

- 747.00 KB
- 2021-05-26 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
第 3 节 机械能守恒定律
考点 1 ? 机械能守恒的理解和判断 【p84】
夯实基础
1.重力势能
(1)重力做功的特点
①重力做功与__路径__无关,只与始末位置的__高度差__有关.
②重力做功不引起物体__机械能__的变化.
(2)重力势能
①概念:物体由于__被举高__而具有的能.
②表达式:Ep=__mgh__.
③标矢性:重力势能是__标量__,正、负分别表示比 0 值大、比 0 值小.
④系统性:重力势能是__物体和地球__这一系统所共有的.
⑤相对性:Ep=mgh 中的 h是__相对于零势能面__的高度.
(3)重力做功与重力势能变化的关系
①定性关系:重力对物体做正功,重力势能就__减少__;重力对物体做负功,重力势能就__增加__.
②定量关系:重力对物体做的功__等于__物体重力势能增量的负值,即 WG=-ΔEp=-(Ep2-Ep1)=Ep1
-Ep2.
③重力势能的变化量是绝对的,与零势能面的选择无关.
2.弹性势能
(1)概念:物体由于发生__弹性形变__而具有的能.
(2)大小:弹簧的弹性势能的大小与形变量及劲度系数有关,弹簧的形变量__越大__,劲度系数__越
大__,弹簧的弹性势能越大.
(3)弹力做功与弹性势能变化的关系类似于重力做功与重力势能变化的关系,用公式表示:W=__-Δ
Ep__.
3.机械能守恒定律
(1)__势能__和__动能__统称为机械能,即 E=Ek+Ep,其中势能包括__重力势能__和__弹性势能__.
(2)机械能守恒定律
内容:在只有__重力(或弹簧弹力)__做功的物体系统内,动能与势能可以相互转化,而总的机械能__
保持不变__.
考点突破
例 1 某娱乐项目中,参与者抛出一小球去撞击触发器,从而进入下一关.现在将这个娱乐项目进行简
化,假设参与者从触发器的正下方以速率 v 竖直上抛一小球,小球恰好击中触发器.若参与者与触发器间
的竖直距离不变,沿 A、B、C、D 四个不同的光滑轨道分别以速率 v 抛出小球,如图所示.则小球能够击
中触发器的可能是( )
【解析】小球以 v 竖直上抛的最大高度为 h,到达最大高度时速度为 0;小球不能上升到最高点就做
斜抛运动了,不能击中触发器,故 A错误;小球离开斜面后做斜抛运动了,不能击中触发器,故 B错误;
根据机械能守恒定律可知,小球上升到最高点时速度刚好等于零,可以击中触发器,故 C 正确;在双轨中
做圆周运动时到达最高点的速度可以为零,所以小球可以上升到最高点并击中触发器,故 D正确.
【答案】CD
【小结】判断机械能是否守恒的方法
(1)利用机械能的定义判断:分析动能与势能的和是否变化.如:匀速下落的物体动能不变,重力势
能减少,物体的机械能必减少.
(2)用做功判断:若物体或系统只有重力(或弹簧的弹力)做功,或有其他力做功,但其他力做功的代
数和为零,机械能守恒.
(3)用能量转化来判断:若系统中只有动能和势能的相互转化,而无机械能与其他形式的能的转化,
则系统的机械能守恒.
(4)对一些绳子突然绷紧、物体间非弹性碰撞等问题机械能一般不守恒,除非题中有特别说明或暗示.
针对训练
1.关于机械能是否守恒,下列说法正确的是(C)
A.做匀速直线运动的物体机械能一定守恒
B.做匀速圆周运动的物体机械能一定守恒
C.做变速运动的物体机械能可能守恒
D.合外力对物体做功不为零,机械能一定不守恒
【解析】做匀速直线运动的物体与做匀速圆周运动的物体,如果是在竖直平面内则机械能不守恒,A、
B 错误;合外力做功不为零,机械能可能守恒,如只有重力做功时,机械能守恒,D 错误、C正确.
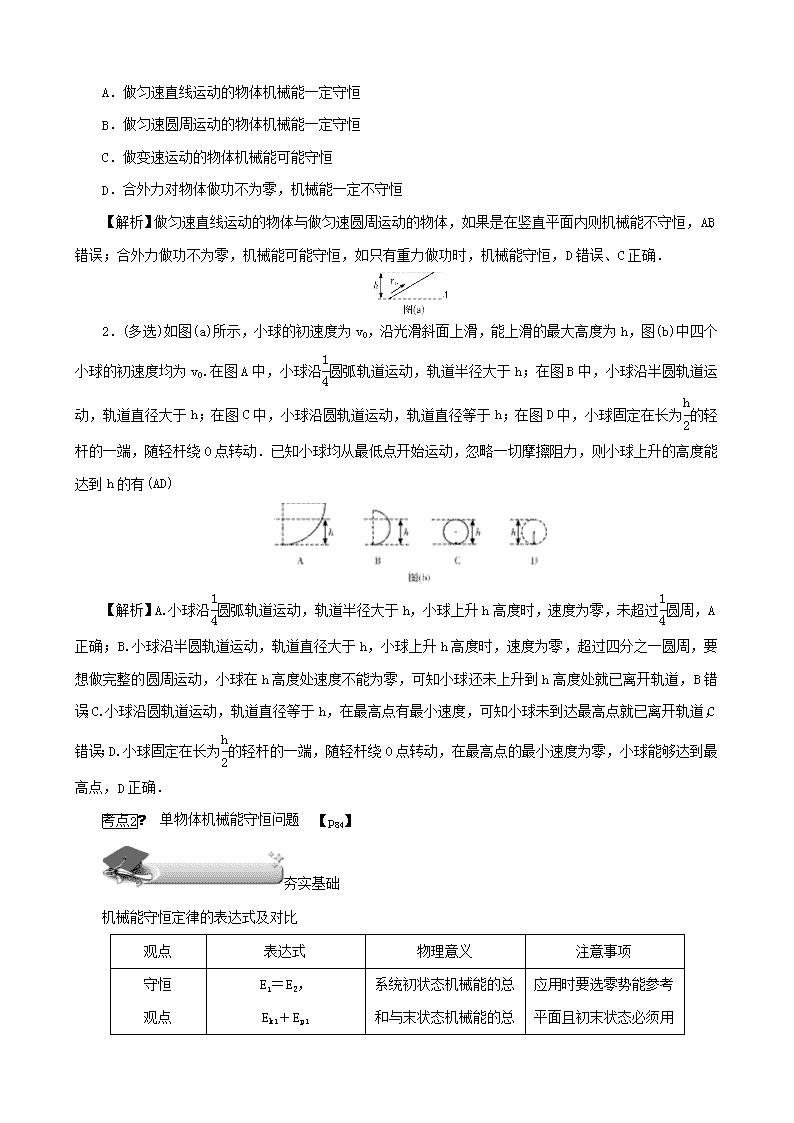
2.(多选)如图(a)所示,小球的初速度为 v0,沿光滑斜面上滑,能上滑的最大高度为 h,图(b)中四个
小球的初速度均为 v0.在图 A 中,小球沿
1
4
圆弧轨道运动,轨道半径大于 h;在图 B 中,小球沿半圆轨道运
动,轨道直径大于 h;在图 C 中,小球沿圆轨道运动,轨道直径等于 h;在图 D 中,小球固定在长为
h
2
的轻
杆的一端,随轻杆绕 O点转动.已知小球均从最低点开始运动,忽略一切摩擦阻力,则小球上升的高度能
达到 h 的有(AD)
【解析】A.小球沿
1
4
圆弧轨道运动,轨道半径大于 h,小球上升 h高度时,速度为零,未超过
1
4
圆周,A
正确;B.小球沿半圆轨道运动,轨道直径大于 h,小球上升 h 高度时,速度为零,超过四分之一圆周,要
想做完整的圆周运动,小球在 h 高度处速度不能为零,可知小球还未上升到 h 高度处就已离开轨道,B 错
误;C.小球沿圆轨道运动,轨道直径等于 h,在最高点有最小速度,可知小球未到达最高点就已离开轨道,
C 错误;D.小球固定在长为
h
2
的轻杆的一端,随轻杆绕 O 点转动,在最高点的最小速度为零,小球能够达到
最高点,D 正确.
考点 2 ? 单物体机械能守恒问题 【p84】
夯实基础
机械能守恒定律的表达式及对比
观点 表达式 物理意义 注意事项
守恒 E1=E2, 系统初状态机械能的总 应用时要选零势能参考
观点 Ek1+Ep1
=Ek2+Ep2
和与末状态机械能的总
和相等
平面且初末状态必须用
同一零势能面计算势能
转化
观点
ΔEk=
-ΔEp
表示系统(或物体)机械
能守恒时,系统减少(或
增加)的重力势能等于
系统增加(或减少)的动
能
应用时关键在于分清重
力势能的增加量和减少
量,不用选零势能面,
可直接计算初末状态的
势能差
转移
观点
ΔEA=
-ΔEB
若系统由 A、B 两部分组
成,则 A 部分物体机械
能的增加量与 B 部分物
体机械能的减少量相等
常用于解决两个或多个
物体组成的系统的机械
能守恒问题,不用选零
势能参考平面
考点突破
例 2
如图,一个质量为 0.6 kg 的小球以某一初速度从 P 点水平抛出,恰好从光滑圆弧 ABC 的 A 点的切线
方向进入圆弧(不计空气阻力,进入圆弧时无机械能损失).已知圆弧的半径 R=0.3 m,θ=60°,小球到
达 A点时的速度 v=4 m/s.(取 g=10 m/s
2
)求:
(1)小球做平抛运动的初速度 v0 ;
(2)P 点与 A点的水平距离和竖直高度;
(3)小球到达圆弧最高点 C时对轨道的压力.
【解析】(1)v0=vx=vcos θ=4×cos 60°=2 m/s
(2)vy=vsin θ=4×sin 60°=2 3 m/s
由平抛运动规律得:v
2
y=2gh
vy=gt
x=v0t
h=0.6 m
x=0.4 3 m≈0.69 m
(3)取 A 点为重力势能的零点,由机械能守恒定律得:
1
2
mv2=
1
2
mv
2
C+mg(R+Rcos θ)
代入数据得:vC= 7 m/s
由圆周运动向心力公式得:NC+mg=
mv
2
C
R
代入数据得:NC=8 N
由牛顿第三定律得:小球对轨道的压力大小
N′C=NC=8 N,方向竖直向上.
【小结】1.用机械能守恒定律解题的基本思路
2.机械能守恒定律的应用往往与曲线运动综合起来,其联系点主要在初末状态的速度与圆周运动的
动力学问题有关、与平抛运动的初速度有关.
针对训练
3.在如图所示的物理过程示意图中,甲图为一端固定有小球的轻杆,从右偏上 30°角释放后绕光滑
支点摆动;乙图为末端固定有小球的轻质直角架,释放后绕通过直角顶点的固定轴 O无摩擦转动;丙图为
轻绳一端连着一小球,从右偏上 30°角处自由释放;丁图为置于光滑水平面上的带有竖直支架的小车,把
用细绳悬挂的小球从图示位置释放,小球开始摆动,则关于这几个物理过程(空气阻力忽略不计),下列判
断中正确的是(A)
A.甲图中小球机械能守恒
B.乙图中小球 A机械能守恒
C.丙图中小球机械能守恒
D.丁图中小球机械能守恒
【解析】甲图中,只有重力对小球做功,机械能守恒,乙图中,杆对 A 球做负功,丙图中,绳子绷紧
时有机械能损失,丁图中绳子拉力对小球做负功,所以乙、丙、丁图中小球机械能都不守恒.
4.如图,在竖直平面内有由
1
4
圆弧 AB 和
1
2
圆弧 BC 组成的光滑固定轨道,两者在最低点 B平滑连接.AB
弧的半径为 R,BC 弧的半径为
R
2
.一小球在 A 点正上方与 A 相距
R
4
处由静止开始自由下落,经 A 点沿圆弧轨
道运动.
(1)求小球在 B、A 两点的动能之比;
(2)通过计算判断小球能否沿轨道运动到 C 点.
【解析】(1)设小球的质量为 m,小球在 A 点的动能为 EkA,由机械能守恒定律得 EkA=mg
R
4
①
设小球在 B 点的动能为 EkB,同理有 EkB=mg
5R
4
②
由①②式得
EkB
EkA
=5③
(2)若小球能沿轨道运动到 C 点,则小球在 C点所受轨道的压力 N 应满足 N≥0④
设小球在 C 点的速度大小为 vC,由牛顿第二定律和向心加速度公式有 N+mg=m
v
2
C
R
2
⑤
由④⑤式得,vC应满足 mg≤m
2v
2
C
R
⑥
由机械能守恒定律得 mg
R
4
=
1
2
mv
2
C⑦
由⑥⑦式可知,小球恰好可以沿轨道运动到 C 点.
考点 3 ? 多物体机械能守恒问题 【p86】
夯实基础
1.多物体机械能守恒问题的分析方法
(1)对多个物体组成的系统先要判断物体运动过程中,系统的机械能是否守恒;
(2)找出用绳或杆相连接的物体间的速度关系和位移关系;
(3)列机械能守恒方程时一般运用ΔEk=-ΔEp的形式.
2.多物体机械能守恒问题的三点注意
(1)正确选取研究对象;
(2)合理选取物理过程;
(3)正确选取机械能守恒定律常用的表达形式列式计算.
考点突破
例 3 如图所示,一半径为 R 的光滑半圆柱水平悬空放置,C为圆柱最高点,两小球 P、Q用一轻质细线
悬挂在半圆柱上,水平挡板 AB 及两小球开始时位置均与半圆柱的圆心在同一水平线上,水平挡板 AB 与半
圆柱间有一小孔能让小球通过,两小球质量分别为 mP=m,mQ=4m,水平挡板到水平面 EF 的距离为 h=2R,
现让两小球从图示位置由静止释放,当小球 P 到达最高点 C 时剪断细线,小球 Q 与水平面 EF 碰撞后等速
反向被弹回,重力加速度为 g,不计空气阻力,取π≈3.求:
(1)小球 P 到达最高点 C 时的速度 vC;
(2)小球 P 落到挡板 AB 上时的速率 v1;
(3)小球 Q 反弹后能上升的最大高度 hmax.
【解析】(1)取两小球及细线为系统且圆心所在水平面为零势能面,则在小球 P 到达最高点 C 的过程
中,系统满足机械能守恒,有-mQg×
1
4
×2πR+mPgR+
1
2
(mP+mQ)v
2
C=0,解得 vC= 2gR.
(2)因 vC> gR,所以剪断细线后小球 P 做平抛运动,由机械能守恒定律知 mPgR+
1
2
mPv
2
C=
1
2
mPv
2
1,解得 v1
=2 gR.
(3)剪断细线后,小球 Q 做竖直下抛运动,反弹后做竖直上抛运动到最高点,满足机械能守恒,则有
-mQg×
1
4
×2πR+
1
2
mQv
2
C=-mQg(h-hmax),解得 hmax=
3
2
R.
【小结】1.本题中剪断细线前,细线对两小球均做功,两小球的机械能均不守恒,但取两小球和细线
为系统,则只有重力做功,满足机械能守恒.剪断细线后两小球的机械能均守恒,因此运用机械能守恒定
律解题时,一定要注意研究对象的选择.
2.系统机械能守恒时,内部的相互作用力分为两类:
(1)刚体产生的弹力:如轻绳产生的弹力,斜面产生的弹力,轻杆产生的弹力等.
(2)弹簧产生的弹力:系统中有弹簧,弹簧的弹力在整个过程中做功,弹性势能参与机械能的转化.
在前两种情况中,轻绳的拉力、斜面的弹力、轻杆产生的弹力做功,使机械能在相互作用的两物体间
进行等量的转移,系统的机械能守恒.虽然弹簧的弹力也做功,但包括弹性势能在内的机械能也守恒.
3.对系统应用机械能守恒定律列方程的角度:
(1)系统初态的机械能等于末态的机械能;
(2)系统中某些物体减少的机械能等于其他物体增加的机械能.
针对训练
5.(多选)如图所示,带有挡板的光滑斜面固定在水平面上,斜面倾角θ=30°.质量均为 1 kg 的 A、
B 两物体用轻质弹簧拴接在一起,弹簧的劲度系数为 5 N/cm,质量为 2 kg 的物体 C 用细线通过光滑的轻
质滑轮与物体 B 连接.开始时 A、B 均静止在斜面上,A紧靠在挡板处.用手托住 C,使细线刚好被拉直.现
把手拿开,让 C 由静止开始运动,从 C 开始运动到 A 刚要离开挡板的过程中,下列说法不正确的是(g 取
10 m/s
2
)(BC)
A.初状态弹簧的压缩量为 1 cm
B.末状态弹簧的压缩量为 1 cm
C.物体 B、C 与地球组成的系统机械能守恒
D.物体 C 克服绳的拉力所做的功为 0.2 J
【解析】开始弹簧压缩量 x1=
mBgsin 30°
k
=1 cm,末状态弹簧拉伸量 x2=
mAgsin 30°
k
=1 cm,A 对,
B 错;该过程中,弹簧对 B、C 系统先做正功,后做负功,故机械能守恒,C 错;对 B、C 系统,由动能定
理,mCg(x1+x2)-mBg(x1+x2)sin 30°=
1
2
(mB+mC)v
2;对 C,由动能定理,mCg(x1+x2)-WT=
1
2
mCv
2,可解得:
WT=0.2 J,D 对.
6.如图,质量为 m 的木块放在光滑的水平桌面上,用轻绳绕过桌边光滑的定滑轮与质量为 2m 的砝码
相连,让绳拉直后使砝码从静止开始下降 h 的距离时砝码未落地,木块仍在桌面上,这时砝码的速率为多
少?
【解析】解法一:对木块和砝码组成的系统,只有重力势能和动能的转化,故机械能守恒,以砝码末
位置所在平面为参考平面,由机械能守恒定律得:
即
1
2
mv
2
+mgH
+
1
2
(2m)v2=mgH+2mgh
解得:v=
4
3
gh
解法二:对木块和砝码组成的系统,由机械能守恒定律得:
Emk+E2mk增=E2mp 减
即:
1
2
mv
2
+
1
2
(2m)v
2
=2mgh
解得:v=
4
3
gh
解法三:对木块和砝码组成的系统机械能守恒
ΔEm 增=ΔE2m 减
1
2
mv
2
=2mgh-
1
2
(2m)v
2
,解得 v=
4
3
gh.
考 点 集 训 【p293】
A 组
1.(多选)如图所示,下列说法正确的是(CD)
A.甲图中,物体 A 将弹簧压缩的过程中,A机械能守恒
B.乙图中,A 置于光滑水平面,物体 B沿光滑斜面下滑,物体 B 机械能守恒
C.丙图中,不计任何阻力及滑轮质量时 A 加速下落,B 加速上升过程中,A、B 系统机械能守恒
D.丁图中,小球沿水平面做匀速圆锥摆运动时,小球的机械能不变
【解析】甲图中重力和弹力做功,物体 A 和弹簧组成的系统机械能守恒,但物体 A 机械能不守恒,A
错.乙图中物体 B 除受重力外,还受弹力,弹力对 B 做负功,机械能不守恒,但从能量特点看 A、B 组成
的系统机械能守恒,B 错.丙图中绳子张力对 A 做负功,对 B做正功,代数和为零,A、B 系统机械能守恒,
C 对.丁图中小球的动能不变,势能不变,机械能不变,D 对.
2.由光滑细管组成的轨道如图所示,其中 AB 段和 BC 段是半径为 R 的四分之一圆弧,轨道固定在竖
直平面内.一质量为 m 的小球,从距离水平地面为 H 的管口 D 处静止释放,最后能够从 A端水平抛出落到
地面上.关于管口 D 距离地面的高度 H 必须满足的条件是(B)
A.等于 2R
B.大于 2R
C.大于 2R 且小于
5
2
R
D.大于
5
2
R
【解析】D→A,由机械能守恒,小球减少的重力势能等于增加的动能 mg(H-2R)=
1
2
mv
2
A,vA>0,
∴H>2R,即可水平抛出,选 B.
3.一小球以一定的初速度从图示位置进入光滑的轨道,小球先进入圆轨道 1,再进入圆轨道 2,圆轨
道 1 的半径为 R,圆轨道 2 的半径是轨道 1 的 1.8 倍,小球的质量为 m,若小球恰好能通过轨道 2 的最高
点 B,则小球在轨道 1上经过 A处时对轨道的压力为(C)
A.2mg B.3mg C.4mg D.5mg
【解析】设经过 A、B 点的速度分别为 vA、vB,A 点:N+mg=
mv
2
A
R
,B 点:mg=
mv
2
B
1.8R
,A 点到 B 点,由机
械能守恒定律有:
1
2
mv
2
A+mg2R=
1
2
mv
2
B+mg×2×1.8R,联立解之可得 N=4mg,选 C.
4.从高处自由下落的物体,它的重力势能 Ep和机械能 E随下落的距离 h的变化图线(下图)正确的是(以
地面为零势能面)(C)
【解析】下落距离为 0 时,重力势能最大,下落距离最大时,重力势能为 0,故 A、B 错误;物体自由
下落的过程中,只有重力做功,机械能守恒,故 C正确,D错误.
5.(多选)如图所示,将质量为 2m 的重物悬挂在轻绳的一端,轻绳的另一端系一质量为 m 的小环,小
环套在竖直固定的光滑直杆上,光滑定滑轮与直杆的距离为 d.现将小环从定滑轮等高的 A处由静止释放,
当小环沿直杆下滑距离也为 d 时(图中 B 处),下列说法正确的是(ACD)
A.环到达 B处时,重物上升的高度为( 2-1)d
B.环在 B 处的速度与重物上升的速度大小之比等于
2
2
C.环在 B 处的速度为 (3-2 2)gd
D.环能下降的最大高度为
4d
3
【解析】重物上升的高度 h= 2d-d=( 2-1)d,A 对;设 B下降的速度为 vB,则重物上升的速度 vx
=vBcos 45°=
2
2
vB,
vB
vx
= 2,B 错;对于环和重物组成的系统用机械能守恒定律,ΔEp=ΔEk,mgd-2mg( 2
-1)d=
1
2
mv
2
B+
1
2
2mv
2
x,可解得 vB= (3-2 2)gd,C对;设环能下降的最大高度为 hm,对系统用机械能守
恒定律:ΔE1=ΔE2,mghm=2mg( h
2
m+d
2
-d),
∴hm=
4
3
d,D 对.
6.如图所示,将一个内外侧均光滑的半圆形槽置于光滑的水平面上,槽的左侧有一固定的竖直墙壁.现
让一小球自左端槽口 A点的正上方由静止开始下落,从 A 点与半圆形槽相切进入槽内,则下列说法正确的
是(C)
A.小球在半圆形槽内运动的全过程中,只有重力对它做功
B.小球从最低点向右侧最高点运动的过程中,小球的机械能守恒
C.小球从最低点向右侧最高点运动的过程中,小球与槽组成的系统机械能守恒
D.小球从下落到从右侧离开槽的过程中,机械能守恒
【解析】小球从最低点向右侧最高点运动的过程中,槽对小球做负功,故 A、B、D 都错,这个过程中,
球槽组成的系统只有重力对球做功,系统机械能守恒,C 对.
7.(多选)如图所示是固定在桌面上的 L 形木块,abcd 为光滑圆轨道的一部分,圆轨道的半径为 R,a
为轨道的最高点,de 面水平且与圆心等高.将质量为 m 的小球在 d点正上方 h高处释放,小球自由下落到
d 处切入轨道运动,则(AD)
A.要使小球通过 a 点的条件是 h≥1.5R
B.在 h一定的条件下,释放小球后小球能否到 a点,与小球质量有关
C.改变 h 的大小,就可使小球在通过 a点后可能落回轨道之内,也可能落在 de 面上
D.无论怎样改变 h 的大小,都不可能使小球在通过 a点后又落回轨道内
【解析】小球通过 a 点时的最小速度为 v,依 mg≤
mv
2
R
,
∴v
2
≥Rg,
又依机械能守恒,mgh=mgR+
1
2
mv2,∴h≥1.5R,A 对.
上式知,h 与 m 无关,B 错;若小球能通过 a 点,必然有 v2≥Rg,若刚好落到 d 点,则有 R=vt,h′
=
1
2
gt
2
,h′≤
R
2
,
∴不可能落回轨道内,C 错,D对.
B 组
8.半径为 R的光滑圆环竖直放置,环上套有质量分别为 m 和 3m 的小球 A 和 B.A、B 之间用一长为 2R
的轻杆相连,如图所示.开始时,A、B 都静止,且 A 在圆环的最高点,现将 A、B无初速释放,试求:
(1)B 球到达最低点时的速度大小;
(2)B 球到达最低点的过程中,杆对 A 球做的功.
【解析】(1)vA=vB=v,选过 O点的水平面为零势能面,A、B 系统机械能守恒,
mgR=
1
2
( 3+1)mv
2
- 3mgR,∴v= 2gR.
(2)对 A 用动能定理,mgR+W 杆=
1
2
mv
2
,W 杆=0
9.如图所示,一半径 r=0.2 m 的
1
4
光滑圆弧形槽底端 B 与水平传送带平滑相接,传送带的运行速度
为 v0,长为 L=1.25 m, 滑块与传送带间的动摩擦因数μ=0.2,DEF 为固定于竖直平面内的一段内壁光滑
的中空方形细管,EF 段被弯成以 O为圆心、半径 R=0.25 m 的一小段圆弧,管的 D 端弯成与水平传送带 C
端平滑相接,O 点位于地面,OF 连线竖直.一质量为 m=0.2 kg 的物块 a 从圆弧顶端 A 点无初速滑下,滑
到传送带上后一直做匀加速运动,然后滑块被传送带送入管 DEF.已知 a 物块可视为质点,a 的横截面略小
于管中空部分的横截面,重力加速度 g 取 10 m/s2.求:
(1)滑块 a 到达底端 B时的速度 vB;
(2)滑块 a 刚到达管顶 F 点时对管壁的压力.
【解析】(1)设滑块到达 B点的速度为 vB,由机械能守恒定律,有 mgr=
1
2
mv
2
B
解得 vB=2 m/s
(2)滑块在传送带上做匀加速运动,受到传送带对它的滑动摩擦力,由牛顿第二定律μmg=ma
滑块对地位移为 L,末速度为 vC,
由速度位移关系式 2aL=v
2
C-v
2
B
得 vC=3 m/s,滑块从 C 至 F,由机械能守恒定律,有
1
2
mv
2
C=mgR+
1
2
mv
2
F得 vF=2 m/s> Rg
在 F 处由牛顿第二定律 mg+FN=m
v
2
F
R
得 FN=1.2 N
由牛顿第三定律得管上壁受压力为 1.2 N, 压力方向竖直向上.
10.如图所示,半径 R=1 m 的光滑半圆轨道 AC 与倾角θ=37°的粗糙斜面轨道 BD 放在同一竖直平
面内,两轨道之间由一条光滑水平轨道 AB 相连,B 处用光滑小圆弧平滑连接.在水平轨道上,用挡板把 a、
b 两物块挡住后处于静止状态,a、b两物块间夹有被压缩的轻质弹簧,物块与弹簧不拴接.只放开左侧挡
板,物块 a 恰好通过半圆轨道最高点 C;只放开右侧挡板,物块 b 恰好能到达斜面轨道最高点 D.已知物块
a 的质量为 m1=2 kg,物块 b 的质量为 m2=1 kg,物块与斜面间的动摩擦因数为μ=0.5,物块到达 A点或
B 点时已和弹簧分离.重力加速度 g取 10 m/s
2
,sin 37°=0.6,cos 37°=0.8,求:
(1)物块 a 经过半圆轨道的 A 点时对轨道的压力 FN;
(2)斜面轨道 BD 的高度 h.
【解析】(1)a 物块在最高点 C时,有 m1g=m1
v
2
C
R
①
a 物块从 A 点运动到 C点过程,由机械能守恒定律得
1
2
m1v
2
A=2m1gR+
1
2
m1v
2
C②
a 物块到达圆轨道 A 点时,F 支-m1g=m1
v
2
A
R
③
由牛顿第三定律,物块对轨道的压力 FN=F 支④
由①②③④得,物块对轨道的压力 FN=120 N
(2)a 物块弹开后运动到 A点过程,由系统的机械能守恒得:
弹簧的弹性势能 Ep=
1
2
m1v
2
A
对 b 物块,由能量守恒定律得,Ep=m2gh+μm2gcos θ·
h
sin θ
解得斜面轨道 BD 的高度 h=3 m
11.质量分别为 m 和 2m 的两个小球 P 和 Q,中间用轻质杆固定连接,杆长为 L,在离 P 球
L
3
处有一个
光滑固定轴 O,如图所示.现在把杆置于水平位置后自由释放,在 Q球顺时针摆动到最低位置时,求:
(1)小球 P 的速度大小;
(2)在此过程中小球 P机械能的变化量.
【解析】(1)由题意知,P、Q 的运动轨迹半径分别为:rP=
L
3
,rQ=
2
3
L.
P 和 Q 角速度相同 v∝r,设 P 的速度为 v,则 Q 的速度为 2v,
对 P、Q系统依机械能守恒定律:
ΔEp=ΔEk,2mg·
2
3
L-mg·
L
3
=
1
2
mv
2
+
1
2
·2m(2v)
2
v=
2gL
3
.
(2)P 增加的机械能ΔEp=mg
L
3
+
1
2
mv
2
=
4
9
mgL