

- 364.00 KB
- 2021-06-02 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
专题一 力与物体的平衡
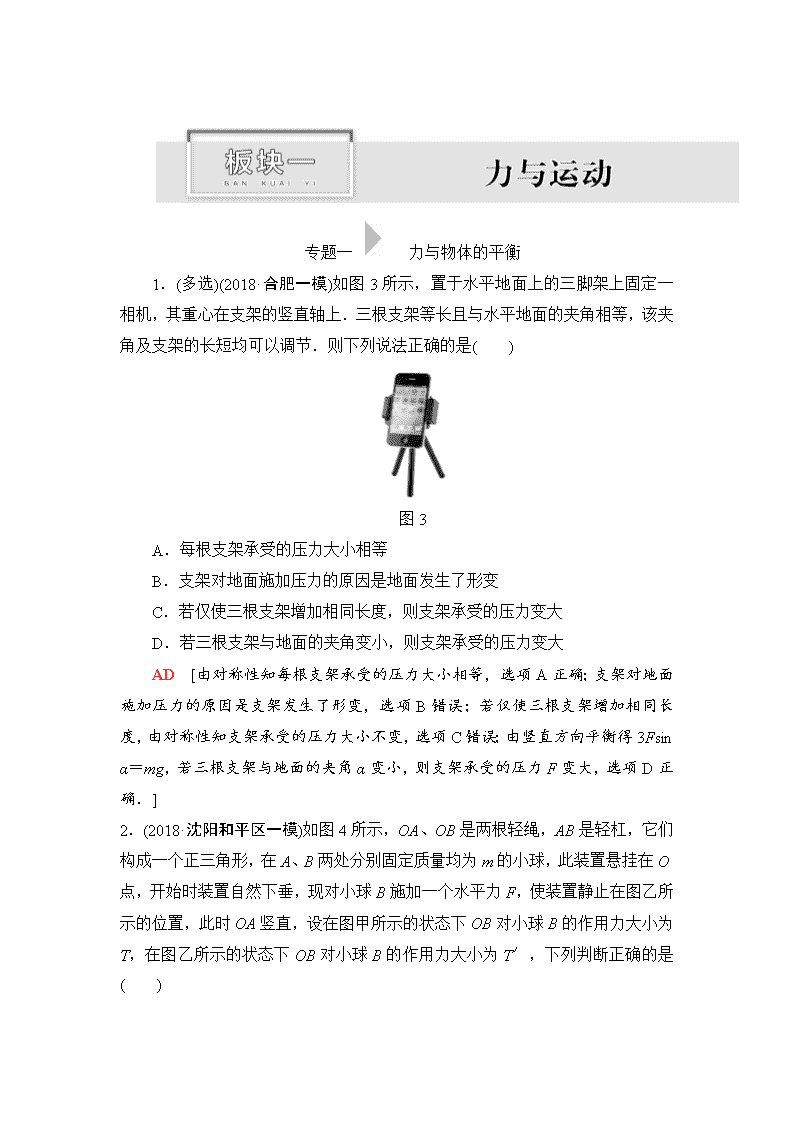
1.(多选)(2018·合肥一模)如图3所示,置于水平地面上的三脚架上固定一相机,其重心在支架的竖直轴上.三根支架等长且与水平地面的夹角相等,该夹角及支架的长短均可以调节.则下列说法正确的是( )
图3
A.每根支架承受的压力大小相等
B.支架对地面施加压力的原因是地面发生了形变
C.若仅使三根支架增加相同长度,则支架承受的压力变大
D.若三根支架与地面的夹角变小,则支架承受的压力变大
AD [由对称性知每根支架承受的压力大小相等,选项A正确;支架对地面施加压力的原因是支架发生了形变,选项B错误;若仅使三根支架增加相同长度,由对称性知支架承受的压力大小不变,选项C错误;由竖直方向平衡得3Fsin α=mg,若三根支架与地面的夹角α变小,则支架承受的压力F变大,选项D正确.]
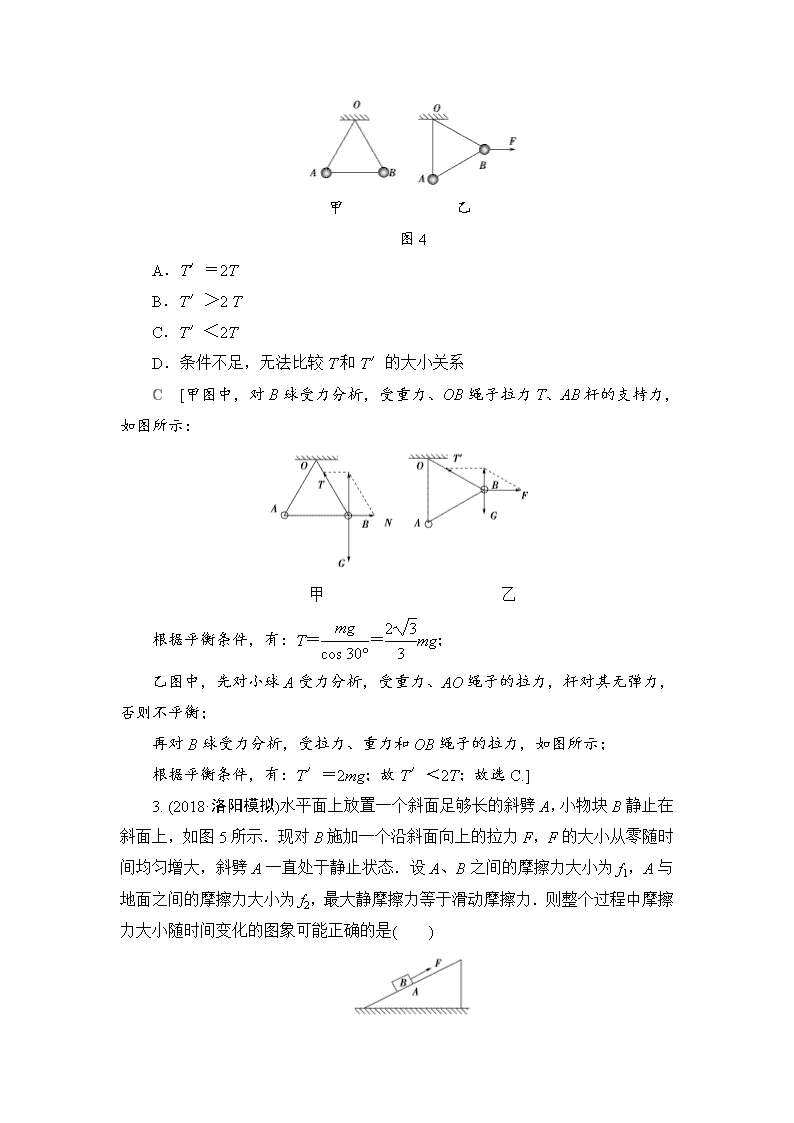
2.(2018·沈阳和平区一模)如图4所示,OA、OB是两根轻绳,AB是轻杠,它们构成一个正三角形,在A、B两处分别固定质量均为m的小球,此装置悬挂在O点,开始时装置自然下垂,现对小球B施加一个水平力F,使装置静止在图乙所示的位置,此时OA竖直,设在图甲所示的状态下OB对小球B的作用力大小为T,在图乙所示的状态下OB对小球B的作用力大小为T′,下列判断正确的是( )
甲 乙
图4
A.T′=2T
B.T′>2 T
C.T′<2T
D.条件不足,无法比较T和T′的大小关系
C [甲图中,对B球受力分析,受重力、OB绳子拉力T、AB杆的支持力,如图所示:
甲 乙
根据平衡条件,有:T==mg;
乙图中,先对小球A受力分析,受重力、AO绳子的拉力,杆对其无弹力,否则不平衡;
再对B球受力分析,受拉力、重力和OB绳子的拉力,如图所示;
根据平衡条件,有:T′=2mg;故T′<2T;故选C.]
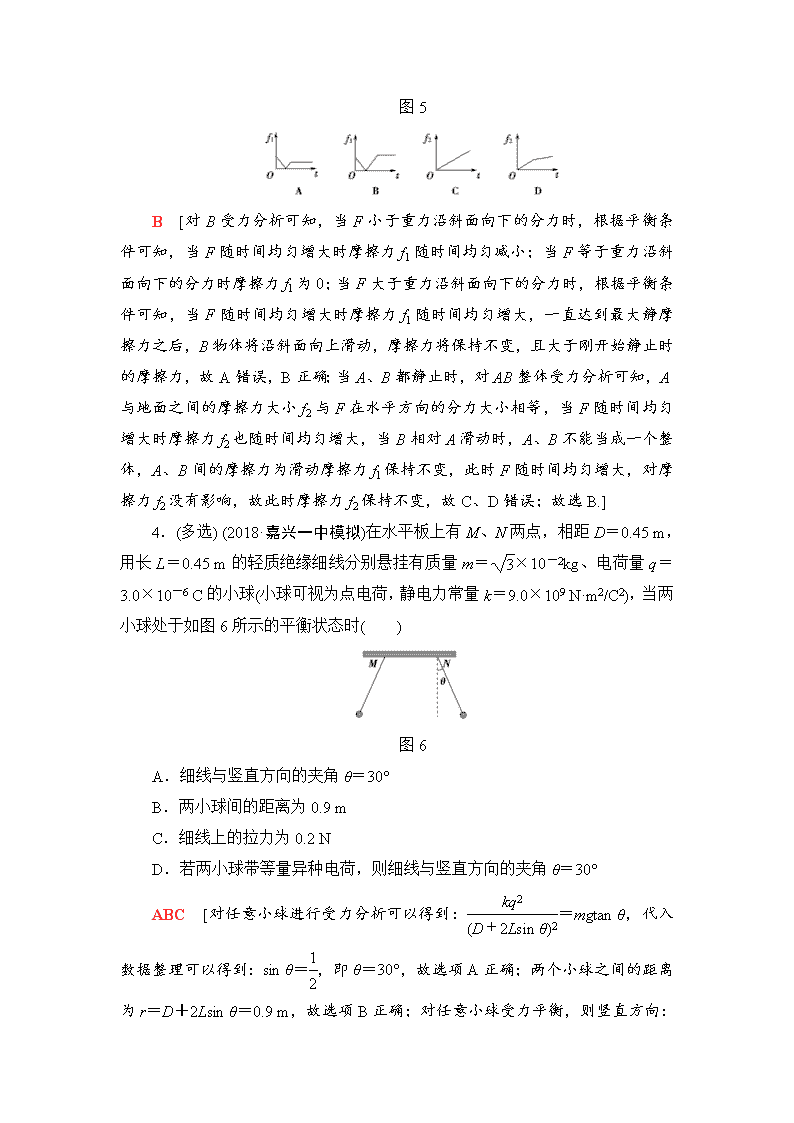
3. (2018·洛阳模拟)水平面上放置一个斜面足够长的斜劈A,小物块B静止在斜面上,如图5所示.现对B施加一个沿斜面向上的拉力F,F的大小从零随时间均匀增大,斜劈A一直处于静止状态.设A、B之间的摩擦力大小为f1,A与地面之间的摩擦力大小为f2,最大静摩擦力等于滑动摩擦力.则整个过程中摩擦力大小随时间变化的图象可能正确的是( )
图5
B [对B受力分析可知,当F小于重力沿斜面向下的分力时,根据平衡条件可知,当F随时间均匀增大时摩擦力f1随时间均匀减小;当F等于重力沿斜面向下的分力时摩擦力f1为0;当F大于重力沿斜面向下的分力时,根据平衡条件可知,当F随时间均匀增大时摩擦力f1随时间均匀增大,一直达到最大静摩擦力之后,B物体将沿斜面向上滑动,摩擦力将保持不变,且大于刚开始静止时的摩擦力,故A错误,B正确;当A、B都静止时,对AB整体受力分析可知,A与地面之间的摩擦力大小f2与F在水平方向的分力大小相等,当F随时间均匀增大时摩擦力f2也随时间均匀增大,当B相对A滑动时,A、B不能当成一个整体,A、B间的摩擦力为滑动摩擦力f1保持不变,此时F随时间均匀增大,对摩擦力f2没有影响,故此时摩擦力f2保持不变,故C、D错误;故选B.]
4.(多选) (2018·嘉兴一中模拟)在水平板上有M、N两点,相距D=0.45 m,用长L=0.45 m的轻质绝缘细线分别悬挂有质量m=×10-2kg、电荷量q=3.0×10-6 C的小球(小球可视为点电荷,静电力常量k=9.0×109 N·m2/C2),当两小球处于如图6所示的平衡状态时( )
图6
A.细线与竖直方向的夹角θ=30°
B.两小球间的距离为0.9 m
C.细线上的拉力为0.2 N
D.若两小球带等量异种电荷,则细线与竖直方向的夹角θ=30°
ABC [对任意小球进行受力分析可以得到:=mgtan θ,代入数据整理可以得到:sin θ=,即θ=30°,故选项A正确;两个小球之间的距离为r=D+2Lsin θ=0.9 m,故选项B正确;对任意小球受力平衡,则竖直方向:F
cos θ=mg,代入数据整理可以得到:F=0.2 N,故选项C正确;当两小球带等量异种电荷时,则:=mgtan θ,整理可知选项D错误.]
5.(2018·河北名校联盟联考)如图7所示,边长为l、质量为m的等边三角形导线框用绝缘细线悬挂于天花板上,导线框中通一逆时针方向的电流,图中虚线过ab边中点和ac边中点,在虚线的下方有一垂直于导线框向里的匀强磁场,其磁感应强度大小为B,此时导线框处于静止状态,细线中的拉力为F1;保持其他条件不变,现将虚线下方的磁场移至虚线上方,此时细线中拉力为F2,则导线框中的电流大小为( )
图7
A. B.
C. D.
A [当匀强磁场在虚线的下方时,bc边所受的安培力为Fbc=BIl,方向竖直向上,ac边和ab边所受安培力大小相等,Fab=Fac=BIl,且两个安培力的夹角为120°,因此ac边和ab边所受安培力的合力为BIl,方向竖直向下,则整个导线框所受的安培力为BIl,方向竖直向上,根据导线框处于平衡状态可得F1+BIl=mg.当匀强磁场在虚线的上方时,ac边和ab边所受安培力大小相等,均为Fab=Fac=BIl,且两个安培力的夹角为120°,因此ac边和ab边所受安培力的合力为BIl,方向竖直向下,则整个导线框所受的安培力为BIl,方向竖直向下,根据导线框处于平衡状态可得F2-BIl=mg,联立解得导线框中的电流大小为I=
,选项A正确.]
6.(2018·抚顺一模)用一轻绳将小球P系于光滑墙壁上的O点,在墙壁和球P之间夹有一矩形物块 Q,如图10所示.P、Q均处于静止状态,则下列相关说法正确的是( )
图10
A.P受3个力
B.Q受3个力
C.若绳子变短,Q受到的静摩擦力将增大
D.若绳子变长,绳子的拉力将变小
D [P受到重力、Q的支持力、Q的静摩擦力、绳子的拉力,共4个力作用,故A错误.Q受到重力、墙壁的弹力、P的压力和静摩擦力,共4个力作用,故B错误.Q受到的静摩擦力竖直向上,与其重力平衡,与绳子长度无关,所以若绳子变短,Q受到的静摩擦力不变,故C错误.设绳子与竖直方向的夹角为α,P的重力为G,绳子的拉力大小为F,则由平衡条件得:f=GQ,GP+f=Fcos α,则GP+GQ=Fcos α,GP与GQ不变,若绳子变长,α变小,cos α变大,则F变小,故D正确.]
7.(2018·南阳一中模拟)如图11所示,半圆形框架竖直放置在粗糙的水平地面上,光滑的小球P在水平外力的作用下处于静止状态,P与圆心O的连线与水平面的夹角为θ,将力F在竖直面内沿顺时针方向缓慢地转过90°,框架与小球始终保持静止状态.在此过程中下列说法正确的是( )
图11
A.框架对小球的支持力先减小后增大
B.拉力F的最小值为mgcos θ
C.地面对框架的摩擦力先减小后增大
D.框架对地面的压力先增大后减小
B [以小球为研究对象,分析受力情况,作出受力示意图,如图所示.
根据几何关系可知,力F顺时针转动至竖直向上之前,支持力N逐渐减小,F先减小后增大,当F的方向沿圆的切线方向向上时,F最小,此时:F=mgcos θ,故A错误,B正确.以框架与小球组成的整体为研究对象,整体受到重力、地面的支持力、地面的摩擦力以及力F的作用;由图可知,F在顺时针方向转动的过程中,F沿水平方向的分力逐渐减小,所以地面对框架的摩擦力始终在减小,故C错误.F沿竖直方向的分力逐渐增大,所以地面对框架的支持力始终在减小,故D错误.故选B.]
8. (多选)城市中的路灯、无轨电车的供电线路等,经常用三角形的结构悬挂,如图13是这一类结构的简化模型.图中轻杆OB可以绕过B点且垂直于纸面的轴自由转动,钢索OA和杆OB的质量都可以忽略不计,设悬挂物的重力为G,∠ABO=90°,AB>OB.某次产品质量检测和性能测试中保持A、B两点不动,只改变钢索OA的长度,关于钢索OA的拉力F1和杆OB上的支持力F2的变化情况,下列说法正确的有( )
图13
A.从图示位置开始缩短钢索OA,钢索OA的拉力F1先减小后增大
B.从图示位置开始缩短钢索OA,杆OB上的支持力F2大小不变
C.从图示位置开始伸长钢索OA,钢索OA的拉力F1增大
D.从图示位置开始伸长钢索OA,杆OB上的支持力F2先减小后增大
BC [设钢索OA的长度为L,杆OB的长度为R,A、B两点间的距离为H,根据相似三角形知识可知==,所以从题图图示位置开始缩短钢索OA,钢索OA的拉力F1减小,杆OB上的支持力F2
大小不变,选项A错误,B正确;从题图图示位置开始伸长钢索OA,钢索OA的拉力F1增大,杆OB上的支持力F2大小不变,选项C正确,D错误.]
9.(多选)(2018·广东五校联考)双十一期间,智能仓储机器人在仓库运作的情景被广泛报道.如图15所示,一个智能仓储机器人搬运着A、B、C三个快递包裹,三者质量相同,在移动过程中A、B、C与机器人没有发生相对运动,则下列说法正确的是( )
图15
A.机器人在扫描二维码时,采用了传感器技术
B.如果机器人向右做匀速直线运动,B受到2个力的作用
C.如果机器人向右做匀减速直线运动,C受到向右的摩擦力
D.如果机器人向右做匀减速直线运动,机器人对A的摩擦力是B对C的摩擦力的3倍
AD [机器人在扫描二维码时,拍摄过程采用了光学传感器,A正确;机器人向右做匀速直线运动时,B受到重力、A对B的支持力和C对B的压力,共三个力,B错误;机器人向右做匀减速直线运动时,加速度方向向左,则C受到向左的摩擦力,C错误;机器人向右做匀减速直线运动时,根据牛顿定律,对物体C:fBC=ma,对ABC整体:f′=3ma,所以机器人对A的摩擦力是B对C的摩擦力的3倍,D正确.]
10.(2018·第二次全国大联考Ⅲ卷)某班级同学要调换座位,一同学用斜向上的拉力拖动桌子沿水平地面匀速运动.已知桌子的总质量为10 kg,若拉力的最小值为50 N,此时拉力与水平方向间的夹角为θ.重力加速度大小为g=10 m/s2,桌子与地面间的动摩擦因数为μ,不计空气阻力,则( )
A.μ=,θ=60° B.μ=,θ=60°
C.μ=,θ=30° D.μ=,θ=30°
A [对桌子受力分析,如图所示.根据平衡条件可知,水平方向有Fcos θ-Ff=0,竖直方向有FN+Fsin θ-G=0,其中Ff=μFN,故F=,令μ=tan α,则F==;当θ=α时,F有最小值,Fmin=Gsin α=50 N,解得α=60°,故μ=tan 60°=,θ=60°,选项A正确.