
- 355.00 KB
- 2021-05-13 发布


- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
二、选择题
1. 用极微弱的可见光做双缝干涉实验,随着时间的增加,在胶片上先后出现如图 甲、乙、丙所示的图象,则下列说法错误的是( )
A. 图象甲表明光具有粒子性
B. 实验表明光是一种概率波
C. 用紫外线光做实验,观察不到类似的图象
D. 实验表明光的波动性不是光子间相互作用引起的
【答案】C
【解析】A、图象甲以一个个的亮点,即每次只照亮一个位置,这表明光是一份一份传播的,说明光具有粒子性,故A正确;
B、因为单个光子所能到达的位置不能确定,但大量光子却表现出波动性,即光子到达哪个位置是一个概率问题,故此实验表明了光是一种概率波,故B正确;
C、因为紫外光是不可见光,所以直接用眼睛观察不到类似的图象,但是用感光胶片就能观察到类似现象,故C错误;
D、在光的双缝干涉实验中,减小光的强度,让光子通过双缝后,光子只能一个接一个地到达光屏,经过足够长时间,仍然发现相同的干涉条纹.这表明光的波动性不是由光子之间的相互作用引起的,故D正确;
说法错误的故选C。
2. 如图所示,一个质量为1kg的遥控小车正以18m/s的速度,沿水平直线轨道做匀速直线运动,在t=0时刻开始制动做匀减速直线运动,在3s内前进了36m。在这3s内( )
A. 小车运动的平均速度大小为9m/s
B. 小车受到的制动力大小为6N
C. 制动力对小车做负功,大小等于162J
D. 制动力对小车做功的平均功率为48W
【答案】D
【解析】A、小车运动的平均速度大小为,故A错误;
C、制动力对小车做负功,大小等于,故C错误;
D、制动力对小车做功的平均功率为,故D正确;
故选D。
3. 如图所示,理想变压器原线圈a、b间输入一恒定的正弦交流电,副线圈接有理想的电压表V和电流表A,当滑线变阻器的滑片P向下滑动时,下列说法正确的是( )
A. 电压表的示数不变
B. 电压表的示数增大
C. 电流表的示数增大
D. 电阻R2的功率增大
【答案】B
【解析】设电流表的示数为I,理想变压器原副线圈匝数之比为k,则副线圈的电流为,理想变压器副线圈的电压为,理想变压器原线圈的电压为,理想变压器原副线圈电压之比为,解得,当滑线变阻器的滑片P向下滑动时,电阻R增大,电流表的示数为I减小,理想变压器原线圈的电压为增大,理想变压器副线圈的电压增大,故电压表的示数增大,电阻R2的功率减小,故B正确,A、C、D错误;
故选B。
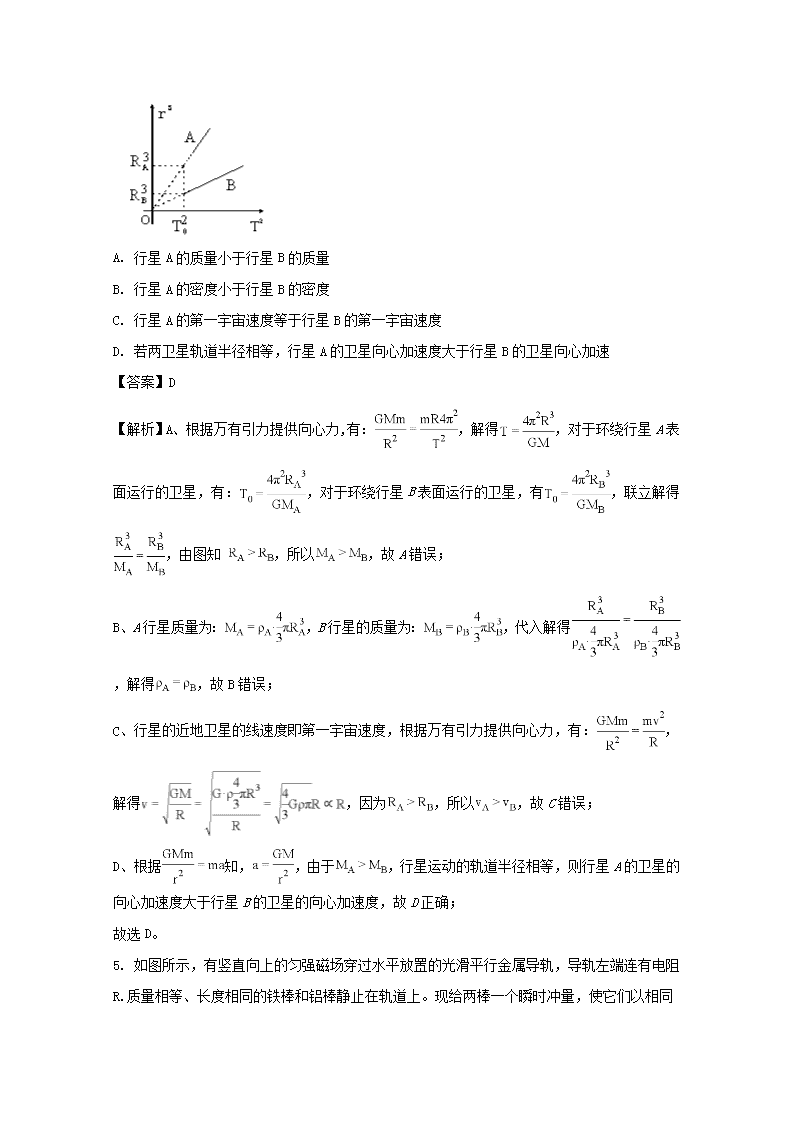
4. 宇宙中有两颗相距很远的行星A和B,它们的半径分别为RA和RB。两颗行星周围卫星的轨道半径的三次方(r3)与运行周期的平方(T2)的关系如图所示;T0为两颗行星近地卫星的周期。则( )
A. 行星A的质量小于行星B的质量
B. 行星A的密度小于行星B的密度
C. 行星A的第一宇宙速度等于行星B的第一宇宙速度
D. 若两卫星轨道半径相等,行星A的卫星向心加速度大于行星B的卫星向心加速
【答案】D
【解析】A、根据万有引力提供向心力,有:,解得,对于环绕行星A表面运行的卫星,有:,对于环绕行星B表面运行的卫星,有,联立解得,由图知 ,所以,故A错误;
B、A行星质量为:,B行星的质量为:,代入解得,解得,故B错误;
C、行星的近地卫星的线速度即第一宇宙速度,根据万有引力提供向心力,有:,解得,因为,所以,故C错误;
D、根据知,,由于,行星运动的轨道半径相等,则行星A的卫星的向心加速度大于行星B的卫星的向心加速度,故D正确;
故选D。
5.
如图所示,有竖直向上的匀强磁场穿过水平放置的光滑平行金属导轨,导轨左端连有电阻R.质量相等、长度相同的铁棒和铝棒静止在轨道上。现给两棒一个瞬时冲量,使它们以相同速度v0 向右运动,两棒滑行一段距离后静止,已知导棒始终与导轨垂直,在此过程中( )
A. 在速度为u0时,两棒的端电压Uab=Ucd
B. 铁棒在中间时刻的加速度是速度为v0时加速度的一半
C. 铝棒运动的时间小于铁棒运动的时间
D. 两回路中磁通量的改变量相等
【答案】C
【解析】A、导体棒的速度为,根据法拉第电磁感应定律,导体棒中感应电动势为,由闭合电路欧姆定律知回路中电流为,而电阻R两端电压为,由于铁棒和铝棒的电阻r不同,故两棒的端电压,故A错误;
B、根据牛顿第二定律可知,铁棒做加速度减小的减速运动,铁棒在中间时刻的速度小于,铁棒在中间时刻的加速度小于速度为v0时加速度的一半,故B错误;
C、由于铝棒的电阻小于铁棒的电阻,根据可知铝棒受到的平均安培力大于铁棒受到的平均安培力,根据动量定理可知铝棒运动的时间小于铁棒运动的时间,故C正确;
D、根据动量定理可知,而,解得,两回路中磁通量的改变量不相等,故D错误;
故选C。
6. 空间存两点电荷产生的静电场,在xoy横轴上沿x轴正方向电场强度E随x变化的关系如图所示,图线关于坐标原点对称,虚线为两条渐近线,M、N是两条渐近线到原点O的中点,且|PO|=3|MO|。取无穷远处电势为零,下列说法中正确的是( )
A. M、N两点的电势相等
B. P点电势高于M点电势
C. M、O两点电场强度大小之比为20:9
D. 单位正电荷从O点移到N点过程中,电场力做功为W,则N点电势数值为-W
【答案】BCD
【解析】AB、由图可知MN之间的电场线方向沿x轴正方向,故左边的电荷为正电荷,右边为等量的负电荷,故M点的电势比N两点电势高,P点电势高于M点电势,故A错误,B正确;
C、设MO的距离为r,正负电荷的电荷量为Q,M点电场强度大小为,O点电场强度大小为,M、O两点电场强度大小之比为,故C正确;
D、沿电场线方向电势降低,O点电势为零,所以单位正电荷从O点移到N点过程中,电场力做功为W,则N点电势数值为-W,故D正确;
故选BCD。
【点睛】根据MN之间的电场线方向沿x轴正方向,确定左边的电荷为正电荷,右边为的负电荷,根据图线关于坐标原点对称,确定两点荷为等量异种电荷。
7. 如图所示,在竖直平面内,一根不可伸长的轻质软绳两端打结系于“ V”型杆上的A、B两点,已知OM边竖直,且|AO|=|OB|,细绳绕过光滑的滑轮,重物悬挂于滑轮下处于静止状态。若在纸面内绕端点O按顺时针方向缓慢转动“V”型杆,直到ON边竖直,绳子的张力为T,A点处绳子与杆之间摩擦力大小为F,则( )
A. 张力T先一直增大
B. 张力T先增大后减小
C. 摩擦力F一直减小
D. 摩擦力F先增大后减小
【答案】BC
【解析】AB、设滑轮两侧绳子与竖直方向的夹角为α,受力如图
在纸面内绕端点O按顺时针方向缓慢转动“V”型杆,直到ON边竖直,AB的长度不变,AB在水平方向的投影先变长后变短,绳子与竖直方向的夹角为α先变大后变小,所以张力先增大后减小,故A错误,B正确;
CD、以A点为对象,受力分析如图
根据平衡条件可知,,在纸面内绕端点O按顺时针方向缓慢转动“V”型杆,绳子与竖直方向的夹角α先变大后变小,OA杆与竖直方向的夹角一直变大,当绳子与竖直方向的夹角α变大,摩擦力减小,当绳子与竖直方向的夹角α变小时,但还是在增大,所以摩擦力还是在减小,故C正确,D错误;
故选BC。
【点睛】设滑轮两侧绳子与竖直方向的夹角为α,在纸面内绕端点O按顺时针方向缓慢转动“V”型杆,根据几何关系和对称性,绳子与竖直方向的夹角α先变大后变小。
8. 水平长直轨道上紧靠放置n个质量为m可看作质点的物块,物块间用长为L的不可伸长的细线连接,开始处于静止状态,物块与轨道间动摩擦因数为μ.用水平恒力F拉动物块1开始运动,到连接第n个物块的线刚好拉直时整体速度正好为零,则( )
A. 拉力F所做功为nFL B. 系统克服摩擦力做功为
C. D.
【答案】BC
【解析】物体1的位移为(n-1)l,则拉力F所做功为 WF=F•(n-1)l=(n-1)Fl.故A错误.系统克服摩擦力做功为 Wf=μmgl+μmg•l+…+μmg•(n-2)l+μmg•(n-1)l= .故B正确.据题,连接第n个物块的线刚好拉直时整体速度正好为零,假设没有动能损失,由动能定理有 WF=Wf,解得 .现由于绳子绷紧瞬间系统有动能损失,所以根据功能关系可知 ,故C正确,D错误.故选BC.
三、非选择题:
(一)必考题:
9. 某同学利用如图所示探究“机械能守恒定律”.实验步骤如下:
(1)用游标卡尺测出挡光片的宽度d;
(2)按图竖直悬挂好轻质弹簧,将轻质遮光条水平固定在弹簧下端;在铁架台上固定一位置指针,标示出弹簧不挂钩码时遮光条下边缘的位置,并测出此时弹簧长度x0;
(3)测量出钩码质量m,用轻质细线在弹簧下方挂上钩码,测量出平衡时弹簧的长度x1,并按图所示将光电门组的中心线调至与遮光条下边缘同一高度,已知当地重力加速度为g,则此弹簧的劲度系数k =_______;
(4)用手缓慢地将钩码向上托起,直至遮光条恰好回到弹簧原长标记指针的等高处(保持细线竖直),迅速释放钩码使其无初速下落,光电门组记下遮光条经过的时间Dt,则此时重锤下落的速度=________;
(5)弹簧的弹性势能增加量__________,(用题目所给字母符号表示);
(6)钩码减小的机械能∆E=________; (用题目所给字母符号表示)
(7)若∆EP与∆E近似相等时,说明系统的机械能守恒。
【答案】 (1). (2). (3). (4).
解:(1)根据平衡条件可得,解得此弹簧的劲度系数;
(2)在很短时间内,根据平均速度等于瞬时速度,此时重锤下落的速度;
(3)弹簧的弹性势能增加量
该过程中重力势能的减小量,动能的增加量为,故钩码减小的机械能
10. 霍尔元件是一种重要的磁传感器,常应用在与磁场有关的自动化控制和测量系统中。如图甲所示,在一矩形半导体薄片的1、2间通入电流I,同时外加与薄片垂直的磁场B,当霍尔电压UH达到稳定值后,UH的大小与I和B以及霍尔元件厚度d之间满足关系式 ,其中比例系数RH称为霍尔系数,仅与材料性质有关。
(1)若半导体材料是电子导电,霍尔元件能通过如图甲所示电流I,接线端3的电势比接线端4的电势____(填“高”或 “低”);
(2)已知的厚度为d,宽度为b,电流的大小为I,磁感应强度大小为B,电子电量为e,单位体积内电子的个数为n,测量相应的UH值,则霍尔系数RH=______;
(3)图乙是霍尔测速仪的示意图,将非磁性圆盘固定在转轴上,圆盘的周边等距离地嵌装着m个永磁体,相邻永磁体的极性相反。霍尔元件置于被测圆盘的边缘附近。当圆盘匀速转动时,霍尔元件输出的电压脉冲信号图像如图丙所示。若在时间t内,霍尔元件输出的脉冲数目为P,请导出圆盘转速N的表达式______;
(4)如图丁是测速仪的外围电路图,要将图甲中的霍尔元件正确的接入电路中虚线框中四个接线端,则a和b分别连接_______和______(填接线端“1和2”或“3和4”)。
【答案】 (1). (1)低; (2). (2) (3). (3) (4). (4)1 (5). 2
【解析】【分析】由左手定则可判断出电子的运动方向,从而判断接线端3和接线端4的电荷聚集情况,聚集正电荷的一侧电势高;根据题中所给的霍尔电势差和霍尔系数的关系,结合电场力与洛伦兹力的平衡,可求出霍尔系数的表达式;由转速时间以及圆盘的周边永久磁体的个数,可表示出霍尔元件输出的脉冲数目,从而表示出圆盘转速;
解:(1)导体或半导体中的电子定向移动形成电流,由左手定则判断,电子会偏向接线端3,使其电势低,同时相对的接线端4的电势高,故接线端3的电势比接线端4的电势低;
(2)由题意得:,解得;
当电场力与洛伦兹力平衡时,有,解得,又有电流的微观表达式:I=nevS,联立解得;
(3) 由于在时间t内,霍尔元件输出的脉冲数目为P,则有:,圆盘转速为:;
(4) 要将图甲中的霍尔元件正确的接入电路中虚线框中四个接线端,则a和b分别连接线端“1和2”。
11. 如图所示,半径r=0.06m的半圆形无场区的圆心在坐标原点O处,半径R=0.1m,磁感应强度B=0.075T的圆形有界磁场区的圆心坐标为O1(0,0.08m),平行金属板的板长L=0.3m,间距d=0.1m,极板间所加电压U=6.4×102V,其中MN极板上收集的粒子全部中和吸收。一位于O处的粒子源向第I、II象限均匀地发射速度大小u=6.0×105m/s的带正电粒子,经圆形磁场偏转后,从第I象限出射的粒子速度方向均沿x轴正方向,若粒子重力不计、比荷 不计粒子间的相互作用力及电场的边缘效应,sin37°=0.6,cos37°=0.8。求:
(1)打到下极板右端点N的粒子进入电场时的纵坐标值;
(2)打到N点粒子进入磁场时与x轴正方向的夹角。
【答案】(1)0.08m(2)530
【解析】【分析】粒子在电场中做内平抛运动,根据运动的合成与分解求出打到下极板右端点N的粒子进入电场时的纵坐标值;粒子在磁场中做圆周运动,根据洛伦兹力提供向心力和几何关系求出进入磁场时与x轴正方向的夹角;
解析:(1)如图所示,
恰能从下极板右端射出的粒子的竖直坐标为y,
粒子在电场中的加速度
粒子穿过平行金属板的时间为
粒子在竖直方向做初速度为零的匀加速直线运动,
有:
联立三式得:
代入数据得y=0.08m
y
相关文档
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看