2mv2
设小球经过 C 点时轨道对小球的作用力为 F
由牛顿第二定律得
mg+F=mv2
R
解得 F=mg,方向竖直向下。
(3)小球离开 C 点后做平抛运动
竖直方向:2R=1
2gt2
水平方向:x1=v1t
若要小球击中薄板,应满足 R≤x1≤2R
弹簧的弹性势能 Ep=2mgR+1
2mv21
所以 Ep 满足 17
8 mgR≤Ep≤5
2mgR 时,小球才能击中薄板。
答案 (1)mgR (2)mg 方向竖直向下
(3)17
8 mgR≤Ep≤5
2mgR
功能关系、能量守恒定律与能源
[要点总结]
1.功能关系的应用技巧
运用功能关系解题时,应弄清楚重力或弹力做什么功,合外力做什么功,除重力、
弹力外的力做什么功,从而判断重力势能或弹性势能、动能、机械能的变化。
2.运用能量守恒定律解题的基本思路
(1)确定初、末态。
(2)分析状态变化过程中哪种形式的能量减少,哪种形式的能量增加。
(3)能量的减少量与能量的增加量一定相等,即 ΔE 减=ΔE 增。
[典例分析]
【例 2】 (2018·浙江台州高三期末)如图 8 所示为一自由式滑雪空中技巧比赛场
地示意图,比赛场地由出发区 AB、助滑坡 BC、第一过渡区 CD、跳台 DE、第二
过渡区 EF、着陆坡 FG 和终点区 GH 组成,在 H 处安置半径为 R=2.0 m 的圆形
轨道,出口靠近但相互错开。第一过渡区和终点区的最低点在同一水平地面上,
出发区距地面的高度 hB=8.4 m,跳台最高点 E 和着陆坡最高点 F 离地面的高度
均为 h0=4.0 m,着陆坡坡度为 37°。运动员从助滑坡顶端 B 由静止滑下,离开跳
台在空中完成预定动作后到达 F 点正上方以水平速度 v=4.0 m/s 飞出,在落到倾
斜雪道 FG 上时,运动员靠改变姿势进行缓冲使自己只保留沿斜面方向的分速度
而不弹起。假设运动员连同滑雪板的总质量 m=100 kg,除缓冲外运动员可视为
质点,滑雪板与雪道 GH 间的动摩擦因数 μ=0.2,不计其余滑道和空气的阻力,sin
37°=0.6,cos 37°=0.8,取 g=10 m/s2,求:
图 8
(1)运动员到达 F 点正上方时离地面的高度 h;
(2)运动员在倾斜雪道 FG 上滑行的距离;
(3)若运动员能够不脱离圆形轨道顺利通过最高点,雪道 GH 的最大长度。
解析 (1)运动员连同滑雪板从 B 点运动到 F 点正上方过程,
根据机械能守恒定律得 mghB=mgh+1
2mv2
代入数据解得 h=hB-v2
2g
=7.6 m
(2)设运动员落在倾斜雪道 K 点,离地高度为 h1
根据平抛运动规律得 h-h1=1
2gt2
位移关系为h0-h1
tan 37°
=vt
代入数据后解得 h1=0.4 m 或 5.8 m (不合题意)
运动员在倾斜雪道 FG 上滑行的距离 KG= h1
sin 37°
≈0.67 m。
(3)运动员落在倾斜雪道 K 点保留沿斜面方向的速度
vK=vcos 37°+vysin 37°
竖直方向有 v2y=2g(h-h1)
代入数据后解得 vK=10.4 m/s
当运动员恰好不脱离圆形轨道通过最高点时 mg=mv
R
从 K 点运动到 M 点过程,根据动能定理得
mgh1-μmgl-2mgR=1
2mv 2M-1
2mv2K
代入数据后解得 l=4.04 m
运动员不脱离圆形轨道顺利通过最高点,雪道 GH 的最大长度为 4.04 m。
答案 (1)7.6 m (2)0.67 m (3)4.04 m
[精典题组]
7.(2018·浙江瑞安选考模拟)如图 9 所示,某一兴趣小组对遥控汽车的性能进行
研究,遥控汽车从斜面上 A 点由静止出发,遥控汽车的功率恒为 7 W,到达 C 点
后关闭电源,在 B 点没有动能损失,水平面 BC 在 C 点与光滑半圆轨道 CD 平滑
连接,遥控汽车刚好能通过最高点 D。遥控汽车的质量为 m=0.2 kg,汽车与 AB、
BC 面的动摩擦因数均为 μ=0.25,AB 的长度为 L=5 m,AB 的倾角为 37°,BC 的
长度为 s=8 m,CD 为半圆轨道的直径,CD 的长度为 d=3.2 m,不计空气阻力(sin
37°=0.6,cos 37°=0.8,g=10 m/s2)。求:
图 9
(1)小车离开 D 点后的水平位移大小;
(2)经过 C 点时对圆形轨道的压力是多大?
(3)从 A 点出发运动到 C 点经历了多长时间?
解析 (1)根据牛顿第二定律,在 D 点满足 mg=mv
R
又 R=d
2
,则 vD= gd
2
=4 m/s
离开 D 点后做平抛运动,则竖直方向有 d=1
2gt2
水平方向位移 x=vDt
得 x=3.2 m。
(2)从 C 点到 D 点的过程中机械能守恒,则有
-mgd=1
2mv2D-1
2mv2C
在 C 点有 FN-mg=mv
R
,得 FN=12 N
由牛顿第三定律可知 F 压=FN=12 N。
(3)从 A 到 C 的过程由功能关系可得
Pt+mgLsin 37°-μmgLcos 37°-μmgs=1
2mv2C
解得 t=8
7 s。
答案 (1)3.2 m (2)12 N (3)8
7 s
8.(2018·浙江苍南中学高二质检)如图 10 所示,在某电视台举办的冲关游戏中,
AB 是处于竖直平面内的光滑圆弧轨道,半径 R=1.6 m,BC 是长度为 L1=3 m 的
水平传送带,CD 是长度为 L2=3.6 m 水平粗糙轨道,AB、CD 轨道与传送带平滑
连接,参赛者抱紧滑板从 A 处由静止下滑,参赛者和滑板可视为质点,参赛者质
量 m=60 kg,滑板质量可忽略。已知滑板与传送带、水平轨道的动摩擦因数分别
为 μ1=0.4、μ2=0.5,g 取 10 m/s2。求:
图 10
(1)参赛者运动到圆弧轨道 B 处对轨道的压力;
(2)若参赛者恰好能运动至 D 点,求传送带运转速率及方向;
(3)在第(2)问中,传送带由于传送参赛者多消耗的电能。
解析 (1) 对参赛者 A 到 B 过程,由动能定理
mgR(1-cos 60°)=1
2mv2B
解得 vB=4 m/s
在 B 处,由牛顿第二定律 NB-mg=m v
R
解得 NB=2mg=1 200 N
根据牛顿第三定律,参赛者对轨道的压力 N′B=NB=1 200 N,方向竖直向下。
(2) C 到 D 过程,由动能定理-μ2mgL2=0-1
2mv2C
解得 vC=6 m/s
B 到 C 过程,由牛顿第二定律 μ1mg=ma
解得 a=4 m/s2
参赛者加速至 vC 历时 t=vC-vB
a
=0.5 s
位移 x1=vB+vC
2 t=2.5 mmgsin θ,故 F 的方向与 OA 不再垂直,
有两种可能的方向,F 与物体的运动方向的夹角可能大于 90°,也可能小于 90°,
即拉力 F 可能做负功,也可能做正功,重力做功不影响机械能的变化,故根据功
能原理,物体机械能变化量等于力 F 做的功,即机械能可能增加,也可能减小,
故 A 错误,C 正确。
答案 BC
二、非选择题
10.(2018·浙江诸暨高二期中)如图 8 为特种兵过山谷的简化示意图。将一根不可伸
长的细绳两端固定在相距 d 为 20 m 的 A、B 两等高点,∠APB=α=53°。绳上挂
一小滑轮 P,战士们相互配合,沿着绳子滑到对面。如图所示,战士甲(图中未画
出)水平拉住滑轮,质量为 50 kg 的战士乙吊在滑轮上,脚离地,处于静止状态,
此时 AP 竖直。然后战士甲将滑轮释放。若不计滑轮摩擦及空气阻力,也不计绳
与滑轮的质量(重力加速度 g 取 10 m/s2,sin 53°=0.8,cos 53°=0.6)。求:
图 8
(1)战士甲释放滑轮前对滑轮的水平拉力 F;
(2)假如 B 靠近 A,绳长不变,F 将如何变化?简述理由。
(3)不改变 d 情况下将滑轮释放,战士乙运动过程中的最大速度大小。
解析 (1)战士乙静止时,对滑轮受力分析如图所示。
根据共点力平衡条件得 T1sin 53°=F
T1cos 53°+T2=G
又 T1=T2
联立解得 F=250 N。
(2)战士乙从 A 到 B 运动过程,力的变化情况如图所示。
AB 间距缩短,绳长不变,∠APB=α 变小,由(1)得 F=T1sin α= Gsin α
cos α+1
,因 sin α
变小,cos α 变大,得 F 变小。
(3)根据机械能守恒定律可知,运动到最低处时重力势能最小,动能最大,即有最
大速度,AP=15 m,BP=25 m,所以 AP′=BP′=20 m,ΔABP′是正三角形,P′在
AB 水平线下方 10 3 m,以 P′点所在的水平面为零势能面,则
hP=(10 3-15) m
根据机械能守恒定律有 mghP+0=0+1
2mv2
解得 v= 2ghP= 2 × 10 × (10 3-15) m/s
所以最大速度大小为 v=6.81 m/s。
答案 (1)250 N (2)F 变小 见解析 (3)6.81 m/s
11.(2018·浙江金华十校高三期末)如图 9 所示,质量 m=0.2 kg 小物块,放在半
径 R1=2 m 的水平圆盘边缘 A 处,小物块与圆盘间的动摩擦因数 μ1=0.8。圆心角
为 θ=37°,半径 R2=2.5 m 的光滑圆弧轨道 BC 与水平轨道光滑连接于 C 点,小
物块与水平轨道间的动摩擦因数为 μ2=0.5。开始圆盘静止,在电动机的带动下绕
过圆心 O1 的竖直轴缓慢加速转动,某时刻小物块沿纸面水平方向飞出(此时 O1
与 A 连线垂直纸面),恰好沿切线进入圆弧轨道 B 处,经过圆弧 BC 进入水平轨道
CD,在 D 处进入圆心为 O3,半径为 R3=0.5 m 的光滑竖直圆轨道,绕过圆轨道
后沿水平轨道 DF 向右运动。设最大静摩擦力等于滑动摩擦力, sin 37°=0.6,
cos 37°=0.8,g 取 10 m/s2,求:
图 9
(1)圆盘对小物块 m 做的功;
(2)小物块刚离开圆盘时 A、B 两点间的水平距离;
(3)假设竖直圆轨道可以左右移动,要使小物块能够通过竖直圆轨道,求竖直圆轨
道底端 D 与圆弧轨道底端 C 之间的距离范围和小物块的最终位置。
解析 (1)小物块刚滑出圆盘时 μ1mg=mv
R1
,
得到 vA=4 m/s
由动能定理可得到 W=1
2mv2A,得到 W=1.6 J。
(2)物块正好切入圆弧面,由平抛运动知识可得
在 B 处的竖直方向速度大小为 vBy=vAtan 37°,
运动时间 t=vBy
g
AB 间的水平距离 x=vAt=1.2 m。
(3)物块刚好通过竖直完整圆轨道最高点 E 处,有
mg=mv
R3
由 B 到 E 点由动能定理得到
mgR2(1-cos 37°)-μ2mgL-mg·2R3=1
2mv2E-1
2mv2B,
且 vB= vA
cos 37°
= 4
0.8 m/s=5 m/s
可得 L=1 m
即 D、C 之间距离不大于 1 m 时物块可通过竖直圆,最后物块必定停止,由动能
定理可得
mgR2(1-cos 37°)-μ2mgx=0-1
2mv2B
即最后物块停在离 C 位置 3.5 m 处。
答案 (1)0.6 J (2)1.2 m (3)见解析
12.(2018·浙江永康一中高二模拟)在竖直平面内建立如图 10 所示的平面直角坐
标系。将一绝缘细杆的 OM 部分弯成抛物线形状,其抛物线部分的方程 y=-5
9
x2 ,MN 部分为直线并与抛物线在 M 点相切。将弯好的绝缘细杆的 O 端固定在
坐标原点且与 x 轴相切,与平面直角坐标系共面。已知绝缘细杆的 M 点纵坐标 yM
=-0.8 m。一处于原长的绝缘轻弹簧套在 MN 杆上,弹簧下端固定在 N 点。现将
一质量 m=0.1 kg、带电荷量 q=+10-3 C 的小球(中间有孔)套在绝缘杆上,从 O
点以初速度 v0=5 m/s 水平抛出,到达 M 点时速度大小为 vM=6 m/s,继续沿直杆
下滑压缩弹簧到最低点 C(图中未画出),然后小球又被弹簧反弹恰能到达 M 点。
已知小球与绝缘杆间的动摩擦因数 μ=1
6
,整个装置处于沿 y 轴负方向的匀强电场
中,电场强度大小 E=103 N/C,若 g=10 m/s2,sin 37°=0.6,cos 37°=0.8,空气
阻力忽略不计。求:
图 10
(1)抛出的小球沿绝缘杆抛物线 OM 部分滑动时克服摩擦力做的功;
(2)上述过程中弹簧的最大弹性势能;
(3)要使带电小球在抛物线部分下滑过程中无能量损失,所施加的匀强电场强度为
多大?
解析 (1)对抛出的小球沿绝缘杆抛物线 OM 部分滑动过程应用动能定理可得
mgh+qEh-W 克 f=1
2mv 2M-1
2mv20
解得 W 克 f=1.05 J。
(2)小球又被弹簧反弹恰能到达 M 点,设沿 MN 下滑的最大距离为 s,MN 杆与水
平方向的夹角为 θ,从 M 点开始到再次返回到 M 点过程由动能定理可得
-μ(mg+qE)2scos θ=0-1
2mv 2M
根据抛物线部分的方程 y=-5
9x2 可知,当 y=-0.8 m 时,x=1.2 m
由类平抛运动规律可得 tan θ=y
x
2
,解得 θ=53°
设弹簧的最大弹性势能为 Ep,从 M 点到将弹簧压缩至最低点过程由动能定理可
得
mgssin θ+qEssin θ-μ(mg+qE)scos θ-W 弹
=0-1
2mv 2M
且 Ep=W 弹
联立解得 Ep=8.1 J。
(3)要使带电小球在抛物线部分下滑过程中无能量损失,则小球的运动轨迹应与轨
道抛物线重合,设小球在竖直方向加速度为 a,由抛体运动规律可得
y=-1
2at2,x=v0t
由轨道方程 y=-5
9x2 得 a
2v
=5
9
据牛顿第二定律可得 a=mg+qE′
m
解得 E′=16
9
×103 N/C。
答案 (1)1.05 J (2)8.1 J (3)16
9
×103 N/C