

- 2.66 MB
- 2021-05-17 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
知识改变命运 勤奋塑造成功
整理人 落叶
时间 2011-4-15
天才是百分之九十九的勤奋加百分之一的灵感
三菱 FX系列 PLC 教学课程---一个从基础讲起的电梯控制实例
第一节 PLC简述
一、PLC 的特点:
1、高可靠性
2、编程简单,使用方便
可采用梯形图编程方式,与实际继电器控制电路非常接近,一般电气工作者很容易接受。
3、环境要求低
适用于恶劣的工业环境。
4、体积小,重量轻
5、扩充方便,组合灵活
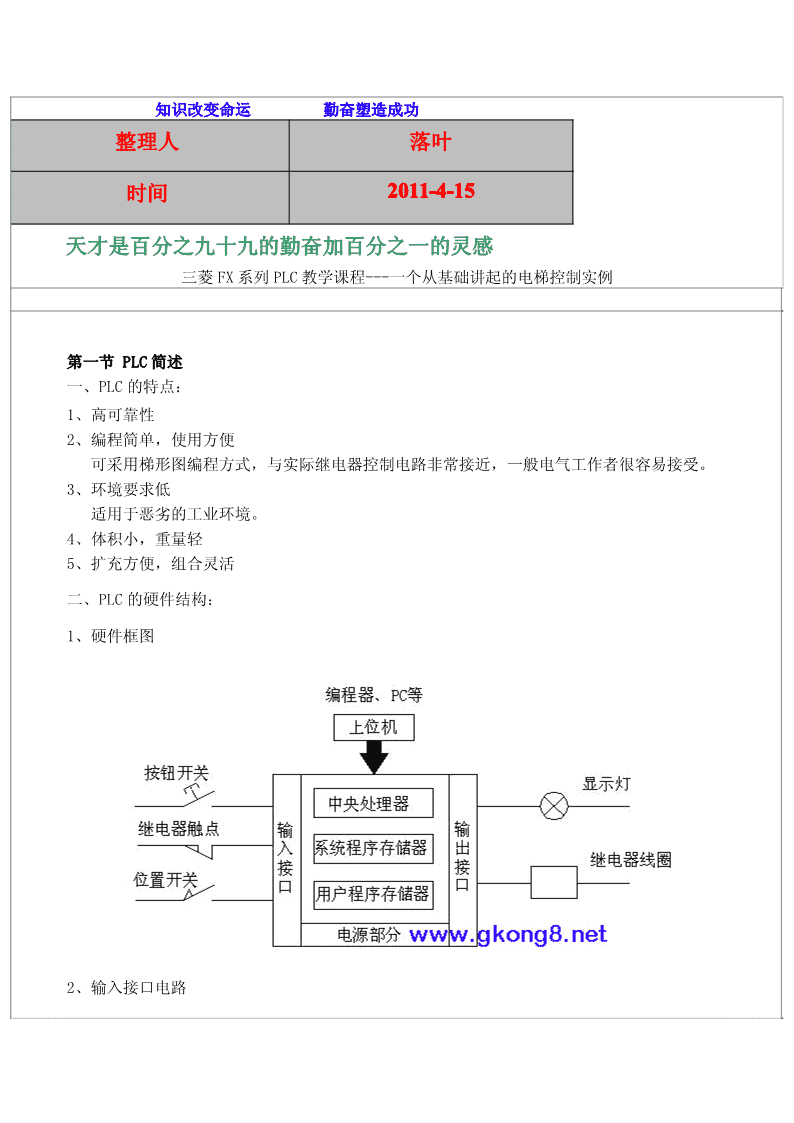
二、PLC 的硬件结构:
1、硬件框图
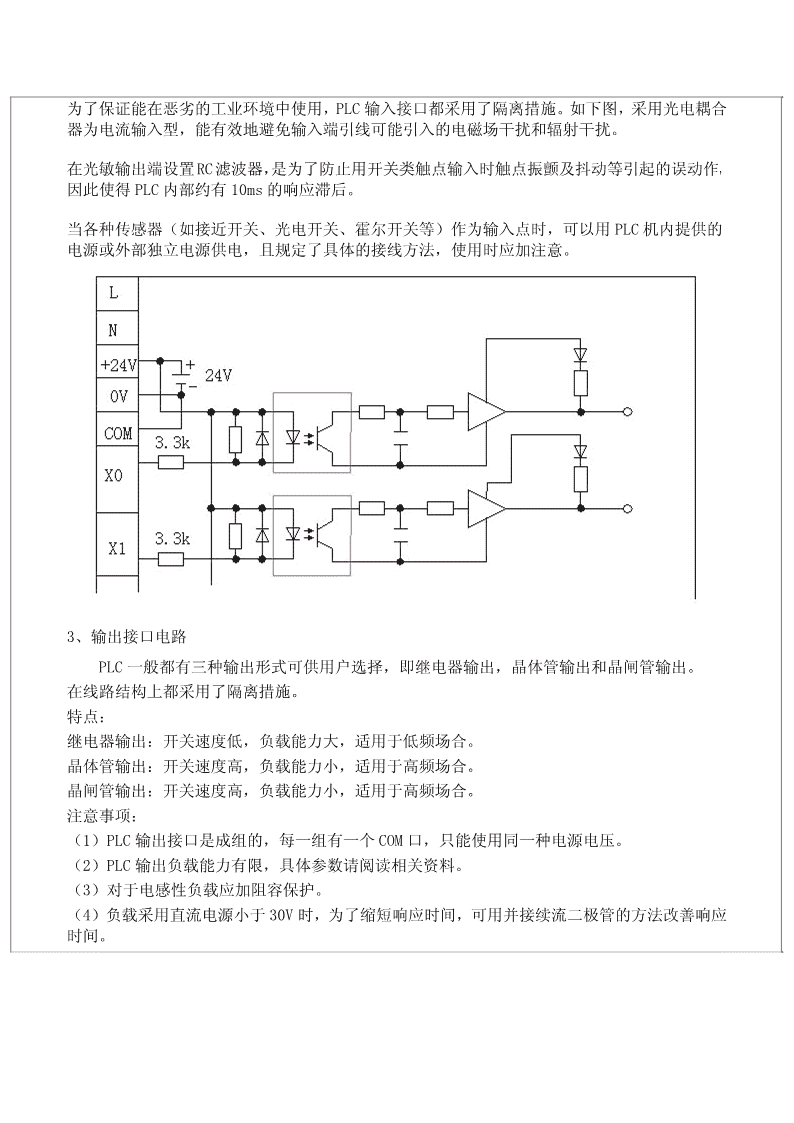
2、输入接口电路
为了保证能在恶劣的工业环境中使用,PLC 输入接口都采用了隔离措施。如下图,采用光电耦合
器为电流输入型,能有效地避免输入端引线可能引入的电磁场干扰和辐射干扰。
在光敏输出端设置RC滤波器,是为了防止用开关类触点输入时触点振颤及抖动等引起的误动作,
因此使得 PLC内部约有 10ms 的响应滞后。
当各种传感器(如接近开关、光电开关、霍尔开关等)作为输入点时,可以用 PLC机内提供的
电源或外部独立电源供电,且规定了具体的接线方法,使用时应加注意。
3、输出接口电路
PLC 一般都有三种输出形式可供用户选择,即继电器输出,晶体管输出和晶闸管输出。
在线路结构上都采用了隔离措施。
特点:
继电器输出:开关速度低,负载能力大,适用于低频场合。
晶体管输出:开关速度高,负载能力小,适用于高频场合。
晶闸管输出:开关速度高,负载能力小,适用于高频场合。
注意事项:
(1)PLC 输出接口是成组的,每一组有一个 COM 口,只能使用同一种电源电压。
(2)PLC 输出负载能力有限,具体参数请阅读相关资料。
(3)对于电感性负载应加阻容保护。
(4)负载采用直流电源小于 30V 时,为了缩短响应时间,可用并接续流二极管的方法改善响应
时间。
三、三菱 FX2 PLC 实物图及面板上的 LED指示说明(用鼠标在各处点点)全屏观看
第二节 PLC 的工作过程
PLC 大多采用成批输入/输出的周期扫描方式工作,按用户程序的先后次序逐条运行。一
个完整的周期可分为三个阶段:
(一)输入刷新阶段
程序开始时,监控程序使机器以扫描方式逐个输入所有输入端口上的信号,并依次存入对
应的输入映象寄存器。
(二)程序处理阶段
所有的输入端口采样结束后,即开始进行逻辑运算处理,根据用户输入的控制程序,从第
一条开始,逐条加以执行,并将相应的逻辑运行结果,存入对应的中间元件和输出元件映象寄
存器,当最后一条控制程序执行完毕后,即转入输出刷新处理。
(三)输出刷新阶段
将输出元件映象寄存器的内容,从第一个输出端口开始,到最后一个结束,依次读入对应
的输出锁存器,从而驱动输出器件形成可编程的实际输出。
一般地,PLC 的一个扫描周期约 10ms,另外,可编程序控制器的输入/输出还有响应滞后
(输入滤波约 10ms),继电器机械滞后约 10ms,所以,一个信号从输入到实际输出,大约有
20--30ms 的滞后。
输入信号的有效宽度应大于 1个周期+10ms。
第三节 三菱 FX PLC 中各种元件介绍(以 FX2-64MR 为例)
一、输入继电器 X
• X、Y 还有无数个常开、常闭触点供编程使用。
• Y 外部分仅有一个常开触点供带动负载使用。
• 可以看出每组都是 8 个
• 输入输出点数根据实际工程需要来确定。
• 可采用主机+扩展的方式来使用,扩展的编号
依次编下去。
X0--X7
X10-X17
X20-X27
X30-X37
(共 32点)
二、输出继电器 Y
Y0--Y7
Y10--Y17
Y20--Y27
Y30--Y37
(共 32点)
三、辅助继电器 M
(1)通用辅助继电器
M0--M499(共 500 个),关闭电源后重新启动后,通用继电器不能保护断电前的状态。
(2)掉电保持辅助继电器
M500--M1023(共 524 个),PLC 断电后再运行时,能保持断电前的工作状态,采用锂电池作
为 PLC掉电保持的后备电源。
(3)特殊辅助继电器
M8000--M8255(共 156 点),有特殊用途,将在其它章节中另作介绍。
辅助继电器都有无数个常开、常闭触点供编程使用,只能作为中间继电器使用,不能作为
外部输出负载使用。
四、状态继电器 S
(1)通用状态继电器 S0--S499
(2)掉电保持型状态继电器 S499-S899
(3)供信号报警用:S900-S999
状态继电器 S是对工作步进控制进行简易编程的重要元件,这里不作进一步的介绍。
五、定时器 T
(1)定时器
T0--T199 (200 只):时钟脉冲为 100ms 的定时器,即当设定值 K=1 时,延时 100ms。
设定范围为 0.1--3276.7 秒。
T200--T245(46 只):时钟脉冲为 10ms 的定时器,即当设定值 K=1 时,延时 10mS。
设定范围为 0.01--327.67 秒。
(2)积算定时器
T246--T249(4 只) :时钟脉冲为 1ms 的积算定时器。
设定范围:0.001--32.767 秒。
T250--T255 (6 只) :时钟脉冲为 100ms 的积算定时器。
设定范围:0.1--3267.7 秒。
积算定时器的意义:当控制积算定时器的回路接通时,定时器开始计算延时时间,当设定时间
到时定时器动作,如果在定时器未动作之前控制回路断开或掉电,积算定时器能保持已经计算
的时间,待控制回路重新接通时,积算定时器从已积算的值开始计算。
积算定时器可以用 RST命令复位。
五、计数器 C
(1)16bit 加计数器
C0--C99(100 点):通用型
C100-C199(100 点):掉电保持型
设定值范围:K1--K32767
(2)32bit 可逆计数器
C200--C219(20 点):通用型
C220--C234(15 点):掉电保持型。
设定值范围:-2147483648 到+2147483647
可逆计数器的计数方向(加计数或减计数)由特殊辅助继电器 M8200--M8234 设定。
即 M8△△△接通时作减计数,当 M8△△△断开时作加计数。
(3)高速计数器:C235--C255(后面章节实例中作介绍)
六、数据寄存器 D
D0--D199(200 只):通用型数据寄存器,即掉电时全部数据均清零。
D200--D511(312 只):掉电保护型数据寄存器。
七、变址寄存器(在实例中作介绍)
第四节 FX2 PLC 基本指令
2-2-1 触点取用与线圈输出指令 LD、LDI、OUT
2-2-2 单个触点串联指令 AND、ANI
2-2-3 单个触点并联指令 OR、ORI
2-2-4 串联电路块的并联 OR
2-2-5 并联电路块的串联 ANB
2-2-6 LDP、LDF、ANDP、ANDF、ORP、ORF(FX2n 型有)
2-2-7 多重输出电路 MPS、MRD、MPP
2-2-8 主控及主控复位指令 MCMCR
2-2-9 脉冲输出 PLS、PLF
2-2-10 自保持与解除 SET、RST
2-2-11 计数器、定时器线圈输出和复位指令 OUT、RST
2-2-12 空操作指令 NOP
2-2-12 程序结束指令 END
2-2-13 梯形图设计的规则和技巧
2-2-14 双重输出动作及其对策
LD,LDI,OUT 指令
指令助记符与功能:
符号、名称 功能 可用元件 程序步
LD 取 a 触点逻辑运算开始 X,Y,M,S,T,C 1
LDI 取反 b 触点逻辑运算开始 X,Y,M,S,T,C 1
OUT 输出 线圈驱动 Y,M,S,T,C
Y,M:1
S,特,M:2
T:3
C:3-5
注:当使用 M1536-M3071 时,程序步加 1。
指令说明:
• LD,LDI 指令用于将触点接到母线上。另外,与后面讲到的 ANB指令组合,在分支起点
处也可使用。
• OUT 指令是对输出继电器、辅助继电器、状态、定时器、计数器的线圈驱动指令,对输
入继电器不能使用。
• OUT 指令可作多次并联使用。(在下图中,在 OUT M100 之后,接 OUT T0)
编程:
0 LD X000
1 OUT Y000
2 LDI X001
3 OUT M100
4 OUT T0 K19 ——程序步自动管理空 2步
7 LD T0
8 OUT Y001
定时器、计数器的程序:
• 对于定时器的计时线圈或计数器的计数线圈,使用 OUT指令以后,必须设定常数 K。此
外,也可指定数据寄存器的地址号。
• 常数 K的设定范围、实际的定时器常数、相对于 OUT指令的程序步数(包括设定值)如
下表所示。
定时器、计数器 K的设定范围 实际的设定值 步数
1ms定时器 1-32,767 0.001-32.767 秒 3
10ms 定时器
1-32,767
0.01-327.67 秒
3
100ms 定时器 0.1-3,276.7 秒
16 位计数器 1-32,767 同左 3
32 位计数器 -2,147,483,648 - +2,147,483,647 同左 3
AND,ANI 指令
助记符与功能:
符号、名称 功能 可用软元件 程序步
AND 与 a触点串联连接 X,Y,M,S,T,C 1
ANI 与非 b触点串联连接 X,Y,M,S,T,C 1
当使用 M1536-M3071 时,程序步加 1。
指令说明:
• 用 AND,ANI 指令可进行 1个触点的串联连接。串联触点的数量不受限制,该指令可多
次使用。
• OUT 指令后,通过触点对其他线圈使用 OUT 指令,称之为纵接输出,(下图的 OUT M101
与 OUT Y004)
这种纵接输出,如果顺序不错,可多次重复。
串联触点数和纵接输出次数不受限制,但使用图形编程设备和打印机则有限制。
建议尽量做到 1行不超过 10个触点和 1个级圈,总共不要超过 24行。
编程:
0 LD X002
1 AND X000
2 OUT Y003
3 LD Y003
4 ANI X003
5 OUT M101
6 AND T1
7 OUT Y004
如上图所示,紧接着 OUT M101 以后通过触点 T1
可以驱动 OUT Y004,但如是驱动顺序相反(如
左图所示)时,则必须使用后面讲到的 MPS 和
MPP 命令。
OR,ORI 指令
指令助记符与功能:
指令助记符、名称 功能 可用软元件 程序步
OR 或 a 触点并联连接 X,Y,M,S,T,C 1
ORI 或非 b 触点并联连接 X,Y,M,S,T,C 1
当使用 M1536-M3071 时,程序步加 1
指令说明:
• OR、ORI 用作 1 个触点的并联连接指令。
串联连接 2个以上触点时,并将这种串联电路块与其他电路并联连接时,采用后面讲到的 ORB
指令。
• OR,ORI 是从该指令的步开始,与前面的 LD,LDI 指令步,进行并联连接。并联连接的
次数不受限制,但使用图形编程设备和打印机时受限制(24 行以下)
编程:
0 LD X004
1 OR X006
2 ORI M102
3 OUT Y005
4 LDI Y005
5 AND X007
6 OR M103
7 ANI X010
8 OR M110
9 OUT M103
ORB 指令
指令助记符与功能
指令助记符、名称 功能 程序步
ORB 电路块或 串联电路块的并联连接 1
指令说明
• 2 个以上的触点串联连接的电路称为串联电路块。将串联电路并联连接时,分支开始用
LD、LDI 指令,分支结束用 ORB指令。
• ORB 指令与后面讲的 ANB 指令等一样,是不带软元件地址号的独立指令。
• 有多个并联电路时,若对每个电路块使用 ORB指令,则并联电路没有限制。(见正确编
程程序)
• ORB 也可以成批地使用,但是由于 LD,LDI 指令的重复使用次数限制在 8 次以下,请务
必注意。(见编程不佳的程序)
编程
正确编程程序
1 LD X000
2 AND X001
3 LD X002
4 AND X003
5 ORB
6 LDI X004
7 AND X006
8 ORB
9 OUT Y006
编程不佳的程序
1 LD X000
2 AND X001
3 LD X002
4 AND X003
5 LDI X004
6 AND X006
7 ORB
8 ORB
9 OUT Y006
ANB 指令
指令助记符与功能:
指令助记符、名称 功能 程序步
ANB 电路块与 并联电路块的串联连接 1
指令说明:
• 当分支电路(并联电路块)与前面的电路串联连接时,使用 ANB 指令,分支的起点用
LD,LDI 指令,并联电路块结束后用 ANB 指令,与前面的电路串联。
• 若多个并联电路块按顺序和前面的电路串联连接时,则 ANB 指令的使用次数没有限制。
• 也可成批地使用 ANB 指令,但在这种场合,与 ORB 指令一样,LD、LDI 指令的使用次数
是有限制的(8次以下),请务必请意
编程:
0 LD X000
1 OR X001
2 LD X002
3 AND X003
4 LDI X004
5 AND X005
6 ORB
7 OR X006
8 ANB
9 OR X003
10 OUT Y007
LDP、LDF、ANDP、ANDF、ORP、ORF 指令
指令助指符与功能:
指令助记符、名称 功能 可用软元件 程序步
LDP 取脉冲 上升沿检测运算开始 X、Y、M、S、T、C 1
LDF 取脉冲 下降沿检测运算开始 X、Y、M、S、T、C 1
ANDP 与脉冲 上升沿检测串联连接 X、Y、M、S、T、C 1
ANDF 与脉冲 下降沿检测串联连接 X、Y、M、S、T、C 1
ORP 或脉冲 上升沿检测并联连接 X、Y、M、S、T、C 1
ORF 或脉冲 下降沿检测并联连接 X、Y、M、S、T、C 1
当使用 M1536--M3071 时,程序步加 1,以上指令 FX2N 中才有。
指令说明:
• LDP、ANDP、ORP 指令是进行上升沿检测的触点指令,仅在指定位软件上沿时(即由 OFF
→ON 变化时)接通 1 个扫描周期。
• LDF、ANDF、ORF 指令是进行下降沿检测的触点指令,仅在指定位软元件下降时(即由
ON→OFF 变化时)接通 1 个扫描周期。
编程:
例 1:
0 LDP X000
1 ORP X001
2 OUT M0
3 LD M8000
4 ANDP X002
5 OUT M1
例 2:
0 LDF X000
1 ORF X001
2 OUT M0
3 LD M8000
4 ANDF X002
5 OUT M1
图示理解:
MPS、MRD、MPP 指令
指令助记符与功能
指令助记符、名称 功能 程序步
MPS 进栈 进栈 1
MRD 读栈 读栈 1
MPP 出栈 出栈 1
指令说明
• 在可编程序控制器中有 11个存储器,用来存
储运算的中间结果,被称为栈存储器。使用一
次 MPS 指令就将此时刻的运算结果送入栈存
储器的第 1段,再使用 MPS 指令,又将此时
刻的运算结果送入栈存储器的第 1段,而将原
先存入第一段的数据移到第二段。以此类推。
• 使用 MPP 指令,将最上段的数据读出,同时
该数据从栈存储器中消失,下面的各段数据顺
序向上移动。即所谓后进先出的原则。
• MRD 是读出最上段所存的最新数据的专用指
令,栈存储器内的数据不发生移动。
• 这些指令都是不带软元件地址的独立指令。
编程
例 1:一段栈
0 LD X004
1 MPS
2 AND X005
3 OUT Y002
4 MRD
5 AND X006
6 OUT Y003
7 MRD
8 OUT Y004
9 MPP
10 AND X007
11 OUT Y005
例 2:二段栈
0 LD X000
1 MPS
2 AND X001
3 MPS
4 AND X002
5 OUT Y000
6 MPP
7 AND X003
8 OUT Y001
9 MPP
10 AND X004
11 MPS
12 AND X005
13 OUT Y002
14 MPP
15 AND X006
16 OUT Y003
例 3:四段栈
0 LD X000
1 MPS
2 AND X001
3 MPS
4 AND X002
5 MPS
6 AND X003
7 MPS
8 AND X004
9 OUT Y000
10 MPP
11 OUT Y001
12 MPP
13 OUT Y002
14 MPP
15 OUT 003
16 MPP
17 OUT Y004
请对照一下面的梯形图与例 3:
0 LD X000
1 OUT Y004
2 AND X001
3 OUT Y003
4 AND X002
5 OUT Y002
6 AND X003
7 OUT Y001
8 AND X004
9 OUT Y000
例 3中需要要三重MPS指令编
程,但是如果改成左面的电
路,实现的效果一样。编程却
很方便,不必采用 MPS指令。
MC、MCR 指令
指令助记符与功能
指令助记符、名称 功能 程序步
MC 主控指令 公共串联触点的连接 3
MCR 主控复位 公共串联触点的清除 2
指令说明
• 在下面程序示例中,输入 X000 为接通时,直接执行从 MC到 MCR 的指令,输入 X000 为
断开时,成为如下形式:
保持当前状态:积算定时器、计数器、用置位/复位指令驱动的软元件。
变成 OFF的软件:非积算定时器,用 OUT指令驱动的软元件。
• 主控(MC)指令后,母线(LD、LDI 点)移动主控触点后,MCR为将其返回原母线的指
令。
• 通过更改软元件地址号 Y、M,可多次使用主控指令。但使用同一软元件地址号时,就和
OUT 指令一样,成为双线圈输出。
编程
例 1:没有嵌套时
0 LD X000
1 MC N0 M100
4 LD X001
5 OUT Y000
6 LD X002
7 OUT Y001
8 MCR N0
没有嵌套结构时,通
用 N0 编程。N0的使用次
数没有限制。有嵌套结构
时,嵌套级 N 的地址号增
大,即 N0--N1--N2……
N7。
例 2:有嵌套时
0 LD X000
1 MC N0 M100 3 步指令
4 LD X001
5 OUT Y000
6 LD X002
7 MC N1 M101 3 步指令
10 LD X003
11 OUT Y001
12 MCR N1 2 步指令
14 LD X004
15 OUT Y002
16 MCR N0 2 步指令
PLS、PLF 指令
指令助记符、名称
指令助记符、名称 功能 程序步
PLS 上升脉冲 上升沿微分输出 2
PLF 下沿脉冲 下降沿微分输出 2
当使用 M1536--M3071 时,程序步加 1
指令说明
• 使用 PLF指令时,仅在驱动输入 OFF后 1个扫描周期内,软元件 Y、M动作。
• 使用 PLS指令时,仅在驱动输入 ON后 1个扫描周期内,软元件 Y、M动作。
编程
0 LD X000
1 PLS M0 2 步指令
3 LD M0
4 SET Y000
5 LD X001
6 PLF M1 2 步指令
8 LD M1
9 RST Y000
各元件的状态图:
SET、RST 指令
指令助记符与功能
指令助记符、名称 功能 可用软元件 程序步
SET 置位 动作保持 Y、M、S Y、M: 1
S、特 M: 2
T、C: 2
D、V、Z、特 D:3
RST 复位
消除动作保持,
寄存器清零
Y、M、S、T、C、D、V、Z
指令说明
• 在下述程序示例中,X000 一旦接通后,即使它再次成为 OFF,Y000 依然被吸合。X001
一旦接通后,即使它再次成为 OFF,Y000 仍然是释放状态。
• 对同一种软元件,SET、RST 可多次使用,顺序也可随意,但最后执行者有效。
• 此外,要使数据寄存器 D、变址寄存器 V、Z 的内容清零时,也可使用 RST 指令。
• 积算定时器 T246--T255 的当前值的复位和触点复位也可用 RST指令。
编程
0 LD X000
1 SET Y000
2 LD X001
3 RST Y000
计数器软元件的 OUT、RST
指令助记符与功能
指令助记符、名称 功能 程序步
OUT 输出 计数线圈的驱动
32 位计数器:5
16 位计数器:3
RST 复位 输出触点的复位、当前值的清零 2
内部计数器编程
0 LD X010
1 RST C0 2 步指令
3 LD X011
4 OUT C0 K10 (3步指令)
7 LD C0
8 OUT Y000
• C0 对 X011 的 OFF-ON 次数进行增计数,当它达到设定值 K10 时,输出输出点 C0 动作,
以后即使 X011 从 OFF-ON,计数器的当前值不变,输出触点依然动作。
• 为了清除这些当前值,让输出触点复位,则应令 X010 为 ON。
• 有必要在 OUT指令后面指定常数 K或用数据寄存器的地址号作间接设定。
• 对于掉电保持用计数器,即使停电,也能保持当前值,以及输出触点的工作状态或复位
状态。
高速计数器的编程
0 LD X010
1 OUT M8*** 2 步
3 LD X011
4 RST C*** 2 步
6 LD XO12
7 OUT C*** K 值(或 D) 5步
12 LD C***
13 OUT Y002
• 在 C235-C245 的单相单输入计数器中,为了指定计数方向,采用特殊辅助继电器
M8234-M8245。
• 当 X010 为 ON时,对应 C***的 M8***也 ON,这时 C***为减计数。
• 当 X010 为 OFF 时,对应 C***的 M8***也 OFF,这时 C***为增计数。
• X011 为 ON 时,计数器 C***的输出触点复位,计数器的当前值也清零。
• 当 X012 为 ON时,对依据计数器地址号确定的计数器输入 X000-X005 的 ON/OFF 进行计
数。
• 计数器的当前值增加,通过设定值(K 或 D 的内容)时输出触点置位。在减少方向上通
过设定值复位。
NOP、END 指令
指令助记符与功能
指令助记符、名称 功能 程序步
NOP 控操作 无动作 1
END 结束 输入输出处理和返回到 0步 1
指令说明
NOP 指令:
1、将程序全部清除时,全部指令成为空操作
2、若在普通指令与指令之间加入空操作(NOP)指令,则可编程序控制器可继续工作,,
而与此无关。若在编写程序过程中加入空操作指令,则在修改或追加程序时,可以减少步序号
的变化,但是程序步需要有空余。
3、若将已写入的指令换成 NOP指令,则电路会发生变化,务必请注意。
END 指令:
1、可编程序控制器反复进行输入处理、程序执行、输出处理。若在程序的最后写入 END
指令,则 END以后的其余程序步不再执行,而真接进行输出处理。
2、在程序中没有 END指令时,则处理到最终的程序步再执行输出处理,然后返回 0步处
理程序。
3、在调试期间,在各程序段插入 END指令,可依次检测各程序段的动作。这种场合,在 确
认前面电路块动作正确无误后,依次删去 END指令。
4、RUN(运行)开始时的首次执行,从执行 END指令开始。
梯形图设计的规则和技巧
一、梯形图中的触点应画在水平线上,而不能画在垂直分支上,如图 1(a),由于 X005 画在
垂直分支上,这样很难判断与其他触点的关系,也很难判断 X005 与输出线圈 Y001 的控制方向,
因此应根据从左至右,自上而下的原则。正确的画法如图 1(b)
图 1(a) 图 1(b)
二、不包含触点的分支应放放在垂直方向,不应放在水平线上,这样便于看清触点的组和对输
出线圈的控制路线,以免编程时出错。如图 2所示。
图 2(a)不正确画法
图 2(b)正确画法
三、在有几个串联电路相并联时,需钭触点最多的那条串联电路放在梯形图的最上面,在有几
个并联电路串联时,应将触点最多的那个并联放在梯形图的最左面,这样所编的程序比较明了,
使用的指令较少,如图 3所示。
图 3(a)不正确画法
图 3(b)正确的画法
四、按梯形图编制程序时一定要按从左至右,自上而下的原则进行。
五、在画梯形图时,不能将触点画在线圈的右边,而只能画在线圈的左边,如图 4所示。
图 4(a)不正确画法 图 4(a)正确画法
六、梯形图画得合理,对编程时指令的使用可减少。
双重输出动作及其对策
双重输出动作
若在顺控程序内进行线圈的双重输出(双
线圈),则后面的动作优先。
如左图所示:考虑一下在多处使用同一线圈
Y003 的情况。
例如:X001=ON,X002=OFF
初次的 Y003,因 X001 接通,因此 YOO3 ON。输
出 Y004 也 ON。
但是第二次的 Y003,因输入 X002 断开,因此其
输出改为 OFF。
因此,实际上外部输出成为:
Y003=OFF
Y004=ON
双重输出的对策
双重输出(双线圈)在程序方面并不违反输入,但是因为上述动作复杂,因此要按以下示
例改变程序。
?
FX2n 应用指令一览表
类别 功能号 指令助记符 功 能 D指令 P 指令
程
序
流
程
00 CJ 条件跳转 - O
01 CALL 调用子程序 - O
02 SRET 子程序返回 - -
03 IRET 中断返回 - -
04 EI 开中断 - -
05 DI 关中断 - -
06 FEND 主程序结束 - -
07 WDT 监视定时器 - O
08 FOR 循环区开始 - -
09 NEXT 循环区结束 - -
传
送
与
比
较
10 CMP 比较 O O
11 ZCP 区间比较 O O
12 MOV 传送 O O
13 SMOV 移位传送 - O
14 CML 取反 O O
15 BMOV 块传送 - O
16 FMOV 多点传送 O O
17 XCH 数据交换 O O
18 BCD 求 BCD 码 O O
19 BIN 求二进制码 O O
四
则
运
算
与
逻
辑
运
算
20 ADD 二进制加法 O O
21 SUB 二进制减法 O O
22 MUL 二进制乘法 O O
23 DIV 二进制除法 O O
24 INC 二进制加一 O O
25 DEC 二进制减一 O O
26 WADN 逻辑字与 O O
27 WOR 逻辑字或 O O
28 WXOR 逻辑字与或 O O
29 ENG 求补码 O O
循
30 ROR 循环右移 O O
31 ROL 循环左移 O O
32 RCR 带进位右移 O O
环
与
转
移
33 RCL 带进位左移 O O
34 SFTR 位右移 - O
35 SFTL 位左移 - O
36 WSFR 字右移 - O
37 WSFL 字左移 - O
38 SFWR FIFO 写 - O
39 SFRD FIFO 读 - O
数
据
处
理
40 ZRST 区间复位 - O
41 DECO 解码 - O
42 ENCO 编码 - O
43 SUM 求置 ON 位的总和 O O
44 BON ON 位判断 O O
45 MEAN 平均值 O O
46 ANS 标志位置 - -
47 ANR 标志复位 - O
48 SOR 二进制平方根 O O
49 FLT 二进制整数与浮点数转换 O O
高
速
处
理
50 REF 刷新 - O
51 REFE 滤波调整正 - O
52 MTR 矩阵输入 - -
53 HSCS 比较置位(高速计数器) O -
54 HSCR 比较复位(高速计数器) O -
55 HSZ 区间比较(高速计数器) O -
56 SPD 脉冲密度 - -
57 PLSY 脉冲输出 O -
58 PWM 脉宽调制 - -
59 PLSR 带加速减速的脉冲输出 O -
方
便
指
令
60 IST 状态初始化 - -
61 SER 查找数据 O O
62 ABSD 绝对值式凸轮控制 O -
63 INCD 增量式凸轮控制 - -
64 TTMR 示都定时器 - -
65 STMR 特殊定时器 - -
66 ALT 交替输出 - -
67 RAMP 斜坡输出 - -
68 ROTC 旋转工作台控制 - -
69 SORT 列表数据排序 - -
外
部
设
备
I/O
70 TKY 十键输入 O -
71 HKY 十六键输入 O -
72 DSW 数字开关输入 - -
73 SEGD 七段译码 - O
74 SEGL 带锁存七段码显示 - -
75 ARWS 方向开关 - -
76 ASC ASCII 码转换 - -
77 PR ASCII 码打印输出 - -
78 FROM 读特殊功能模块 O O
79 TO 写特殊功能模块 O O
外
部
设
备
SER
80 RS 串行通讯指令 - -
81 PRUN 八进制位传送 O O
82 ASCI 将十六进制数转换成 ASCII 码 - O
83 HEX ASCII 码转换成十六进制数 - 0
84 CCD 校验码 - O
85 VRRD 模拟量读出 - O
86 VRSC 模拟量区间 - O
87
88 PID PID 运算 - O
89
浮
点
110 ECMP 二进制浮点数比较 O O
111 EZCP 二进制浮点数区间比较 O O
118 EBCD 二进制--十进制浮点数变换 O O
119 EBIN 十进制--二进制浮点数变换 OO O
120 EAAD 二进制浮点数加法 O O
121 ESUB 二进制浮点数减法 O O
122 EMUL 二进制浮点数乘法 O O
123 EDIV 二进制浮点数除除法 O O
127 ESOR 二进制浮点数开方 O O
129 INT 二进制浮点--二进制整数转换 O O
130 SIN 浮点数 SIN 演算 O O
131 COS 浮点数 COS 演算 O O
132 TAN 浮点数 TAN 演算 O O
147 SWAP 上下位变换 O O
时
钟
运
算
160 TCMP 时钟数据比较 - O
161 TZCP 时钟数据区间比较 - O
162 TADD 时钟数据加法 - O
163 TSUB 时钟数据减法 - O
166 TRD 时钟数据读出 - O
167 TWR 时钟数据写入 - O
葛雷码
170 GRY 葛雷码转换 O O
171 GBIN 葛雷码逆转换 O O
触
点
比
较
224 LD= (S1)=(S2) O -
225 LD> (S1)>(S2) O -
226 LD< (S1)<(S2) O -
228 LD<> (S1)≠(S2) O -
229 LD<= (S1)≤(S2) O -
230 LD>= (S1)≥(S2) O -
232 AND= (S1)=(S2) O -
233 AND> (S1)>(S2) O -
234 AND< (S1)<(S2) O -
236 AND<> (S1)≠(S2) O -
237 AND<= (S1)≤(S2) O -
238 AND>= (S1)≥(S2) O -
240 OR= (S1)=(S2) O -
241 OR> (S1)>(S2) O -
242 OR< (S1)<(S2) O -
244 OR<> (S1)≠(S2) O -
245 OR<= (S1)≤(S2) O -
246 OR>= (S1)≥(S2) O -
部分功能指令的应用,在程序实例再作详细介绍
第六节 信号控制电梯继电器原理图
目 录
01 信号控制电梯功能简述
02 主回路
03 安全回路
04 楼层控制回路
05 开关门回路
06 轿内指令信号的登记与消除
07 厅外召呼信号的登记与消除
08 电梯的自动定向
09 启动关门、启动运行
10 门锁、检修、抱闸、运行继电器
11 加速与减速延时
12 停站触发与停站回路
13 电梯的运行、加速、减速与平层回路
14 信号显示
15 元件代号一览表
信号控制电梯功能简述
前言
因为现在电梯已大多采用多微机网络控制系统,串行通信、智能化管理、变频调速等技术使电梯的可靠
性与舒适感大大提高,传统的继电器控制系统已退出了历史的舞台。所以许多电梯同行对继电器控制系统已
非常陌生。其实电梯的控制逻辑还是从继电器控制系统逐渐进化而来的。特别是想了解 PLC应用及编程的朋
友,因为 PLC梯形图结构与继电器回路图极为相似,所以这里有必要先从继电器控制系统入手。只有熟悉了
继电器控制电路,才能更好地用 PLC编程。
信号控制电梯功能简述
本系统为有司机操作系统。在轿内操纵箱装有对应层站数的指令按钮。各层厅门外装有一只召唤盒。底
层只有一只向上方向的召唤按钮。顶层也装有一只向下方向的召唤按钮。中间层站各装有两只,分别为向上
和向下召唤按钮。
当厅外有人需要搭乘电梯,就根据目的地要求按下向上或向下召唤按钮,召唤信号就被登记。同时轿内
操纵箱上就有显示某层有召唤请求,并且蜂鸣器鸣叫。司机按照召唤请求需要,按下相应的层站指令按钮。
层站指令被登记并显示。电梯控制系统根据当前轿厢的位置与指令的要求,自动判断出运行方向,并在操纵
箱的方向按钮上显示。
司机根据方向显示,按向上或向下的方向按钮,电梯开始关门,待门全部关好,电梯向上运行,通过压
降起动、加速后进入稳速快车运行。电梯运行过程中,装在厅门外的楼层显示器不断刷新当前轿厢的位置。
当电梯到达目的层时,自动由快车转为慢车,并通过回馈制动使电梯速度逐级下降。电梯到达平层位置停止
运行,制动器抱闸。随即电梯开门,完成了一个电梯运行的过程。
电梯检修状态的运行:电梯操纵箱、轿顶、机房都装有一只检修开关和上行、下行按钮,当处于检修位
时,电梯切断自动定向、快车启动等回路,使电梯只能运行于慢车状态。检修人员只要按下向上或向下按钮,
电梯即慢速上行或下行。但检修有优先级别,即轿顶操作权最优先。
主回路
1、主回路原理图
2、原理说明
(1)电梯开始向上启动运行时,快车接触器 K 吸合,向上方向接触器 S吸合。因为刚启动时接触器 1A 还未吸
合,所以 380V 通过电阻电抗 RQA、XQ接通电动机快车绕阻,使电动机降压起动运行。
(2)约经过 2秒左右延时,接触器 1A吸合,短接电阻电抗,使电动机电压上升到 380V。电梯再经过一个加
速最后达到稳速快车运行状态。
(3)电梯运行到减速点时,上方向接触器 S仍保持吸合,而快车 K 释放,1A 释放,慢车 M吸合。因为此时电
动机仍保持高速运转状态,电机进入发电制动状态。如果慢车绕阻直接以 380V 接入,则制动力矩太强,而使
电梯速度急速下降,舒适感极差。所以必需要分级减速。最先让电源串联电阻电抗,减小慢车线圈对快速运
行电动机的制动力。经过一定时间,接触器 2A吸,短接一部分电阻,使制动力距增加一些。然后再 3A、4A
也分级吸合,使电梯速度逐级过渡到稳速慢车运行状态。
(4)电梯进入平层点,S、M、2A、3A、4A 同时释放,电动机失电,制动器抱闸,使电梯停止运行。
(相关资料:电动机特性曲线变化)
3、动画演示
主回路
1、主回路原理图
2、原理说明
(1)电梯开始向上启动运行时,快车接触器 K 吸合,向上方向接触器 S吸合。因为刚启动时接触器 1A 还未吸
合,所以 380V 通过电阻电抗 RQA、XQ接通电动机快车绕阻,使电动机降压起动运行。
(2)约经过 2秒左右延时,接触器 1A吸合,短接电阻电抗,使电动机电压上升到 380V。电梯再经过一个加
速最后达到稳速快车运行状态。
(3)电梯运行到减速点时,上方向接触器 S仍保持吸合,而快车 K 释放,1A 释放,慢车 M吸合。因为此时电
动机仍保持高速运转状态,电机进入发电制动状态。如果慢车绕阻直接以 380V 接入,则制动力矩太强,而使
电梯速度急速下降,舒适感极差。所以必需要分级减速。最先让电源串联电阻电抗,减小慢车线圈对快速运
行电动机的制动力。经过一定时间,接触器 2A吸,短接一部分电阻,使制动力距增加一些。然后再 3A、4A
也分级吸合,使电梯速度逐级过渡到稳速慢车运行状态。
(4)电梯进入平层点,S、M、2A、3A、4A 同时释放,电动机失电,制动器抱闸,使电梯停止运行。
(相关资料:电动机特性曲线变化)
3、动画演示
安全回路
1、原理图
2、原理说明
由整流器出来的 110V 直流电源,正极接通过熔断丝 1RD 接到 02 号线,负极通过熔断丝 2RD 接到
01号线。
把电梯中所有安全部件的开关串联一起,控制电源继电器 JY,只要安全部件中有任何一只起保护,
将切断 JY 继电器线圈电源,使 JY 释放。
02号线通过 JY继电器的常开点接到 04号线,这样,当电梯正常有电时,04 号与 01 号之间应用
110V 直流电,否则切断 04号线,使后面所有通过 04号控制的继电器失电。
串联一个电阻 RY 是起到一个欠电压保护。大家知道,当继电器线圈得到 110V 电吸合后,如果 110V
电源降低到一定范围,继电器线圈仍能维持吸合。这里,当电梯初始得电时,通过 JY 常闭触点(15、
16)使 JY继电器有 110V 电压吸合,JY 一旦吸合,其常闭触点(15、16)立即数开,让电阻 RY 串入 JY
线圈回路,使 JY 在一个维持电压下吸合。
这样当外部电源出现电压不稳定时,如果 01、02 两端电压降低,JY继电器就先于其它继电器率先
断开,起一个欠电压保护作用。
楼层控制回路
1、原理图
原理说明
在电梯井道内每层都装有一只永磁感应器,分别为 1YG、2YG、3YG、4YG、5YG,而在轿厢侧装有一
块长条的隔磁铁板,假如电梯从 1 楼向上运行,则隔磁铁板依次插入感应器。当隔磁铁板插入感应器时,
该感应器内干簧触点闭合,控制相应的楼层继电器 1JZ~5JZ 吸合。
根据 1JZ~5JZ 的动作,控制 1JZ1~5JZ1 相应的动作。从电路中看出 1JZ1~5JZ1 都有吸合自保持功能,所
以 1JZ1~5JZ1 始终有且只有一只吸合。
动画演示
开关门回路
1、原理图
2、原理说明
(1)正常状态时的关门:当司机输入轿内指令,电梯自动定出方向,司机再按下方向按钮时,关门启动
继电器 1JQ吸合,控制关门继电器 JGM 吸合。控制门机马达向关门方向运转。门完全关闭结束,打断关门
到位限位 3GM,切断 JGM 回路,门停止运行。
(2)检修状态时的关门:电梯处于检修状态时,检修继电器 JM吸合,这里通过接下操纵箱上的关门铵钮
AGM,即可使 JGM吸合。
(3)正常状态时的开门:电梯到站停靠时,状在轿厢上的门区感应器插入该楼层的隔磁铁板,使门区继
电器 JMQ吸合。等电梯完全停止,4JAS↓→JMQ↑→1JQ↓→JYT↓→JGM↓,使开门继电器 JKM吸合。门机
向开门方向旋转,电梯门打开。当门完全开启,切继开门到位限位 2KM,JKM 释放,开门结束。
(3)检修状态时的开门:检修状态时,只有在电梯停止运行时 JTY↓,按下 AKM 可使 JKM 吸合,电梯开
门。
(4)电梯开关门中的减速过程:
开门:当 JKM吸合时,电流一方面通过 DM,另一方面通过开门电阻 RKM,从 M2→M3,使门机向开门
方向旋转,因为此 RKM时电阻值较大,通过 RKM的分流较小。所以开门速度较快。当电梯门关闭到 3/4
行程时,使开关减速限位 1KM 接通,短接了 RKM 的大部分电阻,使通过 RKM的分流增大,从而使电机转速
降低,实现了开门的减速的功能。
关门:当 JGM吸合时,电流一方面通过 DM,另一方面通过关门电阻 RGM,从 M3→M2,使门机向关门
方向旋转。因为此时 RGM 电阻值较大,通过 RGM 的分流较小,所以关门速度较快。当电梯关闭到一半行程
时,使关门一级减速限位 1GM 接通,短接了 RGM 的一部分电阻,使从 RGM的分流增大一些,门机实现一级
减速。电梯门继续关闭到 3/4 行程时,接通二级减速限位 2GM,短接 RGM的大部分电阻,使从 RGM的分流
进一步增加,而电梯门机转速进一步降低,实现了关门的二级减速。
通过调节开关门电路中的总分压电阻 RMD,可以控制开关门的总速度。
因为当 JY吸合时,门机励磁绕阻 DMO一直有电,所以当 JKM或 JGM 释放时,能使电机立即进入能耗
制动,门机立即停转。而且在电梯门关闭时,能提供一个制动力,保证在轿厢内不能轻易扒开电梯门。
(5)基站锁梯时的开关门:
当下班锁梯时,电梯开到基站,基站限位 KT闭合,司机需要关闭轿内安全开关 ZA,切断安全回路,
另一方面使 02号线接至 20号线(见安全回路),这样,司机通过操作基站厅门外的钥匙 YK来控制 JKM
或 JGM 的动作来使电梯开关门。
轿内指令信号的登记与消除
1、原理图
3、原理说明
假如梯在 2楼,司机按下 5楼指令 A5J,则 5 楼指令继电器 J5J 吸合,电梯立即定为上方向(见
自动定向电路),通过 JKS1(17)、J5J(12、6),J5J 自保持,信号被登记。当电梯向上运行到
5 楼 5JZ1 动作,进入减速时,1A释放,通过 5JZ1(11、12),1A(7、8)把 J5J 继电器线圈两端
短路,J5J 释放,实现消号。
电梯停靠在本层时,按本层指令不被接受。
厅外召唤信号的登记与消除
1、原理图
2、原理说明:
假设电梯在一楼,当 3楼有人接向下招唤按钮 A3X时,3 楼向下召唤继电器 J3X 吸合,通过 J3X
(6、12)触点自保持。召唤信号被登记。同时,按下 A3X时控制蜂鸣继电器 JL吸合,轿内蜂鸣器响。
提醒司机有人在召梯。
当 电梯向上运行到 3楼,3JZ1 吸合,这时如果电梯没能继续上行的要求,则 JKS1 释放,通过 3JZ1
(13、14),JKS1(5、11),JQ(5、11)把 J3X 线圈两端短接,实现消号。假如这时电梯仍有上行
信号,即 JKS1 吸合,则 J3X不消号。必需待上行务任完成,返回接应 3楼下向的乘客时,才能消号。
电梯停止在本层时,如没有运行方向,该层召唤不被登记。如果有运行方向,则同向召唤不被登
记,反向召唤能被登记。
自动定向回路、平层继电器
1、原理图
2、原理说明
自动定向:
1JZ1~5JZ1 的状态反映了当前轿厢的实际位置,不管轿厢在何位置,相应的 nJZ1 总是把 A 到 B 这条纵
线分成两段。这样,如果指令信号的楼层大于轿厢位置楼层,则电源只能通过 AB 纵线的上部分而接通
向上方向继电器 JKS、JKS1。反之,如果指令信号的楼层小于轿厢位置楼层,则电源只能通过 AB 纵线
的下部分而接通向下方向继电器 JKX、JKX1。这就是自动定向的原理。
平层、门区继电器:
在轿厢侧面装有 3只永磁感应器,最上面的为上平层继电器 YPS,中间的为门区感应器 YMQ,下面的为
下平层感应器 YPX。
在井道中每层都装有一块隔磁铁板,在平层位置时,这三只感应器应正好全部插入隔磁铁板中。分别
驱动上平层继电器 JPS、下平层继电器 JPX、门区继电器 JMQ。
启动关门、启动运行
1、原理图
2、原理说明
当司机按了楼层指令后,电梯自动定出方向,JKS 或 JKX 动作。这时司机根据方向提示按下向
上方向按钮(AYS)或向下方向按钮(AYX)时,则向上继电器(JFS)或向下继电器(JFX)吸合,
驱动开门启动继电器 1JQ吸合,门开始关闭。
门关闭结束,门锁继电器吸合,通过原来的定向 JKS或 JKX,驱动启动继电器 JQ 吸合,电梯
开始运行快车。
在井道的最高和最低层分别设有一只强迫减速限位 2KW和 1KW。当电梯达到端站减速位置时,
断开强迫减速限位触点,强迫使 JQ释放,电梯停止快车运行而进入慢车状态。
门锁、检修、抱闸线圈、运行继电器回路
1、原理图
2、原理说明
门锁 JMS:
在每道厅门和轿门上都设有门电气联锁触点,只有当全部门关闭好后,所有门电气联锁联点闭合,
门锁继电器 JMS吸合,电梯才能运行。
检修 JM:
在轿内和轿内都装有检修开关,检修开关拨至检修位时,检修继电器 JM 吸合,电梯处于检修状态。
抱闸线圈:DZZ
在下列四种状态下,抱闸线圈得电,制动器打开:
(1)快车上行,即 S↑、K↑。
(2)快车下行,即 X↑,K↑。
(3)慢车上行,即 S↑,M↑。
(4)慢车下行,即 X↑、M↑。
电梯开始运行时,因为 1A、2A 仍未吸合,它们的常闭触点把 RZ1 短路,所以 DZZ得以 110V 直流电
压,电梯启动后经过一段时间延时,1A吸合,使电阻 RZ1串联到 DZZ线圈中,DZZ 两端电压下降至 70V
左右,称为维持电压。电容 C8 的作用是为了 DZZ 从 110V 电压降至维持电压时有一个过渡的过程,防止
DZZ 电压的瞬变而引起误动作。电阻 RZ2 构成 DZZ 的放电回路。
为了防止电梯从快车 K转换到慢车 M时,DZZ 有一个断电的瞬间,所以放入 JK 延时继电器,从而保证
了制动器不会发生两次动作。
运行继电器 JYT:
当电梯上行接触器 S或下行接触器 X吸合时,运行继电器 JYT吸合,表示电梯在运行之中。
加速与减速延时继电器
1、原理图
2、原理说明:
当司机按下方向按钮启动关门时,通过 JYT、1JQ,使 J1SA 吸合,则时通过 R1SA 给电容 C1SA 充电,
当电梯开始运行时,JYT↓,J1SA 并未立即释放,C1SA 通过 R1SA 对 J1SA 放电,使 J1SA 仍吸合一段时
间,所以 J1SA 是延时释放继电器。当 J1SA 释放时,一级加速接触器 1A 吸合,电梯经过降压启动到一
级加速后进入稳速快车状态(参看运行回路)。
电梯在快车运行状态时,J2SA、J3SA、J4SA 都处于吸合状态,一旦转入慢车,M↑→J2SA 延时释
放→2A↑→J3SA 延时释放→3A↑→J4SA 延时释放→4A↑,形成 1级、2 级、3级减速。
在快车转慢车时,JK 也延时延放。
?
停站触发与停站回路
1、原理图
2、原理说明
假如电梯从 1楼驶往 4楼。J4J 吸合。
电梯向上行驶,当隔磁铁板插入 4 楼感应器中时,4JZ 吸合,停站触发继电器 JTQ延时释放。
通过 J4J、4JZ、JTQ 延时断开触点(1、7),接通停站继电器 JT,电梯进入减速停站。
停站触发继电器 JTQ的延时时间最好在 0.1秒以下,它的作用是为了保证电梯到达某楼层后,
不再响应该楼层发出的停车指令。比如你在电梯在开往四楼中,途经 3楼时再输入 3楼指令,电
梯将只记忆该 3楼指令,而不应答停车。如果 JTQ的延时时间过长,则有可能答应这个停车指令,
而此时减速距离已不够,会引起冲层的现象。
运行、减速、平层
1、原理图
2、原理说明
快车上行:JQ吸合,使快车接触器 K 吸合,(回路 1)快车延时继电器 JK吸合,通过已定的方
向 JKS,使向上运行接触器 S 吸合,因为此时 1A 仍未吸合,所以电梯快车降压启动,经过延时,1A
吸合,电梯加速,最后达到快车稳速向上运行。
减速:运行到目的层时,JQ 释放,K释放,M 吸合。在 K 释放后,S通过(回路 2)JK(3、8)
--S(1、2)--X(3、4)继续保持吸合,电梯以慢车向上运行,并通过 2A、3A、4A的逐级吸合,进
行三级减速制动,最后进入慢车稳速运行。
当 JK释放后,S 通过(回路 3)JM(13、14)--JMQ(2、8)--M(1、2)--S(1、2)继续自保。
平层:电梯继续慢速上行,上平层感应器率先插入楼层隔磁铁板,这时 S 可以通过(回路 4)JPS
(3、8)--JQ(2、8)--JPX(2、8),K(3、4)--JM(13、14)吸合,电梯再上升到门区感应器
插入时,回路 3断开,S 只通过回路 4 吸合,当下平层感应器插入时,电梯正好平层,回路 4 断开,
S 释放,M释放,电梯停止运行。
运行、减速、平层
1、原理图
2、原理说明
快车上行:JQ吸合,使快车接触器 K 吸合,(回路 1)快车延时继电器 JK吸合,通过已定的方
向 JKS,使向上运行接触器 S 吸合,因为此时 1A 仍未吸合,所以电梯快车降压启动,经过延时,1A
吸合,电梯加速,最后达到快车稳速向上运行。
减速:运行到目的层时,JQ 释放,K释放,M 吸合。在 K 释放后,S通过(回路 2)JK(3、8)
--S(1、2)--X(3、4)继续保持吸合,电梯以慢车向上运行,并通过 2A、3A、4A的逐级吸合,进
行三级减速制动,最后进入慢车稳速运行。
当 JK释放后,S 通过(回路 3)JM(13、14)--JMQ(2、8)--M(1、2)--S(1、2)继续自保。
平层:电梯继续慢速上行,上平层感应器率先插入楼层隔磁铁板,这时 S 可以通过(回路 4)JPS
(3、8)--JQ(2、8)--JPX(2、8),K(3、4)--JM(13、14)吸合,电梯再上升到门区感应器
插入时,回路 3断开,S 只通过回路 4 吸合,当下平层感应器插入时,电梯正好平层,回路 4 断开,
S 释放,M释放,电梯停止运行。
显示回路
一、楼层及方向显示原理图
二、指令及召唤信号显示
?
元件代号一览表
按
钮
A1J--A5J 1-5 楼指令按钮
A1S-A4S 1-4 楼上召唤按钮
A2X-A5X 2-5 楼下召唤按钮
AKM 开门按钮
AGM 关门按钮
AYS 轿内向上按钮
AYX 轿内向下按钮
ADS 轿顶向上按钮
ADX 轿顶向下按钮
感
应
器
1YG-4YG 1-4 楼层楼感应器
YPS 上平层感应器
YPX 下平层感应器
YMQ 门区感应器
继
电
器
J1J-J5J 1-5 楼指令继电器
J1S-J4S 1-4 楼上召唤继电器
J2X-J5X 2-5 楼下召唤继电器
1JZ-5JZ 1-5 楼层楼继电器
1JZ1-5JZ1 1-5 楼层楼控制继电器
JKM 开门继电器
JGM 关门继电器
1JQ 关门启动继电器
JQ 启动运行继电器
JKS 上方向继电器
JKS1 上方向辅助继电器
JKX 下方向继电器
JKX1 下方向辅助继电器
JFS 向上继电器
JFX 向下继电器
JMS 门锁继电器
JY 电压继电器
JM 检修继电器
JYT 运行继电器
JTQ 停站触发继电器
JT 停站继电器
J1SA 一级加速延时继电器
J2SA 一级减速延时继电器
J3SA 二级减速延时继电器
J4SA 三级减速延时继电器
JK 快车延时继电器
JL 蜂鸣器继电器
JPS 上平层继电器
JPX 下平层继电器
JXW 相序继电器
1RT 快车热继电器
2RT 慢车热继电器
JMQ 门区继电器
接
触
器
S 上行接触器
X 下行接触器
K 快车接触器
M 慢车接触器
1A 快车一级加速接触器
2A 慢车一级减速接触器
3A 慢画二级减速接触器
4A 慢车三级减速接触器
DZZ 抱闸线圈
DMO 门机定子
DM 门机转子
限
位
1KW 向下强迫减速限位
2KW 向上强迫减速限位
3KW 下终端限位
4KW 上终端限位
KMJ1 快车限位
3GM 关门终端限位
2KM 开门终端限位
1GM 关门一级减速限位
2GM 关门二级减速限位
1KM 开关一级减速限位
KT 基站限位
开
关
ZA 安全开关
ZT 急停开关
KQ 安全窗开关
KXZ 地坑断绳开关
Z1 轿顶检修开关
ZM 轿内检修开关
YK 基站厅开钥匙开关
门锁
KMJ 轿门门电气联锁
1KMT-5KMT 1-5 楼厅门电气联锁
电
阻
RY 电压继电器分压电阻
RZ1 抱闸分压电阻
RZ2 抱闸放电电阻
RMD 门机总速度调整电阻
RKM 开门减速调整电阻
RGM 关门减速调整电阻
R1SA 一级加速延时调整电阻
R2SA 一级减速延时调整电阻
R3SA 二级减速延时调整电阻
R4SA 三级减速延时调整电阻
RTQ 停站触发延时调整电阻
RT 停站继电器延时调整电阻
RK 快车延时调整电阻
R1J-R5J 1-5 楼指信消号电阻
R1S-R4S 1-4 楼上召消号电阻
R2X-R5X 2-5 楼下召消号电阻
电
容
C8 制动器电容
C1SA 一级加速延时电容
C2SA 一级减速延时电容
C3SA 二级减速延时电容
C4SA 三级减速延时电容
CK 快车延时电容
CTQ 停站触发延时电容
CT 停站继电器延时电容
?
集选控制电梯继电器原理
1 集选控制电梯功能要求
2 一则集选电梯继电器原理图
第 1页
第 2 页
?
第 3 页
?
第 4 页
第 5 页
第 6 页
第 7 页
第 8 页
第 9 页
返回
第 10页
第 11页
第 12页
?
第八节 信号控制双速电梯 PLC程序
1、编制 PLC 程序的步骤
2、确定 I/O接口点数及 PLC选型
3、绘制电路原理图和安装接线图
4、编制 PLC梯形图
(1)楼层控制回路
(2)指令、召唤信号的登记与消除
(3)自动定向回路
(4)启动关门与启动
(5)开关门回路
(6)基站锁梯
(7)上行、下行接触器,运行继电器
(8)停站触发与停站
(9)快车、慢车接触器,JK 继电器
(10)1A、2A、3A、4A 接触器
(11)蜂鸣器、结束
源程序下载
编制 PLC电梯程序的步骤
1 系统设计
根据确定电梯的拖动和控制方式及其它特殊要求,根据所在单位和个人条件,计算 I/O点
数和选择 PC机的规格型号,并设计绘制电路原理图和安装接线图。
2 设计 PLC 梯形图程序
采用 PLC作为中间过程控制的电梯电气控制,在电路原理图和安装接线图设计绘制完成后,
还必须设计绘制与电路原理图对应的 PLC梯形图程序,梯形图程序是 PLC内各种软硬继电器的
逻辑控制图,它的逻辑控制方式类似于中间过程控制继电器之间的逻辑控制电路图,因此它是
PLC 控制电气系统设计工作的重要环节之一。设计梯形图程序时,应接 PLC 使用手册的方法,
了解 PLC的 I/O 接口分配、组合排列和代号,机内各种软继电器、数据区、通道代号,常用指
令的编制规则和代号等。
设计梯形图一般应遵守以下规则:
(1)I/O 点和内部各种软继电器等的常开和常闭触点可多次重复使用。
(2)软继电器的线圈不能与左边的母线直接连接,应有过渡点。
(3)软继电器的右边不能再有接点。
(4)在一套梯形图中,相同代号的线圈不能重复出现。(用 SET、RST 指令外)
(5)PLC 的输入输出点可当软继电器来使用。
3、灌输程序
梯形图编制好后,必须灌输到 PLC的存储器中方可运行。现在大家都有电脑,我们可以用
编程软件把梯形图编好,用专用的电缆把电脑与 PLC连接后,就可把程序写到 PLC中去了。
4、模拟运行
程序灌入 PLC中之后,先要进行模拟运行。方法可用搭接线的办法模拟输入端的各种状态,
观看输出信号是否达到设计要求。
编程软件介绍
我们采用三菱 FX系列的 PLC,可以使用三菱 FX 系列 PLC 专用编程软件 FxGP/WIN 来编程。
该软件可以采用三种方式来编程:(1)输入指令方式 (2)画梯形图方式 (3)SFC 编程方
式。利用一根专用电缆 SC-09 可以与 PLC 通信,达到灌输或读出程序的目的。而且可以在线监
控运行中的 PLC,观察 PLC 内部各种软继电器的动作状态,使用十分方便。
确定 I/O 接口点数、PLC选型
现在我们以编制一台 3门 3站的信号控制双速电梯为例,先根据控制要求计算所需要的 I/O
接口点数。
1、输入接口:
(1)安全回路
2、输出接口
(1)上行接触器
(2)门锁
(3)检修开关
(4)上平层感应器
(5)下平层感应器
(6)向上按钮
(7)向下按钮
(8)关门按钮
(9)开门按钮
(10)上强迫减速限位
(11)下强迫减速限位
(12)消号按钮
(13)锁梯钥匙
(14)一楼楼层感应器
(15)二楼楼层感应器
(16)三楼楼层感应器
(17)一楼指令按钮
(18)二楼指令按钮
(19)三楼指令按钮
(20)一楼向上召唤按钮
(21)二楼向上召唤按钮
(22)二楼向下召唤按钮
(23)三楼向下召唤按钮
(2)下行接触器
(3)快车接触器
(4)慢车接触器
(5)一级加速接触器
(6)一级减速接触器
(7)二级减速接触器
(8)三级减速接触器
以上为一组:选用交流 220V 电压的接触器
(9)开门继电器
(10)关门继电器
(11)JK继电器
(12)蜂鸣器
(13)向上方向显示
(14)向下方向显示
(15)一楼楼层显示
(16)二楼楼层显示
(17)三楼楼层显示
(18)一楼指令显示
(19)二楼指令显示
(20)三楼指令显示
(21)一楼上召唤显示
(22)二楼上召唤显示
(23)二楼下召唤显示
(24)三楼下召唤显示
以上合并为一组,选用交流 24V 电压电源
根据计算,输入共 23 点,输出共 24 点,我们可以选用 FX2n-48MR 的 PLC 来编制程序(输入
输出各 24点)。
绘制原理图及 PLC安装接线图
一、主回路
二、安全回路、门锁回路、制动器、门机回路
三、PLC 接线图(输入回路)
三、PLC 接线图(输出回路)
图中线号与继电(接触)器触点号可根据实际情况自定义,这里不再画出。另电源部分与照明部分
也未画出。(实在是画累了哦 ^-^ )
楼层控制回路
指令、召唤信号的登记与消除
自动定向回路
启动关门与启动
开关门继电器
基站锁梯
上行、下行接触器,运行继电器
停站触发与停站
快车、慢车接触器,JK继电器
1A、2A、3A、4A 接触器
蜂鸣器、结束
用上行和下行换速开关来进行楼层翻转的原理
作者:增清
在传统的电梯电路中,通常是用楼层感应器的信号来进行楼层的翻转。这样井道中每个楼层至少要装
一个感应器,占用 PLC的输入点数多。由于 PLC 的编程功能十分丰富,所以可以采取利用上行换速和下行
换速信号来进行楼层的翻转,这样只需要在轿厢侧装两只感应器,便可实现电梯楼层的翻转及减速信号的
发出,既给安装带来方便又节约了成本。
PLC 编程梯形图如下所示(四层电梯为例)
1、当电梯上行时,每当上换速感应器插入隔磁板时,使 M0有一个周期的触发。
2、M0 吸合一下,使寄存器 D200 内数值增 1。
3、当电梯下行时,每当下换速感应器插入隔磁板时,使 M1有一个周期的触发。
4、M1 吸合一下,使寄存器 D200 内的数值减 1。
5、当电梯下行到最低层,下强迫开关动作时,使 D200 内的数值强制为 1。
6、当电梯上行到最高层,上强迫开关动作时,使 D200 内的数值强制为 4。(这里以 4 层为例)
这样,D200 内的实际数值就反映了电梯的实际楼层数值,对 D200 进行解码,得出 M501 吸合时为 1 楼,
M502 吸合时为 2 楼,M503 吸合时为 3楼,M504 吸合时为 4 楼。同时,电梯进行楼层翻转时也给出了电梯
的减速信号。