

- 788.89 KB
- 2021-11-10 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
南通市 2020 年中考物理试题及答案
1.“遥知不是雪,为有暗香来”诗人能远远感知是梅不是雪,是因为闻到梅花香味,
“暗香来”说明
A.分子间有空隙 B.分子间有引力 C.分子间有斥力 D.分子是运动的
2.如图,用湿手摩擦杯口发声,若改变杯内水量可以改变声音的( )
A.响度 B.音调 C.音色 D.速度
3.行驶的汽车内,某时刻座位上的乘客突然向汽车行驶方向前倾,说明汽车正在
A.直行急刹车 B.直行急加速
C.向左急转弯 D.向右急转弯
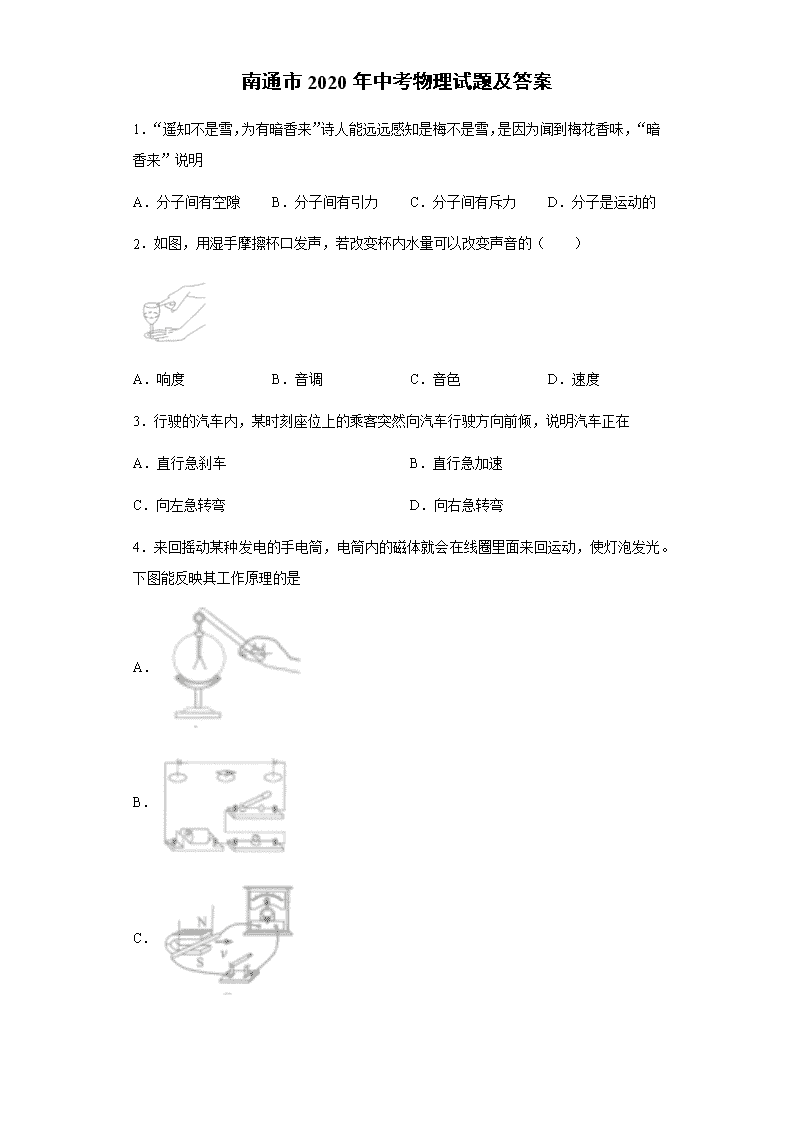
4.来回摇动某种发电的手电筒,电筒内的磁体就会在线圈里面来回运动,使灯泡发光。
下图能反映其工作原理的是
A.
B.
C.
D.
5.下列厨房用品的工作原理与物理知识相对应的是
A.电冰箱——液态制冷剂升华吸热 B.油烟机——流体的流速越大压强越小
C.微波炉——次声波能够加热食品 D.高压锅——沸点随气压的増大而降低
6.在“探究凸透镜成像的规律”的实验中,光屏上得到一个倒立、等大的实像,若想再
模拟照相机的成像原理,应将
A.蜡烛和光屏都远离透镜 B.蜡烛和光屏都靠近透镜
C.蜡烛远离透镜且光屏靠近透镜 D.蜡烛靠近透镜且光屏远离透镜
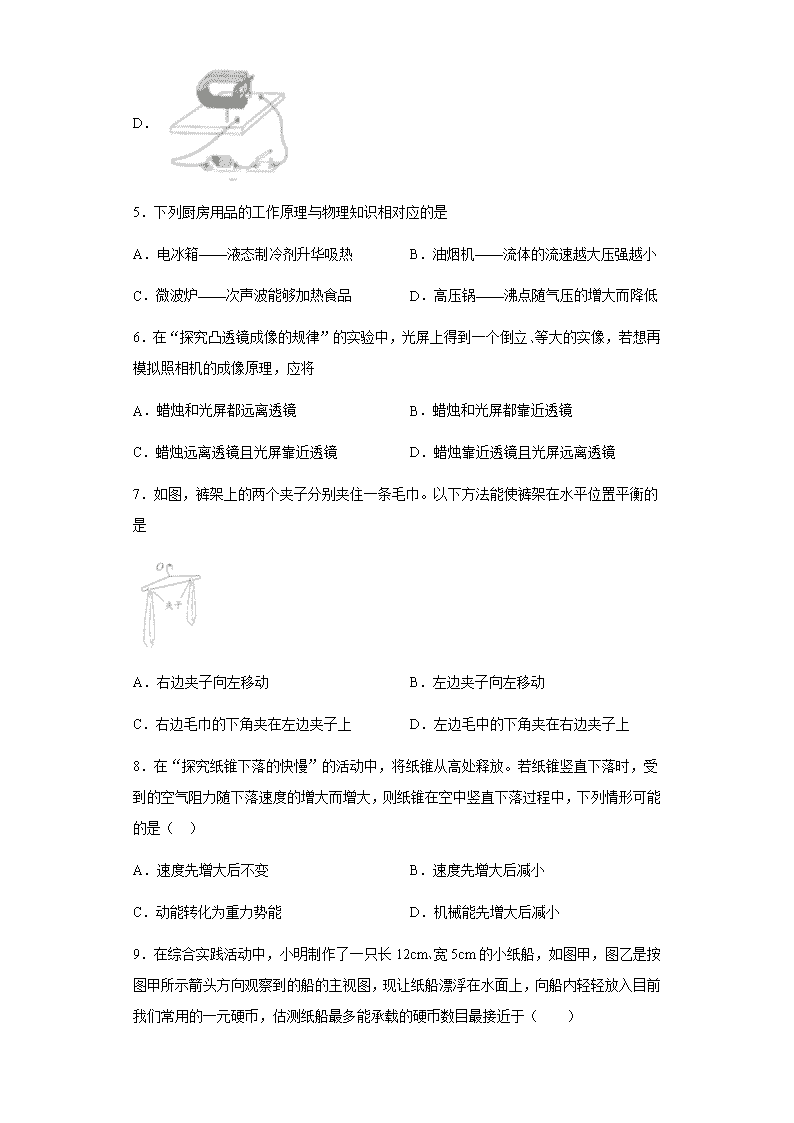
7.如图,裤架上的两个夹子分别夹住一条毛巾。以下方法能使裤架在水平位置平衡的
是
A.右边夹子向左移动 B.左边夹子向左移动
C.右边毛巾的下角夹在左边夹子上 D.左边毛中的下角夹在右边夹子上
8.在“探究纸锥下落的快慢”的活动中,将纸锥从高处释放。若纸锥竖直下落时,受
到的空气阻力随下落速度的増大而增大,则纸锥在空中竖直下落过程中,下列情形可能
的是( )
A.速度先增大后不变 B.速度先增大后减小
C.动能转化为重力势能 D.机械能先増大后减小
9.在综合实践活动中,小明制作了一只长 12cm、宽 5cm的小纸船,如图甲,图乙是按
图甲所示箭头方向观察到的船的主视图,现让纸船漂浮在水面上,向船内轻轻放入目前
我们常用的一元硬币,估测纸船最多能承载的硬币数目最接近于( )
A.15枚 B.35枚 C.55枚 D.75枚
10.图甲为天然气泄漏检测电路原理图。电源电压恒定,R0为定值电阻,气敏传感器两
端电压 UQ随天然气浓度 C变化的关系如图乙。则下列描述 R0的功率 P0、电路的总功率
P随天然气浓度 C变化的关系图线中,可能正确的是( )
A. B.
C. D.
11.南通啬园隧道侧壁采用新型装饰材料,即便用强光照射也不觉得刺眼,是因为光在
墙面上发生_____反射,隧道前有一段斜坡比较粗糙,是为了____摩擦,汽车驶入斜坡
时要刹车,刹车片温度会升高,这是通过_____方式增加了内能。
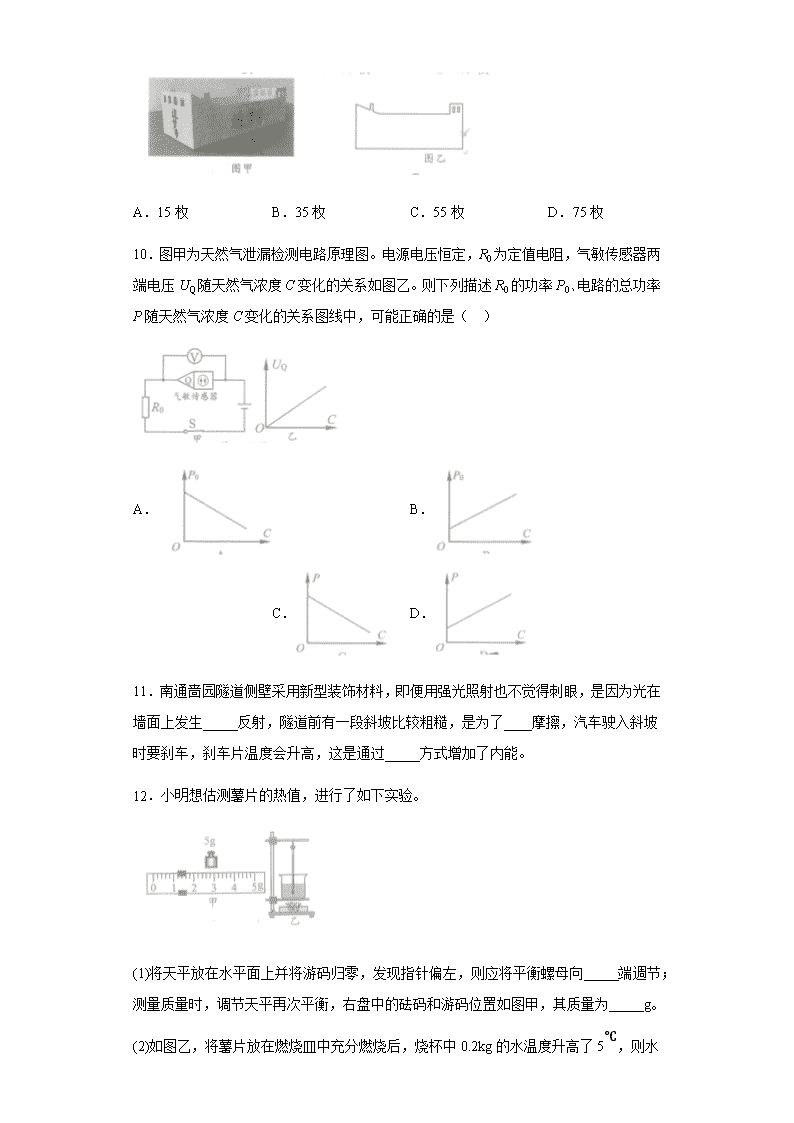
12.小明想估测薯片的热值,进行了如下实验。
(1)将天平放在水平面上并将游码归零,发现指针偏左,则应将平衡螺母向_____端週节;
测量质量时,调节天平再次平衡,右盘中的砝码和游码位置如图甲,其质量为_____g。
(2)如图乙,将薯片放在燃烧皿中充分燃烧后,烧杯中 0.2kg的水温度升高了 5℃,则水
吸收的热量 Q 吸=_____J。[c 水=4.2×103J/(kg・℃)]
(3)根据 Q 放=Q 吸和 Q 放=mq,算出薯片的热值比实际值小得多,原因是∶_____。
13.5月 5日,我国“长征五号 B”大型运載火箭首飞成功,火箭使用液态氢作为燃料,
氢能 _____(选填“是”或“不是”)清洁能源。火箭向下喷射燃气获得推力加速升空,
说明力的作用是_____的,此过程中火箭受到_____(选填“平衡”或“非平衡”)力作
用,搭载的试验飞船的动能将_____。
14.洗发后,小丽站在镜前使用电吹风吹头发。
(1)她发现镜面起雾,雾的形成是_____现象,该过程要_____热量,擦干镜子后,小丽看
到镜子中自己等大的_____像。
(2)电吹风简化电路如图,旋转扇形开关 S,实现断开、冷风热风的转换,已知吹冷风时
的功率为 100W,R=48.4Ω,若家中只有电吹风工作,她用冷风、热风挡交替使用 5mim,
标有“1200imp/kW・h”的电能表指示灯闪烁 90次,则电吹风消耗_____J的电能,使用
热风挡的时间为_____ min。
15.小明想测量校园里一块长方体校训石对水平地面的压强。他找到一些与其材质相同
的小石块,用测力计、烧杯、水、细线和卷尺等进行如下实验:(g取 10N/kg)
(1)使用弹簧测力计前,应检查指针是否指在____;
(2)由图示操作,测出小石块受到的浮力 F 浮=____N;
(3)计算出小石块的密度 =石 ____kg/m3;
(4)测出校训石的长、宽、高分别为 5m、1m、2m,则校训石对水平地面的压强 =____Pa;
(5)校训石与地面接触的右下角是缺损的,则他测算出的压强比实际压强____。
16.按题目要求作图:
(1)如图甲,请画出鸡蛋在水中下沉时的受力示意图;
(2)如图乙,请作出入射光线在玻璃砖 AC面上的反射光线和大致的折射光线;
(3)如图丙,请用笔画线代替导线将两孔插座、电灯和开关分别接入电路。
17.如图,塔式起重机上的滑轮组将重为 1.2 104N的重物匀速吊起 2m时,滑轮组的
机械效率为 80%,g取 10N/kg。
(1)求提升重物做的有用功;
(2)求绳端的拉力;
(3)若动滑轮的质量为 40kg,求克服摩擦和钢丝绳重所做的功。
18.如图,电源电压为 12V,灯泡 L的规格为“6V 3W”,滑动变阻器 R1上标有“20Ω
1A”, 2 10ΩR ,电流表量程为0 3A 。将开关 S闭合,S1、S2断开,调节变阻器使
灯泡正常发光。
(1)求灯泡正常发光时的电阻;
(2)求滑动变阻器 10s内消耗的电能;
(3)将开关 S、S1、S2都闭合,移动滑片 P且电路安全,求 R1与 R2功率之比的最大值。
19.小明探究铅笔芯的电阻大小与长度的关系时,找来一支铅笔芯,测量其长度并用两
枚金属回形针夹住其两端进行实验。
(1)图甲是测铅笔芯电阻的电路,请用笔画线代替导线将其连接完整。_____
①闭合开关,发现两电表均无示数,为排查故障他将电压表改接在变阻器两端,发现电
压表有示数,则电路故障可能是____。
②排除故障,移动滑片 P,电流表示数为 0.14A时,电压表示数如图乙,为____V,测
出的电阻为____Ω。
(2)移动回形针,改变并测量铅笔芯接入电路的长度,实验时发现电流表损坏,他又设计
了图丙电路测量电阻。
①正确连好电路,闭合开关 S,将开关 S1先拨至 b,移动滑动变阻器滑片 P,使电压表
示数为 U。
②再将 S1拨至 a,调节电阻箱旋钮至图丁位置,观察到电压表示数略大于 U,他把“×1”
挡的旋钮又旋了一格,发现电压表示数略小于 U,此时他_____(选填“应”或“不应”)
再调节滑动变阻器,以使电压表的示数恰好为 U。
③推断铅笔芯接入电路的阻值_____(填写范围)。
(3)小明由上述两次实验,得出铅笔芯电阻与长度的关系,请评价他在探究过程中的不足
之处∶______。
20.学习小组用侧壁扎有小孔的长塑料瓶做“探究液体压强特点”的实验时,发现每次
小孔中水的流量 Q(单位时间内喷出水的体积)不同。水的流量与哪些因素有关,大家
提出以下猜想。
猜想 1∶与小孔的形状有关;
猜想 2∶与小孔距水面的深度 h有关;
猜想 3∶与小孔的横截面积 S有关;
(1)为验证猜想 1,他们在三个相同塑料瓶侧壁的同一位置各扎一个小孔,三孔形状如
图甲所示,在小孔处安装阀门和流量计(测流量的仪器)。将瓶中均装满水,打开阀门,
测出流量。此步骤存在的问题是_____。
(2)肯定猜想 1后,为探究猜想 2,他们在同一塑料瓶的不同位置,分别开相同的圆孔进
行实验∶
①下表是实验中测得的数据,请在图乙中描点作出流量 Q与小孔深度的平方根 h的关
系图线,表格中第 3次流量 Q=_____ 3 1cm s 。
②进一步分析,他们认为深度影响流量的原因是深度越大,液体压强越_____,喷出小
孔的水流速也越大。
(3)对于猜想 3,大家认为是正确的。为进一步探究流量 Q与小孔横截面积 S之间的定量
关系,老师画了图丙所示的水柱模型,其中 v表示水从小孔流出的速度,l表示时间 t
内流出水柱的长度,S表示小孔的横截面积。
①根据流量定义并结合模型,推导流量 Q与流速 v、面积 S的关系式∶Q=____;
②通常情况下,喷泉竖直向上喷出的水柱在上升阶段粗细并不均匀,则喷出水柱在空中
上端较____ (选填“粗”或“细”)。
21.阅读短文,回答问题。
智能防疫机器人
我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能。
机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转
变为热图像,实现对人群的体温检测。当发现超温人员,系会自动语音播报,并在显示
屏上用红色框标注人的脸部。
机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,图甲为控制电机运转
的原理电路,U为输入电压,RB为磁敏电阻,阻值随外加磁场强弱的变化而改变。
机器人为有效避障,在移动过程中会发射、接收超声波(或激光)来侦测障碍物信息,
当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线。
下表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减速
器的减速比”为输入转速与输出转速的比值。
(1)机器人在行进过程中遇到玻璃等透明障碍物时,利用____(选填“超声波”或“激
光”)才能较好感知到障碍物:以移动机器人为参照物,障碍物是____的。
(2)下列关于机器人的说法中,错误的是____。
A.菲涅尔透镜的作用相当于凹透镜
B.菲涅尔透镜接收的是人体辐射出的电磁波
C.图甲中电磁铁的上端为 N极
D.机器人发现体温 38℃的人会语音报警并识别
(3)若机器人以最大速度沿水平路面匀速直线运动 7min,此过程中机器人受到的阻力为
____N,消耗的电能占电池所能输出总电能的____ %。
(4)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图乙,当磁敏电阻在正常工作
区时,即使图甲电路中输入电压 U发生改变,R1两端电压 U1都能维持在某一定值附近
微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作区对应图中_____
(选填“ab”或“bc”)段,己知无磁场时 RB阻值为 200Ω,R1的阻值为 400Ω,线圈
电阻忽略不计当 U为 24V时,处在磁场中的 RB电功率为 0.32W,则 R1两端的电压 U1
是_____V。
(5)图丙是机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱动电机旋转
齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为 0。某次当驱动电机的齿
轮匀速转动时,电缆输出如图丁所示周期性变化的电流,则 1s内对准传感器的齿间隙
共有_____个;若此时机器人遇到障碍物,减速器启动,则经减速器降速后的齿轮转速
为_____ r/min。
答案第 1页,总 13页
参考答案
1.D
【解析】
【分析】
【详解】
在远处就能闻到梅花的香味,是因为梅花中含有香味的分子在不断的运动,飘入到人的鼻孔
中,说明了分子在不断地运动。
故选 D。
2.B
【解析】
【分析】
【详解】
用湿手摩擦杯口发声,若改变杯内水量,则水的振动频率会发生变化,改变的是声音的音调。
故选 B。
3.A
【解析】
【分析】
【详解】
A.直行急刹车,乘客上半身由于惯性会保持原来运动状态,所以会向汽车行驶方向前倾,
故 A项符合题意;
B.直行急加速,乘客下半身随汽车加速运动,而上半身由于惯性会保持原来的运动状态,
所以会向后倾,故 B项不符合题意;
CD.向左急转弯或向右急转弯时,由于惯性上半身会向右倾或左倾,故 CD项不符合题意。
故选 A。
4.C
【解析】
【分析】
【详解】
A.手摇式电筒是利用电磁感应现象制成的,磁铁在线圈中来回运动,使线圈切割磁感线,
从而产生了感应电流,使小灯泡发光;验电器的原理是电荷间的作用规律,与手摇电筒的制
答案第 2页,总 13页
成原理无关,故 A不符合题意;
B.闭合开关,小磁针发生偏转,说明通电导体周围具有磁场,与手摇电筒的制成原理无关,
故 B不符合题意;
C.图中导体在磁场中做切割磁感线运动时,电路中产生了感应电流(可以从电流表指针发
生偏转来体现),这是电磁感应现象,与手摇电筒的制成原理相符合,故 C符合题意;
D.此图反映了通电导体在磁场中受到力的作用,与手摇电筒的制成原理无关,故 D不符合
题意。
故选 C。
5.B
【解析】
【分析】
【详解】
A.电冰箱是利用液态制冷剂在冷冻室汽化吸热,在冰箱外液化放热,将冰箱内的热量带到
冰箱外工作的,故 A项不符合题意;
B.油烟机应用的物理知识是流体的流速越大压强越小的原理,故 B项符合题意;
C.微波炉是利用电磁波中的微波加热食物的,故 C项不符合题意;
D.高压锅应用了液体的沸点随气压的増大而增大的原理,故 D项不符合题意。
故选 B。
6.C
【解析】
【分析】
【详解】
根据凸透镜成实像时,遵循物近像远像变大的特点知道,若想再模拟照相机的成像原理,即
要得到缩小的实像,应增大物距,减小像距,则让蜡烛远离透镜,同时让光屏靠近透镜。
故选 C。
7.D
【解析】
【分析】
【详解】
AB.由图可知,裤架左低右高,说明左端较重,所以应将左边或右边的夹子向右移动,故
答案第 3页,总 13页
AB项不符合题意;
C.右边毛巾的下角夹在左边夹子上,相当于给左端增加重物,右端减小重物,使左端更重,
故 C项不符合题意;
D.左边毛中的下角夹在右边夹子上,相当于给左端减小重物,右端减小重物,使左端变轻,
裤架在水平位置平衡,故 D项符合题意。
故选 D。
8.A
【解析】
【分析】
【详解】
AB.纸锥竖直下落时,受到的空气阻力随下落速度的増大而增大,开始下落时重力大于阻
力,合力向下,所以下落速度增大,当受到的空气阻力增大到与重力相等时,合力为零,纸
锥下落的速度不变,故 A项符合题意,B不符合题意;
C.纸锥刚开始加速下落时一部分重力势能转化为动能,当纸锥匀速下落时,重力势能减小,
动能不变,重力势能转化为其它形式的能,故 C项不符合题意;
D.纸锥下落过程中,有空气阻力作用,所以机械能一直减小,故 D项不符合题意。
故选 A。
9.D
【解析】
【分析】
【详解】
由图可知,纸船的高度约为其长度的一半,所以纸船高约 6cm;纸船在水面上漂浮,其排开
水的体积最大值接近船的体积
3 4 312cm 5cm 6cm 360cm 3.6 10 mV V
排 船
纸船排开水的体积达到最大值时,受到的浮力最大
3 3 4 31.0 10 kg/m 10N/kg 3.6 10 m 3.6NF gV 浮 水 排
纸船漂浮,其受到的浮力等于船和硬币的总重力,由于纸船的重力很小可忽略不计,故纸船
受到的浮力近似等于硬币的总重力
3.6NG F 浮总
答案第 4页,总 13页
一枚一元硬币的质量约为 5g,其重力
35 10 kg 10N/kg 0.05NG mg
纸船最多能承载的硬币数目
3.6N 72
0.05N
G
n
G
总
故选 D。
10.C
【解析】
【分析】
【详解】
由图乙可知,气敏传感器两端电压随天然气浓度增大而增大,说明气敏传感器的电阻随浓度
的增大而增大。
AB.R0的功率可表示为
22
0
0
0 0
QU UUP
R R
气敏传感器两端电压与天然气浓度为线性关系,而 R0的功率与气敏传感器两端电压不是线
性关系,所以 R0的功率与天然气浓度为非线性关系,故 AB 项不符合题意;
CD.浓度的增大时,气敏传感器的电阻随之增大,电路中电流减小,总功率减小,故 C项
符合题意,D项不符合题意。
故选 C。
11.漫 增大 做功
【解析】
【分析】
【详解】
[1]发生漫反射时,反射光线会射向各个方向,故即便用强光照射也不觉得刺眼,是因为光
在墙面上发生漫反射。
[2]斜坡比较粗糙,是为了增大摩擦,减小汽车下坡时的速度。
[3]刹车时,刹车块和车轮上的鼓轮摩擦产生热量,这是通过做功的方式增加了刹车片的内
能。
答案第 5页,总 13页
12.右 6.2 4.2×103J 薯片燃烧放出的热量没有完全被水吸收
【解析】
【分析】
【详解】
(1)[1]天平放在水平面上并将游码归零,发现指针偏左说明天平左侧较重,应将平衡螺母向
右调。
[2]由图甲可知,薯片的质量为
5g+1.2g=6.2gm
(2)[3]水吸收的热量为
3 34.2 10 J kg 0.2 Jkg 5 =4.2= 10Q cm t ( ℃) ℃
(3)[4]薯片燃烧放出的热量没有完全被水吸收。
13.是 相互 非平衡力 增大
【解析】
【分析】
【详解】
[1]氢的燃烧物为水,对环境无污染,是清洁能源。
[2]火箭向下喷射燃气,同时燃气对火箭向上的推力作用,说明力的作用是相互的。
[3]火箭加速升空过程,运动状态变化受非平衡力作用。
[4]火箭加速升空过程,速度越来越大,飞船的动能将增大。
14.液化 放 虚 2.7×105 4
【解析】
【分析】
【详解】
(1)[1][2]空气中的热的水蒸气遇到冷的镜面液化为液态的小水滴附着在镜面上形成雾,此过
程放热。
[3]平面镜成的像是反射光线的反向延长线会聚于一点形成的,所以,擦干镜子后,小丽看
到镜子中自己等大的虚像。
(2)[4]根据题意知道,电路消耗 1kW•h电能,指示灯闪烁 1200次,工作指示灯闪烁了 90次
消耗的电能
答案第 6页,总 13页
51kW h 90imp=2.7 10 J
1200imp
W
[5]由
2U
P
R
知道,电热丝的功率
22 220V
1000W
48.4Ω
UP
R
即吹热风时的功率
P 热=100W+1000W=1100W
设热风档时间为 t1 ,则冷风档时间为
t2 =300s-t1
由
W
P
t
知道,
P 热 t1 +P 冷 (300s-t1)=2.7×105 J
解得使用热风档时间
t1=240s=4min
15.零刻度 1 32.5 10 45 10 偏小
【解析】
【分析】
【详解】
(1)[1]使用弹簧测力计前,应检查指针是否指在零刻度线,如果没有,需要校零。
(2)[2]小石块受到的浮力
1 2 2.5N 1.5N 1NF FF 浮
(3)[3]石块的重力等于空气中称量时弹簧测力计的示数,所以石块的质量
1FGm
g g
石
石块在水中浸没,其体积等于被它排开的水的体积
F
V V
g
浮
石 排
水
小石块的密度
答案第 7页,总 13页
1
3 3 3 31 2.5N 1.0 10 kg/m 2.5 10 kg/m
1N
F
m Fg
FV F
g
石
石 水
浮石 浮
水
(4)[4]校训石为形状规则、密度均匀的长方体,它对地面的压强可以利用液体压强的公式来
计算
3 3 42.5 10 kg/m 10N/kg 2m 5 10 Pap gh 石
(5)[5]若校训石与地面接触的右下角有缺损,则他测算出的压强比实际压强偏小。
16.(1) (2) (3)
【解析】
【分析】
【详解】
(1)重力的方向竖直向下,浮力的方向竖直向上,因为铁球下沉,所以重力大于浮力,根据
力的示意图的画法,如图所示:
(2) 过 AC面入射点作出法线,根据反射角等于入射角在法线的另一侧画出反射光线;在空
气中法线的另一侧作出折射光线,注意折射角大于入射角,如图所示:
(3) 灯泡接法:火线进入开关,再进入灯泡顶端的金属点,零线直接接入灯泡的螺旋套,这
样在断开开关能切断火线,接触灯泡不会发生触电事故,既能控制灯泡,又能更安全;两孔
插座的接法:左孔接零线,右孔接火线;如图所示:
答案第 8页,总 13页
17.(1) 2.4×104J;(2) 5×103N;(3) 5.2×103J
【解析】
【分析】
【详解】
(1)提升重物做的有用功
W 有=Gh=1.2×104N×2m=2.4×104J
提升重物做的有用功为 2.4×104J。
(2)由图可知,n=3,则绳端移动的距离
s=nh=3×2m=6m
由η=
W
W
有
总
可得总功
W 总=
W
有 =
42.4 10 J
80%
=3×104J
绳端的拉力
F=
W
s
总 =
43 10
6m
=5×103N
绳端的拉力为 5×103N。
(3)由 W 有+W 额=W 总可得,额外功
W 额=W 总−W 有=3×104J −2.4×104J =6×103J
克服动滑轮重力所做的额外功
W 动=G 动h=m 动gh=40kg 10N/kg 2m=800J
克服摩擦和钢丝绳重所做的功
W′= W 额− W 动=6×103J-800J =5.2×103J
克服摩擦和钢丝绳重所做的功为 5.2×103J。
答:(1)提升重物做的有用功为 2.4×104J;
(2) 绳端的拉力为 5×103N;
答案第 9页,总 13页
(3) 克服摩擦和钢丝绳重所做的功为 5.2×103J。
18.(1)12Ω;(2)30J;(3) 3: 2
【解析】
【分析】
【详解】
(1)由灯泡的铭牌可知灯泡正常发光时的电阻
2 2
L
(6V) 12Ω
3W
U
R
P
额
额
(2)将开关 S闭合,S1、S2断开时,滑动变阻器 R1和灯泡 L串联,此时灯泡正常发光;滑动
变阻器 R1中的电流和灯泡 L的电流相等
1R L
3W 0.5A
6V
P
I I
U
额
额
滑动变阻器 R1的两端电压
1R
12V 6V 6VU U U 总 额
滑动变阻器 10s内消耗的电能
1 1R R 6V 0.5A 10s 30JW U I t
(3)当开关 S、S1、S2都闭合时,灯泡 L被短路,此时为定值电阻 R2和滑动变阻器 R1并联;
R2的电流和电压不会发生变化,所以 R2的功率为定值;滑动变阻器 R1的电压为定值,当
R1的电流最大时,R1的功率达到最大值,此时 R1与 R2功率之比最大。R2的电流
2
2
2
12V 1.2A
10Ω
UI
R
电流表测量的是干路电流,由电流表的量程可知滑动变阻器 R1的最大电流
1 2 3A 1.2A 1.8AI I I
大 大总
R1与 R2功率之比的最大值
1 1 1 1 1
2 2 2 2 2
1.8A 3
1.2A 2
P U I U I I
P U I U I I
大 大 大 大总
总
答:(1)灯泡正常发光时的电阻为12Ω;
(2)滑动变阻器 10s内消耗的电能为30J;
(3)将开关 S、S1、S2都闭合,移动滑片 P且电路安全,R1与 R2功率之比的最大值为3: 2。
答案第 10页,总 13页
19. 滑动变阻器断路 2.8V 20 不应
14Ω~15Ω 见解析
【解析】
【分析】
【详解】
(1)[1]电源为 2节干电池,电压小于 3V,所以电压表量程应选 0~3V的量程,电压表与铅笔
芯并联,铅笔芯串联接入电路。连接电路如图所示:
①[2]闭合开关,电流表无示数说明电路断路,电压表接在铅笔芯两端无示数,而接在滑动
变阻器两端有示数,说明滑动变阻器断路。
②[3]电压表的量程为 0~3V,分度值为 0.1V,所以图乙中电压表的示数为 2.8V。
[4]由欧姆定律可知电阻为
2.8V= =20Ω
0.14A
UR
I
(2)②[5]应用等效法测电阻时,滑动变阻器的电阻应该保持不变,使 S1接 b时铅笔芯两端电
压与 S1接 a时电阻箱两端电压相等,即分压效果相等,电阻箱的电阻等于铅笔芯电阻。所
以实验时不应该移动滑动变阻器。
[6]图丙中电阻箱的阻值为 15Ω,观察到电压表示数略大于 U,他把“×1”挡的旋钮又旋了
一格,发现电压表示数略小于 U,则由串联分压规律可知此时电阻箱阻值变小,即电阻箱的
阻值调为 14Ω,所以铅笔芯接入电路的阻值为 14Ω~15Ω。
(3)[7]实验次数太少,具有偶然性。
答案第 11页,总 13页
20.没有控制小孔的横截面积相同 ,45
大 Q Sv 粗
【解析】
【分析】
【详解】
(1)[1]要探究水的流量与小孔的形状的关系,应控制小孔的大小相同,由图甲知三个小孔的
大小不同,故此步骤存在的问题是没有控制小孔的横截面积相同。
(2)①[2]由表格中数据可得流量 Q与小孔深度的平方根 h成正比,即
3 14 cm sQ h
流量 Q与小孔深度的平方根 h的关系图像如下图
根据图像可知,表格中第 3次流量
3 145cm sQ 。
②[3]由液体压强的特点知,液体深度越大,液体压强越大,喷出小孔的水流速也越大。
(3)[4]流量是表示单位时间内通过某一横截面的流体的体积,由图丙所示的水柱模型,水柱
的长度 l=vt,水柱体积为
答案第 12页,总 13页
V=Sl=Svt
则流量 Q与流速 v、面积 S的关系式为
SvtVQ Sv
t t
[5]任意横截面的流量相等,下端水柱速度较上端水柱的速度大,由 Q=Sv,(S为水柱截面积,
v为水柱中水的流速)可知,上端水柱截面积较大。
21.超声波 运动 A 240 3.33 ab 16 100 10
【解析】
【分析】
【详解】
(1)[1]激光可以在透明介质中传播,超声波遇到障碍物会反射从而被机器人接收到,故机器
人在行进过程中遇到玻璃等透明障碍物时,利用超声波才能较好感知到障碍物。
[2]机器人在运动的过程中,障碍物相对于机器人的位置发生了改变,所以以移动机器人为
参照物,障碍物是运动的。
(2)[3]由题意可知菲涅尔透镜对光线有会聚作用,所以它相当于凸透镜,所以 A错误、符合
题意,故选 A。
(3)[4]驱动电机的机械功率
60% 60% 400W 240WP P 总
机器人以最大速度沿水平路面匀速直线运动时,其受到的阻力和驱动电机的牵引力相等
240W 240N
1m/s
Pf F
v
[5]机器人以最大速度沿水平路面匀速直线运动 7min,其消耗的电能
5400W 7 60 1.68 10 JW P t s 耗 总
电池所能输出的总电能
6 6140W h/kg 10kg=1400W h=1.4kW h=1.4 3.6 10 J=5.04 10 JW 总
消耗的电能占电池所能输出总电能的百分比
5
6
1.68 10 J100% 100% 3.33%
5.04 10 J
W
W
耗
总
(4)[6]由题意可知,磁敏电阻在正常工作区时,其电阻的变化阻很小,所以控制电路两端电
答案第 13页,总 13页
压相对较稳定,所以磁敏电阻的正常工作区对应图中 ab段。
[7]R1和 RB串联,当 U为 24V时,通过 RB的电流
1
24V
400ΩB
B B
UI
R R R
此时 RB的电功率为 0.32W,可得
2 224V( ) ( ) 0.32W
400ΩB B B B
B
P I R R
R
解上式可得
1
2
200Ω
800Ω
B
B
R
R
由于磁敏电阻的正常工作时,其电阻变大不大,故由题意可得此时
1
200ΩB BR R
R1和 RB串联,由串联电路的分压原理可得
1 1 1
1
400Ω 2
24 200Ω 1B B
U U R
U V U R
解上式可得
1 16VU
(5)[8]由丁图可知,10ms内对准传感器的齿间隙为 1个,则 1s内对准传感器的齿间隙共有
3
1s 100
10 10 s
n
即:1s内对准传感器的齿间隙共有 100个。
[9]由丙图可知驱动电机的齿轮间隙共有 20个,也就是说驱动电机的转速为5r/s,若以分钟
为单位,其转速为
5r/s 300r/min
减速器的减速比为30 1 ,故经减速器降速后的齿轮转速为10r/min。
相关文档
- 【中考化学试题,word版,含答案,可再编2021-11-1010页
- 人教版九年级物理下册-第十八章综2021-11-107页
- 鄂尔多斯2020年中考语文试题及答案2021-11-1021页
- 安徽省宣城市2017届九年级初中学业2021-11-1013页
- 绵阳南山中学 模拟考试语文试题2021-11-1017页
- 济南市平阴县2019届九年级上学期期2021-11-1010页
- 广东省广州市荔湾区十校2014年中考2021-11-1010页
- 2018年江苏连云港中考语文试题及答2021-11-1012页
- 济南市章丘区2020年九年级学业水平2021-11-1016页
- 云南省2021年中考语文模拟试题及答2021-11-1020页