

- 371.80 KB
- 2021-05-26 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
第16讲 机械能守恒定律及其应用
考纲要求
考情分析
命题趋势
1.机械能守恒的判断方法Ⅱ
2.单个物体的机械能守恒Ⅱ
3.多个物体的机械能守恒Ⅱ
2016·全国卷Ⅲ,24
机械能守恒定律是力学的重要规律之一,高考常考查验证机械能守恒定律的实验,要深刻理解机械能守恒定律的条件,会应用机械能守恒定律求解力学的综合问题
1.重力做功与重力势能的关系
(1)重力做功的特点
①重力做功与__路径__无关,只与始末位置的__高度差__有关.
②重力做功不引起物体__机械能__的变化.
(2)重力势能
①表达式:Ep=__mgh__.
②重力势能的特点
重力势能是物体和__地球__所共有的,重力势能的大小与参考平面的选取__有关__,但重力势能的变化与参考平面的选取__无关__.
(3)重力做功与重力势能变化的关系
①定性关系:重力对物体做正功,重力势能__减小__;重力对物体做负功,重力势能__增大__;
②定量关系:重力对物体做的功等于物体重力势能增量的负值.即WG=__-(Ep2-Ep1)__=__-ΔEp__.
2.弹性势能
(1)定义:发生__弹性形变__的物体之间,由于有弹力的相互作用而具有的势能.
(2)弹力做功与弹性势能变化的关系:弹力做正功,弹性势能__减小__;弹力做负功,弹性势能__增加__.即W=__-ΔEp__.
3.机械能守恒定律及其应用
(1)内容
在只有__重力__或__弹簧弹力__做功的物体系统内,动能与势能可以相互转化,而总的机械能__保持不变__.
(2)守恒条件
只有__重力或弹簧弹力__做功.
1.请判断下列表述是否正确,对不正确的表述,请说明原因.
(1)被举到高处的物体重力势能可以为零.( √ )
(2)克服重力做功,物体的重力势能一定增加.( √ )
(3)发生弹性形变的物体都具有弹性势能.( √ )
(4)弹簧弹力做正功时,弹性势能增加.( × )
解析 弹簧弹力做正功时,弹性势能减少.
(5)物体在速度增大时,其机械能可能在减小.( √ )
(6)物体所受合外力为零时,机械能一定守恒.( × )
解析 物体所受合外力为零时,运动状态不会发生变化,故动能一定不变,但机械能不一定守恒.
(7)物体受到摩擦力作用时,机械能一定要变化.( × )
解析 物体受摩擦力的作用时,机械能可能不变.例如物体在水平拉力的作用下沿水平粗糙地面匀速运动时,其机械能不变.
(8)在只有重力、弹簧弹力做功的物体系统内,只发生动能和势能的相互转化,物体的机械能一定守恒.( √ )
一 机械能守恒的判断方法
1.机械能守恒的条件:只有重力或系统内的弹力做功.
2.机械能守恒的判断方法:
(1)从机械能的定义直接判断:若物体动能、势能均不变,机械能不变.若一个物体动能不变,重力势能变化,或重力势能不变,动能变化或动能和重力势能同时增加(或减小),其机械能一定变化.
(2)用做功判断:若物体或系统只有重力(或弹簧的弹力)做功,虽受其他外力,但其他外力不做功,则机械能守恒.
(3)用能量转化来判断:若物体系统中只有动能和势能的相互转化而无机械能与其他形式的能的转化,则物体系统的机械能守恒.
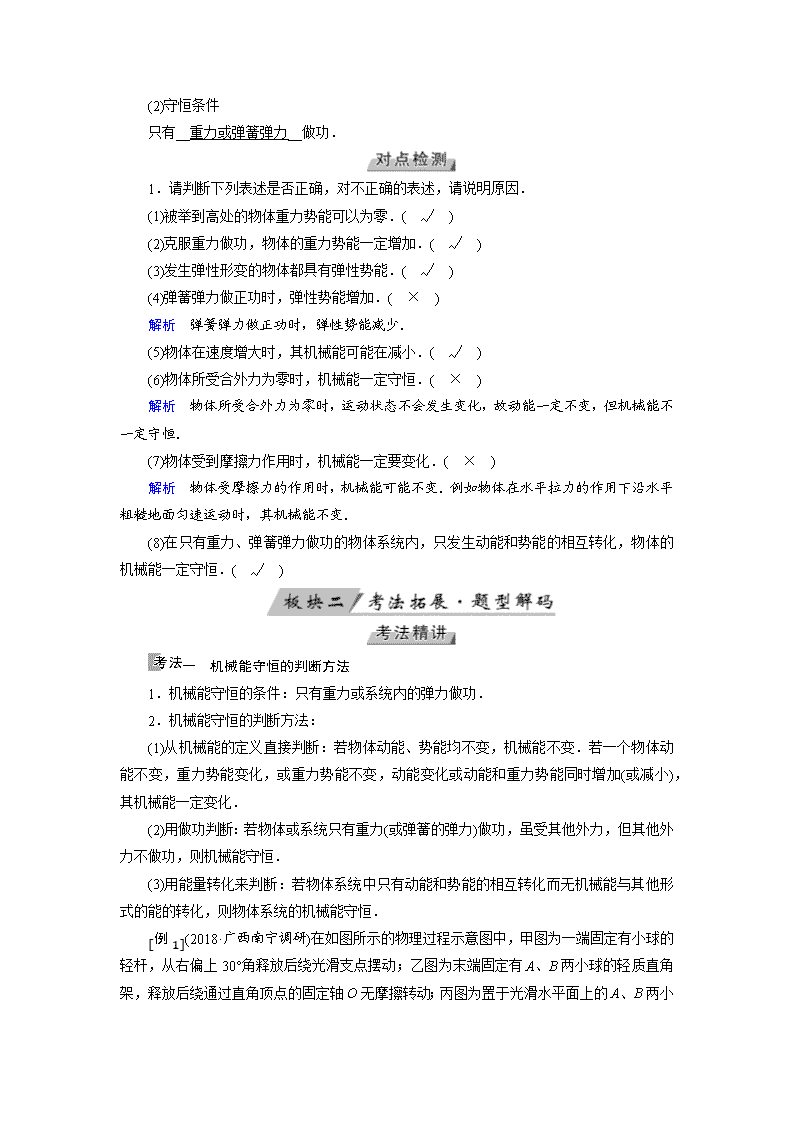
[例1](2018·广西南宁调研)在如图所示的物理过程示意图中,甲图为一端固定有小球的轻杆,从右偏上30°角释放后绕光滑支点摆动;乙图为末端固定有A、B两小球的轻质直角架,释放后绕通过直角顶点的固定轴O无摩擦转动;丙图为置于光滑水平面上的A、B
两小车,B静止,A获得一向右的初速度后向右运动,某时刻连接两车的细绳绷紧,然后带动B车运动;丁图为置于光滑水平面上的带有竖直支架的小车,把用细绳悬挂的小球从图示位置释放,小球开始摆动.则关于这几个物理过程(空气阻力忽略不计),下列判断中正确的是( A )
A.甲图中小球机械能守恒
B.乙图中小球A的机械能守恒
C.丙图中两车组成的系统机械能守恒
D.丁图中小球的机械能守恒
解析 甲图过程中轻杆对小球不做功,小球的机械能守恒;乙图过程中A、B两球通过杆相互影响(例如开始时A球带动B球转动),轻杆对A的弹力不沿杆的方向,会对小球做功,所以每个小球的机械能不守恒,但把两个小球作为一个系统时机械能守恒;丙图中绳子绷紧的过程虽然只有弹力作为内力做功,但弹力突变有内能转化,机械能不守恒;丁图过程中细绳也会拉动小车运动,取地面为参考系,小球的轨迹不是圆弧,细绳会对小球做功,小球的机械能不守恒,把小球和小车当做一个系统,机械能才守恒.
(1)机械能守恒的条件绝不是合外力的功等于零,更不是合外力为零;“只有重力做功”不等于“只受重力作用”.
(2)分析机械能是否守恒时,必须明确要研究的系统.
二 单个物体机械能守恒定律的应用
机械能守恒定律的应用技巧
(1)机械能守恒定律是一种“能—能转化”关系,其守恒是有条件的.因此,应用时首先要对研究对象在所研究的过程中机械能是否守恒做出判断.
(2)如果系统(除地球外)只有一个物体,用守恒观点列方程较方便;对于由两个或两个以上物体组成的系统,用转化或转移的观点列方程较简便.
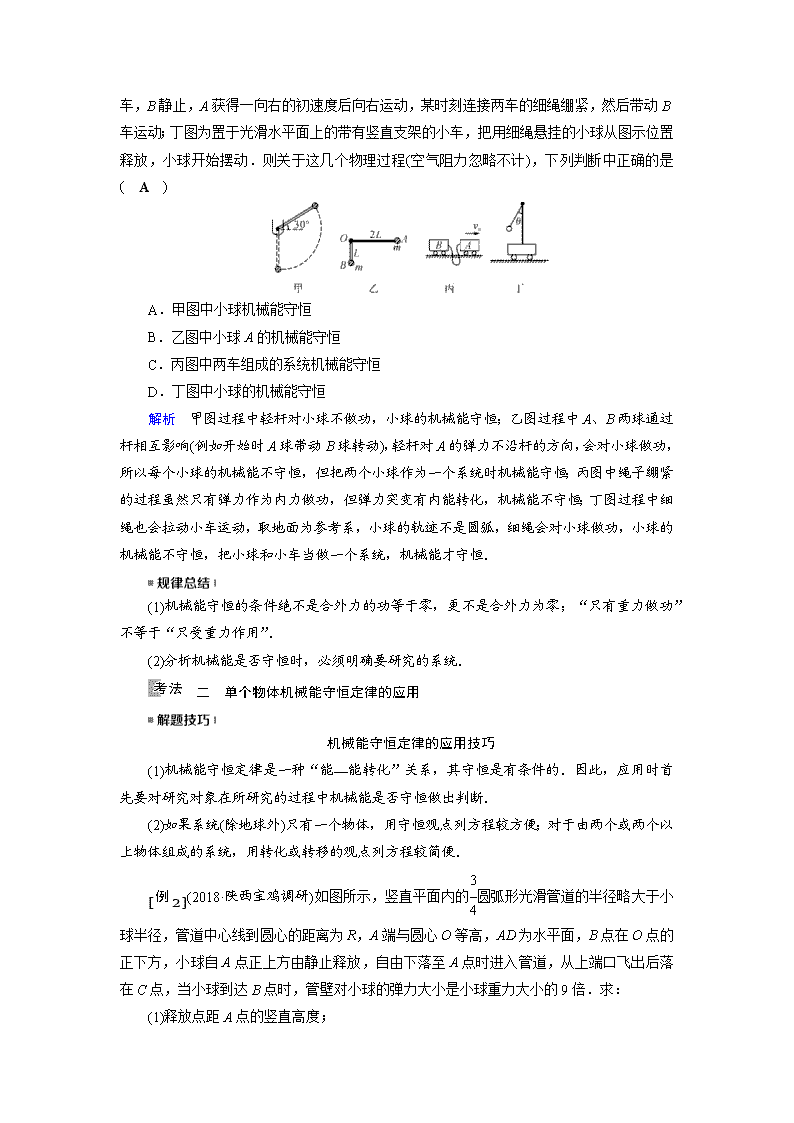
[例2](2018·陕西宝鸡调研)如图所示,竖直平面内的圆弧形光滑管道的半径略大于小球半径,管道中心线到圆心的距离为R,A端与圆心O等高,AD为水平面,B点在O点的正下方,小球自A点正上方由静止释放,自由下落至A点时进入管道,从上端口飞出后落在C点,当小球到达B点时,管壁对小球的弹力大小是小球重力大小的9倍.求:
(1)释放点距A点的竖直高度;
(2)落点C与A点的水平距离.
解析 (1)设小球到达B点的速度为v1,因为到达B点时,管壁对小 球的弹力大小是小球重力大小的9倍,所以有9mg-mg=.设B点为重力势能的零点,由机械能守恒定律得mg(h+R)=mv,解得h=3R.
(2)设小球到达最高点的速度为v2,落点C与A点的水平距离为x.由机械能守恒定律得mv=mv+mg·2R,
由平抛运动的规律得R=gt2,R+x=v2t,
解得x=(2-1)R.
答案 (1)3R (2)(2-1)R
三 多个物体的机械能守恒
1.对多个物体组成的系统,要注意判断物体运动过程中系统的机械能是否守恒.
判断方法:看是否有其他形式的能与机械能相互转化.
2.三种守恒表达式的比较
角度
公式
意义
注意事项
守恒
观点
Ek1+Ep1=
Ek2+Ep2
系统的初状态机械能的总和与末状态机械能的总和相等
初、末状态必须用同一零势能面计算势能
转化
观点
ΔEk=
-ΔEp
系统减少(或增加)的重力势能等于系统增加(或减少)的动能
应用时关键在于分清重力势能的增加量和减少量,可不选零势能面而直接计算初、末状态的势能差
转移
观
ΔEA增=
ΔEB减
若系统由A、B两物体组成,则A物体机械能的增加量与B物体机械能的减少量相等
常用于解决两个或多个物体组成的系统的机械能守恒问题
点
[例3](2016·湖北黄冈模拟)如图所示,三条长度均为L的轻杆两两夹120°在O点连接且能绕垂直杆的水平固定转轴在竖直平面内做无摩擦的转动,三条杆的另一端点A、B、C分别固定着质量为3m、2m、m的小球,从图示位置开始,在该装置顺时针转动120°的过程中,求轻杆OA、OB、OC分别对质量为3m、2m、m的小球所做的功.
解析 三球的速度大小相等,设为v.在杆顺时针转动120°时,C球的重力势能不变,A球重力势能的变化量ΔEpA=-3mg·L,B球重务势能的变化量ΔEpB=2mg·L,对三个小球组成的系统,由机械能守恒定律有-(ΔEpA+ΔEpB)=ΔE,
即3mg·L-2mg·L=(m+2m+3m)v2-0,
解得v=.
在转动过程中,设轻杆OA、OB、OC分别对质量3m、2m、m的小球所做的功分别为WA、WB、WC,对三个小球分别由动能定理有
对质量为3m的小球
3mg·L+WA=·3mv2-0,
对质量为2m的小球
-2mg·L+WB=2mv2-0,
对质量为m的小球WC=mv2-0,
解得WA=-mgL,WB=mgL,WC=mgL.
答案 -mgL mgL mgL
多物体机械能守恒问题
(1)多物体机械能守恒问题的分析方法
①对多个物体组成的系统要注意判断物体运动过程中,系统的机械能是否守恒;
②注意寻找用绳或杆相连接的物体间的速度关系和位移关系;
③列机械能守恒方程时,一般选用ΔEk=-ΔEp的形式.
(2)多物体机械能守恒问题的三点注意
①正确选取研究对象;
②合理选取物理过程;
③正确选取机械能守恒定律常用的表达形式列式求解.
四 绳索、链条类机械能守恒问题
对绳索、链条之类的问题,由于在考查过程中其常发生形变,其重心位置对物体来说并不是固定不变的,能否正确确定重心的位置,是解决该类问题的关键.一般情况下常分段考虑各部分的势能,并用各部分势能之和作为系统总的重力势能,至于参考平面,可任意选取,但以系统初、末状态重力势能便于表示为宜.
[例4]如图所示,有一条长为L的均匀金属链条,一半长度在光滑斜面上,斜面倾角为θ,另一半长度沿竖直方向下垂在空中,当链条从静止开始释放后滑动,求链条刚好从右侧全部滑出斜面时的速度是多大?
[思维导引]研究对象:链条.
隐含条件:释放后的链条,竖直方向的一半向下运动,放在斜面上的一半向上运动,由于竖直部分越来越多,所以链条做的是变加速运动,不能用匀变速直线运动的公式去解.
思路分析:因为斜面光滑,所以机械能守恒,链条得到的动能应是由重力势能转化来的,重力势能的变化可以用重心的位置确定,要注意释放时的重力势能可分左右两段考虑,然后再求和.
解析 设斜面的最高点为零势能点,设链条的总质量为m,开始时左半部分的重力势能为
EP1=-g·sin θ=-mgLsin θ,
右半部分的重力势能为EP2=-g·=-mgL,
机械能E1=EP1+EP2=-(1+sin θ),
当链条刚好全部滑出斜面时,重力势能EP=-mg,动能Ek=mv2,机械能E2=EP+EK=-+mv2,
由机械能守恒定律得E1=E2,
所以-(1+sin θ)=-+mv2,
解得v=.
答案
1.(2017·江苏常州模拟)如图所示,斜劈劈尖顶着竖直墙壁静止于水平面上,现将一小球从图示位置静止释放,不计一切摩擦,则在小球从释放到落至地面的过程中,下列说法正确的是( B )
A.斜劈对小球的弹力不做功
B.斜劈与小球组成的系统机械能守恒
C.斜劈的机械能守恒
D.小球重力势能减少量等于斜劈动能的增加量
解析 不计一切摩擦,小球下滑时,小球和斜劈组成的系统只有小球的重力做功,系统机械能守恒,选项B正确,C、D错误;斜劈对小球的弹力与小球位移间夹角大于90°,故弹力做负功,选项A错误.
2.如图所示,将质量为2m的重物悬挂在轻绳的一端,轻绳的另一端系一质量为m的环,环套在竖直固定的光滑直杆上,光滑定滑轮与直杆的距离为d.现将环从与定滑轮等高的A处由静止释放,当环沿直杆下滑距离也为d时(图中B处),下列说法正确的是(重力加速度为g)( B )
A.环刚释放时轻绳中的张力等于2mg
B.环到达B处时,重物上升的高度为(-1)d
C.环在B处的速度与重物上升的速度大小之比为
D.环减少的机械能大于重物增加的机械能
解析 环释放后重物加速上升,故绳中张力一定大于2mg,选项A错误;环到达B处时,绳与直杆间的夹角为45°,重物上升的高度h=(-1)d,选项B正确;如图所示,将B处环速度v进行正交分解,重物上升的速度与其分速度v1大小相等,v1=vcos 45°=v,
所以,环在B处的速度与重物上升的速度大小之比等于,选项C错误;环和重物组成的系统机械能守恒,故选项D错误.
3.(2018·湖南岳阳调研)如图所示,一根长L=5 m的轻绳一端固定在O′点,另一端系一质量m=1 kg的小球.将轻绳伸直拉至水平并将小球由位置A静止释放,小球运动到最低点O时,轻绳刚好被拉断.O点下方有一以O点为圆心,半径R=5 m的圆弧状的曲面,所有阻力不计,已知重力加速度g=10 m/s2.求:
(1)轻绳所能承受的最大拉力Fm的大小;
(2)小球落至曲面上的动能Ek.
解析 (1)小球由A至O的过程,由机械能守恒定律,有
mgL=mv,
在O点,由牛顿第二定律有
Fm-mg=m,
解得Fm=30 N,
由牛顿第三定律可知轻绳所能承受的最大拉力为30 N.
(2)小球从O点平抛飞出,有
x=v0t,y=gt2,
小球落至曲面上,根据几何关系有
x2+y2=R2,
小球落至曲面上的速度为
v=,
小球落至曲面上的动能为
Ek=mv2,
解得Ek=100 J.
答案 (1)30 N (2)100 J
[例1](12分)如图所示,在长为L的轻杆中点A和端点B各固定一质量均为m的小球,杆可绕O轴无摩擦地转动,使杆从水平位置无初速度释放摆下.求当杆转到竖直位置时,轻杆对A、B两球分别做了多少功?
[答题送检]来自阅卷名师报告
错误
致错原因
扣分
(1)
错误地认为杆的弹力方向总是沿杆的方向.用杆连接一个物体绕杆的一个端点转动时,杆对物体的弹力方向始终与物体运动方向垂直;而在杆连接两物体绕杆的一个端点转动时,由于两物体独自绕杆运动时的快慢不同,会导致杆对物体产生垂直杆的侧向分力.
-12
[规范答题]
[解析] 设当杆转到竖直位置时,A球和B球的速度分别为vA和vB,如果把轻杆、地球、两个小球构成的系统作为研究对象,那么由于杆和小球的相互作用力做功总和等于零,故系统机械能守恒.若取B球的最低点所在的水平面为零势能面,可得2mgL=mv+mv+mgL.
又因A球与B球在各个时刻对应的角速度相同,故vB=2vA.
由以上二式得vA=,vB=.
根据动能定理,可解出杆对A、B做的功,
对于A有WA+=mv-0,
所以WA=-0.2mgL,
对于B有WB+mgL=mv-0,所以WB=0.2 mgL.
答案 -0.2 mgL(6分) 0.2 mgL(6分)
1.(2017·全国卷Ⅱ)如图,半圆形光滑轨道固定在水平地面上,半圆的直径与地面垂直.一
小物块以速度v从轨道下端滑入轨道,并从轨道上端水平飞出,小物块落地点到轨道下端的距离与轨道半径有关,此距离最大时对应的轨道半径为(重力加速度大小为g)( B )
A. B.
C. D.
解析 小物块由最低点到最高点的过程中,由机械能守恒定律有
mv2=mg·2R+mv,
小物块从最高点水平飞出做平抛运动有2R=gt2,
x=v1t,(x为落地点到轨道下端的距离)
联立得x2=R-16R2,
由数学知识可知,当R=-,即R=时,x具有最大值,选项B正确.
2.如图所示为某游乐场内水上滑梯轨道示意图,整个轨道在同一竖直平面内,表面粗糙的AB段轨道与四分之一光滑圆弧轨道BC在B点水平相切.点A距水面的高度为H,圆弧轨道BC的半径为R,圆心O恰在水面.一质量为m的游客(视为质点)可从轨道AB的任意位置滑下,不计空气阻力.
(1)若游客从A点由静止开始滑下,到B点时沿切线方向滑离轨道落在水面D点,OD=2R,求游客滑到B点时的速度vB的大小及运动中轨道摩擦力对其所做的功Wf;
(2)若游客从AB段某处滑下,恰好停在B点,又因为受到微小扰动,继续沿圆弧轨道滑到P点后滑离轨道,求P点离水面的高度h.(提示:在圆周运动过程中任一点,质点所受的向心力与其速率的关系为F向=m)
解析 (1)游客从B点做平抛运动,有2R=vBt,R=gt2,
解得vB=,
从A到B,根据动能定理,有mg(H-R)+Wf=mv-0,
解得Wf=2mgR-mgH.
(2)设OP与OB间夹角为θ,游客在P点时的速度为vP,受到的支持力为N,从B到P由机械能守恒定律,有
mg(R-Rcos θ)=mv-0,
过P点时,根据牛顿第二定律,有mgcos θ-N=m,
又N=0,cos θ=,解得h=R.
答案 (1)2mgR-mgH (2)R
3.山谷中有三块石头和一根不可伸长的轻质青藤,其示意图如图所示.图中A、B、C、D均为石头的边缘点,O为青藤的固定点,h1=1.8 m,h2=4.0 m,x1=4.8 m,x2=8.0 m.开始时,质量分别为M=10 kg和m=2 kg的大、小两只滇金丝猴分别位于左边和中间的石头上,当大猴发现小猴将受到伤害时,迅速从左边石头的A点水平跳至中间石头.大猴抱起小猴跑到c点,抓住青藤下端,荡到右边石头上的D点,此时速度恰好为零.运动过程中猴子均可看成质点,空气阻力不计,重力加速度g=10 m/s2.求:
(1)大猴从A点水平跳离时速度的最小值;
(2)抓住青藤荡起时的速度大小;
(3)猴子荡起时,青藤对猴子的拉力大小.
解析 (1)设大猴从A点水平跳离时速度的最小值为vmin,根据平抛运动规律,有h1=gt2,
x1=vmint,
代入数据解得vmin=8 m/s.
(2)猴子抓住青藤后的运动过程中机械能守恒,设荡起时的速度为vC,则有(M+m)gh2=(M+m)v,
解得vC== m/s≈9 m/s.
(3)设拉力为FT,青藤的长度为L,在最低点,根据牛顿第二定律有
FT-(M+m)g=(M+m),
由几何关系是(L-h2)2+x22=L2,
代入数据解得FT=216 N.
答案 (1)8 m/s (2)9 m/s (3)216 N
1.如图所示,固定的竖直光滑长杆上套有质量为m的小圆环,圆环与水平状态的轻质弹簧一端连接,弹簧的另一端连接在墙上,且处于原长状态.现让圆环由静止开始下滑,已知弹簧原长为L,圆环下滑到最大距离时弹簧的长度变为2L(未超过弹性限度),则在圆环下滑到最大距离的过程中( B )
A.圆环的机械能守恒
B.弹簧弹性势能变化了mgL
C圆环下滑到最大距离时,所受合力为零
D.圆环重力势能与弹簧弹性势能之和保持不变
解析 圆环沿杆下滑的过程中,圆环与弹簧组成的系统动能、弹性势能、重力势能之和守恒,选项A、D错误;弹簧长度为2L时,圆环下落的高度h=L,根据机械能守恒定律,弹簧的弹性势能增加了ΔEp=mgh=mgL,选项B正确;圆环释放后,圆环向下先做加速运动,后做减速运动,当速度最大时,合力为零,下滑到最大距离时,具有向上的加速度,合力不为零,选项C错误.
2.(多选)如图,滑块a、b的质量均为m,a套在固定竖直杆上,与光滑水平地面相距h,b放在地面上.a、b通过铰链用刚性轻杆连接,由静止开始运动.不计摩擦,a、b可视为质点,重力加速度大小为g.则( BD )
A.a落地前,轻杆对b一直做正功
B.a落地时速度大小为
C.a下落过程中,其加速度大小始终不大于g
D.a落地前,当a的机械能最小时,b对地面的压力大小为mg
解析 设某一时刻a、b速度分别为va、vb,则vacos θ=vbsin θ.当a落到地面时,θ=90°,cos θ=0,故vb为0,可知a下落过程中b先加速后减速,轻杆对b先做正功后做负功,选项A错误.轻杆对a的力先为支持力后为拉力,故a的加速度先小于g后大于g,选项C
错误.由于a、b系统只有重力和系统内杆的弹力做功,故a、b机械能守恒,a落地时b速度为零,由机械能守恒定律得mgh=mv,得va=.选项B正确.当a机械能最小时,b的机械能最大,即动能最大,此时F杆=0,故FN=mg,选项D正确.
3.如图,在竖直平面内有由圆弧AB和圆弧BC组成的光滑固定轨道,两者在最低点B平滑连接.AB弧的半径为R,BC弧的半径为.一小球在A点正上方与A相距处由静止开始自由下落,经A点沿圆弧轨道运动.
(1)求小球在B、A两点的动能的比值;
(2)通过计算判断小球能否沿轨道运动到C点.
解析 (1)设小球的质量为m,小球在A点的动能为EkA,由机械能守恒得EkA=mg,①
设小球在B点的动能为EkB,同理有EkB=mg,②
由①②式得=5.③
(2)若小球能沿轨道运动到C点,小球在C点所受轨道的正压力N应满足N≥0,④
N+mg=m,⑤
由④⑤式得,vC应满足mg≤m,⑥
由机械能守恒有mg=mv,⑦
由⑥⑦式可知,小球恰好可以沿轨道运动到C点.
答案 (1)5 (2)能
4.如图所示,倾角θ=37°光滑斜面的底端的固定挡板上连接一轻弹簧,斜面顶端与半径为R的竖直平面内的光滑圆弧轨道相切于B点.质量m的物块甲将弹簧压缩至A点,A、B间距为3R,由静止释放物块甲,物块甲运动到圆弧轨道最高点C时,
对轨道的压力大小等于物块甲重力的1.4倍,不计空气阻力,重力加速度为g,sin 37°=0.6,cos 37°=0.8.
(1)求释放物块甲时弹簧具有的弹性势能Ep;
(2)若将物块甲换成物块乙,仍将弹簧压缩至A点后由静止释放,为使物块乙恰能经过圆弧轨道最高点C,求物块乙的质量m0.
解析 (1)根据牛顿第三定律可得,物块甲经过圆弧轨道C点,轨道对物块甲的弹力为1.4mg,设物块甲经过圆弧轨道C点的速度为v1,由牛顿第二定律有1.4mg+mg=m,
对物块甲从A点运动到C点的过程中,由机械能守恒定律有
Ep=mg(3Rsin θ+Rcos θ+R)+mv,
解得Ep=4.8 mgR.
(2)设物块乙经过圆弧轨道C点的速度为v2,由牛顿第二定律有
m0g=m0,
对物块乙从A点运动到C点的过程中,由机械能守恒定律有
Ep=m0g(3Rsin θ+Rcos θ+R)+m0v,
解得m0=m.
答案 (1)4.8mgR (2)m
课时达标 第16讲
[解密考纲]理解机械能守恒定律运用的条件,会应用机械能守恒定律求解力学综合问题.
1.如图所示,长为L的均匀链条放在光滑水平桌面上,且使长度的垂在桌边,松手后链条从静止开始沿桌边下滑,则链条滑至刚刚离开桌边时的速度大小为( C )
A. B.
C. D.4
解析 由机械能守恒定律ΔEp减=ΔEk增,即mg·-mg·=mv2,所以v=.选项C正确.
2.将一小球从高处水平抛出,最初2 s内小球动能Ek随时间t变化的图象如图所示,不计空气阻力,g取10 m/s2.根据图象信息,不能确定的物理量是( D )
A.小球的质量
B.小球的初速度
C.最初2 s内重力对小球做功的平均功率
D.小球拋出时的高度
解析 由机械能守恒定律可得Ek=Ek0+mgh,又h=gt2,所以Ek=Ek0+mg2t2.当t=0时,Ek0=mv=5 J,当t=2 s时,Ek=Ek0+2mg2=25 J,联立方程解得m=0.1 kg,v0=10 m/s.当t=2 s时,由动能定理得WG=ΔEk=20 J,故==10 W.根据图象信息,无法确定小球抛出时离地面的高度.综上所述,选项D正确.
3. 如图所示,有一内壁光滑的闭合椭圆形管道,置于竖直平面内,MN是通过椭圆中心O点的水平线.已知一小球从M点出发,初速率为v0,沿管道MPN运动,到N点的速率为v1,所需时间为t1;若该小球仍由M点以初速率v0出发,而沿管道MQN运动,到N点的速率为v2,所需时间为t2.则( A )
A.v1=v2,t1>t2 B.v1t2
C.v1=v2,t1t2.选项A正确.
4.如图所示,固定的倾斜光滑杆上套有一个质量为m的圆环,圆环与竖直放置的轻弹簧一端相连,弹簧的另一端固定在地面上的A点,弹簧处于原长h.让圆环沿杆滑下,滑到杆的底端时速度刚好为零.则在圆环下滑过程中( C )
A.圆环机械能守恒
B.弹簧的弹性势能一定先增大后减小
C.弹簧的弹性势能变化了mgh
D.弹簧的弹性势能最大时圆环的动能最大
解析 下滑过程中圆环和弹簧组成的系统机械能守恒,选项A错误;在圆环下滑过程中,弹簧的弹性势能先增大后减小再增大,选项B错误;圆环初、末状态的动能都为零,则减少的重力势能转化为弹簧的弹性势能,且弹簧的弹性势能最大时,圆环速度为零,选项C正确,选项D错误.
5.(多选)由光滑细管组成的轨道如图所示,其中AB段和BC段是半径为R的四分之一圆弧,轨道固定在竖直平面内.一质量为m的小球,从距离水平地面为H的管口D处静止释放,最后能够从A端水平抛出落到地面上.下列说法正确的是( BC )
A.小球落到地面时相对于A点的水平位移值为2
B.小球落到地面时相对于A点的水平位移值为2
C.小球能从细管A端水平抛出的条件是H>2R
D.小球能从细管A端水平抛出的最小高度Hmin=R
解析 小球能从A端射出,则H>2R,选项C正确,D错误;设A端射出的速度为v,D端到A端由动能定理得
mg(H-2R)=mv2,①
小球从A端射出后做平抛运动,落地点水平位移
x=v,②
由①②可得x=2,选项B正确,A错误.
6.(2017·山东济南模拟)将小球以10 m/s
的初速度从地面竖直向上抛出,取地面为零势能面,小球在上升过程中的动能Ek、重力势能Ep与上升高度h间的关系分别如图中两直线所示.设阻力大小恒定,g取10 m/s2,下列说法正确的是( D )
A.小球的质量为0.2 kg
B.小球受到的阻力(不包括重力)大小为0.20 N
C.小球动能与重力势能相等时的高度为 m
D.小球上升到2 m时,动能与重力势能之差为0.5 J
解析 在最高点,Ep=mgh得m=0.1 kg,选项A错误;由除重力以外其他力做功W其=ΔE可知-Ffh=E高-E低,E为机械能,解得Ff=0.25 N,选项B错误;设小球动能和重力势能相等时的高度为H,此时有mgH=mv2,由动能定理得-FfH-mgH=mv2-mv,解得H= m,故选项C错误;当上升h′=2 m时,由动能定理得-Ffh′-mgh′=Ek2-mv,解得Ek2=2.5 J,Ep2=mgh′=2 J,所以动能与重力势能之差为0.5 J,故选项D正确.
7.(2017·海南海口模拟)(多选)我国“蛟龙号”在某次试验时,深潜器内的显示屏上显示出了从水面开始下潜到最后返回水面的10 min内全过程的深度曲线甲和速度图象乙,则正确的有( AC )
A.甲图中h3代表本次下潜最大深度为360 m
B.全过程中最大加速度是0.025 m/s2
C.潜水员感到失重体验发生在0~1 min和8~10 min内
D.整个潜水器在8~10 min时间段内机械能守恒
解析 “蛟龙号”下潜的最大深度为前4 min内v-t图线与t轴所围面积,h3=(120+240)×2× m=360 m,选项A正确;全过程中最大加速度大小am= m/s2=m/s2,选项B错误;在0~1 min和8~10 min内深潜器具有向下的加速度,潜水员处于失重状态,选项C正确;在8~10 min内,潜水器的加速度方向向下,a= m/s2= m/s2
,不是只有重力做功,机械能不守恒,选项D错误.
8.(多选)如图所示,半径为R的光滑圆环固定在竖直平面内,O是圆心,虚线OC水平,D是圆环最低点.两个质量均为m的小球A、B套在圆环上,两球之间用轻杆相连,从图示位置由静止释放,则( BD )
A.B球运动至最低点D时,A、B球组成的系统重力势能最小
B.A、B球组成的系统在运动过程中机械能守恒
C.A球从C点运动至D点过程中受到的合外力做正功
D.当轻杆水平时,A、B球速度达到最大
解析 A、B球组成的系统在运动过程中机械能守恒,当A、B球高度相同时系统重力势能最小,动能最大,A球从C点运动至D点过程中受到的合外力先做正功后做负功,所以只有选项B、D正确.
9.(多选)如图所示,半径为R,内径很小的光滑半圆形管道竖直放置,其底端与水平地面相切.一质量为m的小球(小球直径很小且略小于管道内径)以某一水平初速度进入管内,小球通过最高点P时,对管壁的压力大小为0.5mg(不考虑小球落地后反弹情况),则( AD )
A.小球落地点到P点的水平距离可能为R
B.小球落地点到P点的水平距离可能为2R
C.小球进入圆管道的初速度大小可能为
D.小球进入圆管道的初速度大小可能为
解析 小球在最高点P的速度有两种可能mg+0.5mg=m,或mg-0.5mg=m,解得v1=,v2=,则小球落地点到P点的水平距离可能为x1=v1=R,x2=v2=R,所以选项A正确,B错误;又根据机械能守恒有mv=mv+mg·2R,分别代入v1,v2有v01=,v02=,故选项C错误,D正确.
10.如图所示,一个半径为R、质量为m的均匀薄圆盘处在竖直平面内,
可绕过其圆心O的水平转动轴无摩擦转动,现在其右侧挖去圆心与转轴O等高、直径为R的一个圆,然后从图示位置将其静止释放,则下列说法正确的是( A )
A.剩余部分不能绕O点做360°转动,在转动过程中具有的最大动能为mgR
B.剩余部分不能绕O点做360°转动,在转动过程中具有的最大动能为mgR
C.剩余部分能绕O点做360°转动,在转动过程中具有的最大动能为mgR
D.剩余部分能绕O点做360°转动,在转动过程中具有的最大动能为mgR
解析 依题意知在薄圆盘右侧挖去的圆心与转轴O等高、直径为R的一个圆的质量为m1=m,根据对称性可在其左侧对称挖去一个同样大小的圆(如图所示),余下部分的薄圆盘的重心仍在圆心O,故当圆心O1在最低点时,系统的重力势能最小,动能最大,根据机械能守恒定律可得Ekm=mgR,当圆心O1转到右侧与O等高时,薄圆盘将停止转动,故剩余部分只能绕O点做180°转动,所以只有选项A正确.
11.如图所示,光滑的水平桌面上有一轻弹簧,左端固定在A点,水平桌面右侧有一竖直放置的光滑轨道MNP,其形状为半径R=0.8 m的圆环剪去了左上角135°的圆弧,MN为其竖直直径,P点到桌面的竖直距离也是R.用质量m=0.2 kg的物块将弹簧缓慢压缩到C点,弹簧具有的弹性势能为Ep,释放后物块从桌面右边缘D点飞离桌面后,由P点沿圆轨道切线落入圆轨道,g=10 m/s2.求:
(1)Ep的大小;
(2)判断m能否沿圆轨道到达M点.
解析 (1)设物块由D点以初速度vD做平抛运动,落到P点时其竖直速度为vy,由v=2gR,
=tan 45°,得vD=4 m/s,
物块从C→D由机械能守恒得
Ep=Ek=mv=×0.2×42 J=1.6 J.
(2)设物块能沿轨道到达M点,其速度为vM,从C→M整个过程由机械能守恒定律得Ep=mv+mgR·cos 45°,
代入数据解得vM≈2.2 m/s<≈2.8 m/s,
所以物块不能到达M点.
答案 (1)1.6 J (2)不能到达M点
12.如图所示,在同一竖直平面内,一轻质弹簧静止放于光滑斜面上,其一端固定,另一端恰好与水平线AB平齐;长为L的轻质细绳一端固定在O点,另一端系一质量为m的小球,将细绳拉至水平,此时小球在位置C.现由静止释放小球,小球到达最低点D时,细绳刚好被拉断,D点与AB相距h,之后小球在运动过程中恰好与弹簧接触并沿斜面方向压缩弹簧,弹簧的最大压缩量为x.试求:
(1)细绳所能承受的最大拉力F;
(2)斜面倾角θ的正切值;
(3)弹簧所获得的最大弹性势能Ep.
解析 (1)小球由C运动到D的过程机械能守恒,则
mgL=mv,
解得v1=,
在D点由牛顿第二定律得
F-mg=m,
解得F=3mg,
由牛顿第三定律知,细绳所能承受的最大拉力为3mg.
(2)小球由D运动到A的过程做平抛运动,则v=2gh,
解得vy=,tan θ==.
(3)小球到达A点时,有v=v+v=2g(h+L),
小球在压缩弹簧的过程中,小球与弹簧组成的系统机械能守恒,则EP=mgxsin θ+m
v,
解得Ep=mg.
答案 (1)3mg (2) (3)mg