
- 2.75 MB
- 2021-05-13 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
基本的力和运动
Ⅰ。力的种类:(13个性质力) 这些性质力是受力分析不可少的“受力分析的基础”
重力: G = mg (g随高度、纬度、不同星球上不同)
A
B
弹簧的弹力:F= Kx
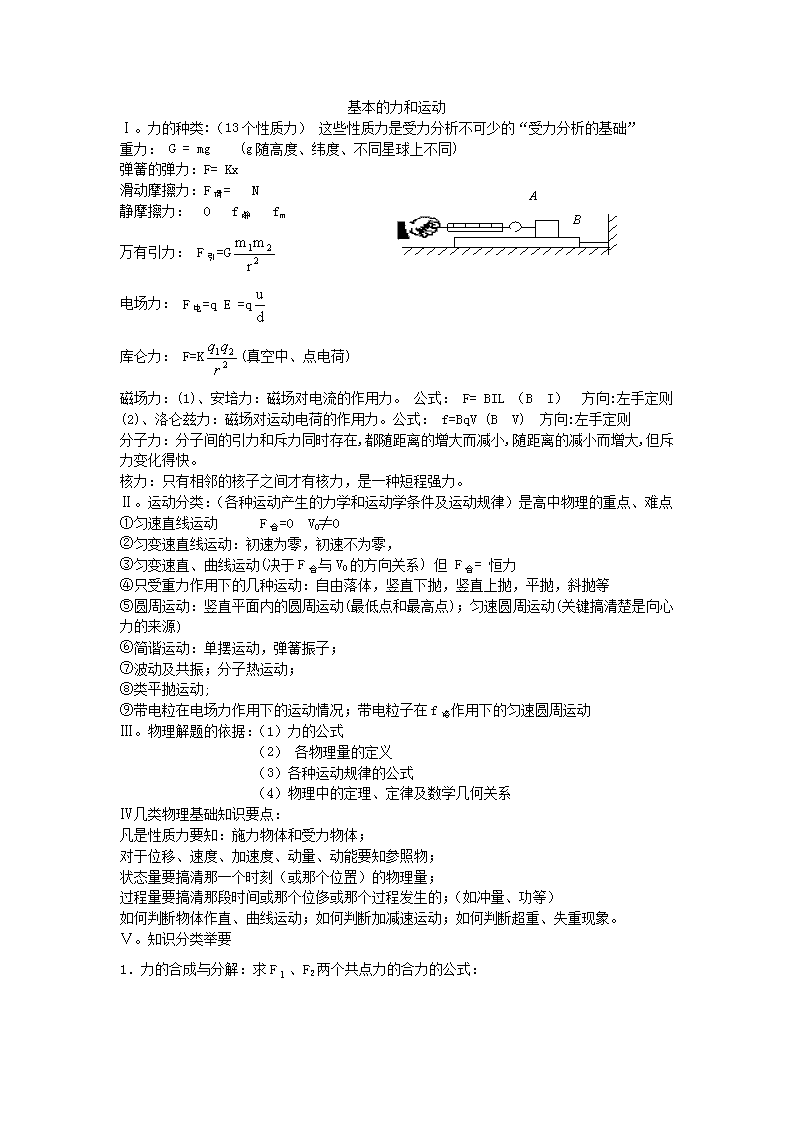
滑动摩擦力:F滑= mN
静摩擦力: O£ f静£ fm
万有引力: F引=G
电场力: F电=q E =q
库仑力: F=K(真空中、点电荷)
磁场力:(1)、安培力:磁场对电流的作用力。 公式: F= BIL (B^I) 方向:左手定则
(2)、洛仑兹力:磁场对运动电荷的作用力。公式: f=BqV (B^V) 方向:左手定则
分子力:分子间的引力和斥力同时存在,都随距离的增大而减小,随距离的减小而增大,但斥力变化得快。
核力:只有相邻的核子之间才有核力,是一种短程强力。
Ⅱ。运动分类:(各种运动产生的力学和运动学条件及运动规律)是高中物理的重点、难点
①匀速直线运动 F合=0 V0≠0
②匀变速直线运动:初速为零,初速不为零,
③匀变速直、曲线运动(决于F合与V0的方向关系) 但 F合= 恒力
④只受重力作用下的几种运动:自由落体,竖直下抛,竖直上抛,平抛,斜抛等
⑤圆周运动:竖直平面内的圆周运动(最低点和最高点);匀速圆周运动(关键搞清楚是向心力的来源)
⑥简谐运动:单摆运动,弹簧振子;
⑦波动及共振;分子热运动;
⑧类平抛运动;
⑨带电粒在电场力作用下的运动情况;带电粒子在f洛作用下的匀速圆周运动
Ⅲ。物理解题的依据:(1)力的公式
(2) 各物理量的定义
(3)各种运动规律的公式
(4)物理中的定理、定律及数学几何关系
Ⅳ几类物理基础知识要点:
凡是性质力要知:施力物体和受力物体;
对于位移、速度、加速度、动量、动能要知参照物;
状态量要搞清那一个时刻(或那个位置)的物理量;
过程量要搞清那段时间或那个位侈或那个过程发生的;(如冲量、功等)
如何判断物体作直、曲线运动;如何判断加减速运动;如何判断超重、失重现象。
Ⅴ。知识分类举要
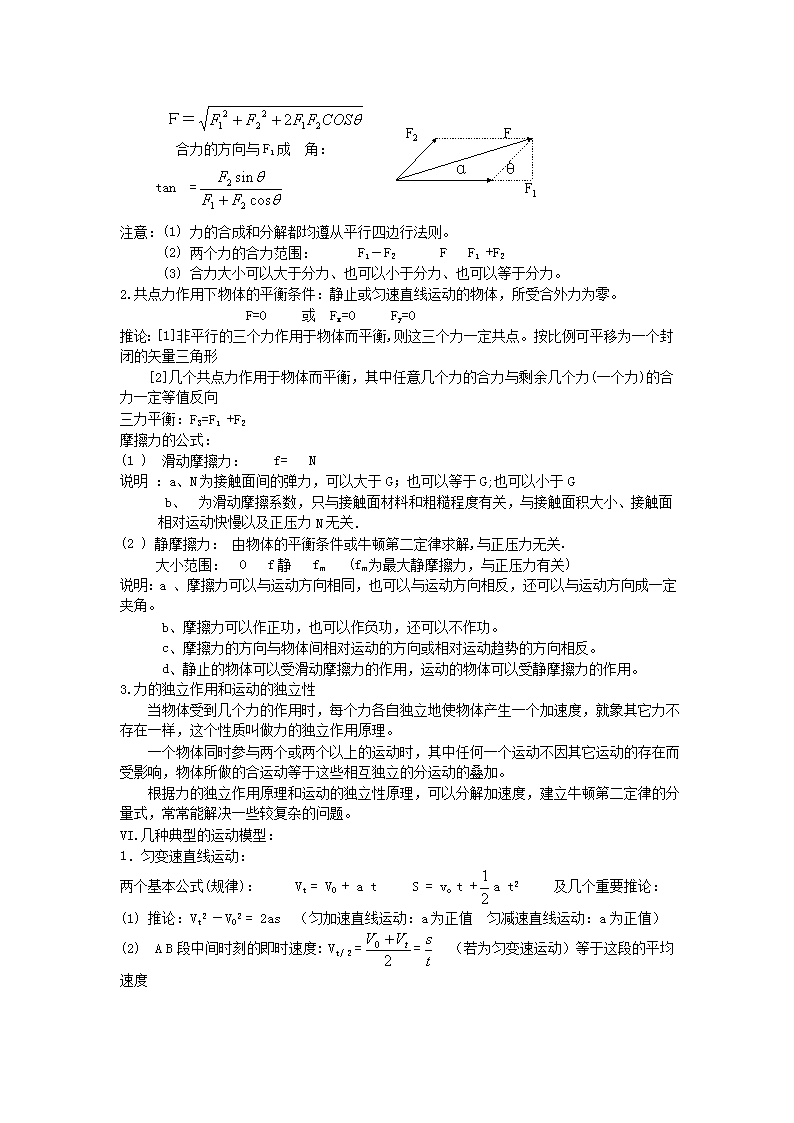
1.力的合成与分解:求F、F2两个共点力的合力的公式:
α
F2
F
F1
θ
F=
合力的方向与F1成a角:
tana=
注意:(1) 力的合成和分解都均遵从平行四边行法则。
(2) 两个力的合力范围: ú F1-F2 ú £ F£ F1 +F2
(3) 合力大小可以大于分力、也可以小于分力、也可以等于分力。
2.共点力作用下物体的平衡条件:静止或匀速直线运动的物体,所受合外力为零。
åF=0 或åFx=0 åFy=0
推论:[1]非平行的三个力作用于物体而平衡,则这三个力一定共点。按比例可平移为一个封闭的矢量三角形
[2]几个共点力作用于物体而平衡,其中任意几个力的合力与剩余几个力(一个力)的合力一定等值反向
三力平衡:F3=F1 +F2
摩擦力的公式:
(1 ) 滑动摩擦力: f= mN
说明 :a、N为接触面间的弹力,可以大于G;也可以等于G;也可以小于G
b、m为滑动摩擦系数,只与接触面材料和粗糙程度有关,与接触面积大小、接触面相对运动快慢以及正压力N无关.
(2 ) 静摩擦力: 由物体的平衡条件或牛顿第二定律求解,与正压力无关.
大小范围: O£ f静£ fm (fm为最大静摩擦力,与正压力有关)
说明:a 、摩擦力可以与运动方向相同,也可以与运动方向相反,还可以与运动方向成一定夹角。
b、摩擦力可以作正功,也可以作负功,还可以不作功。
c、摩擦力的方向与物体间相对运动的方向或相对运动趋势的方向相反。
d、静止的物体可以受滑动摩擦力的作用,运动的物体可以受静摩擦力的作用。
3.力的独立作用和运动的独立性
当物体受到几个力的作用时,每个力各自独立地使物体产生一个加速度,就象其它力不存在一样,这个性质叫做力的独立作用原理。
一个物体同时参与两个或两个以上的运动时,其中任何一个运动不因其它运动的存在而受影响,物体所做的合运动等于这些相互独立的分运动的叠加。
根据力的独立作用原理和运动的独立性原理,可以分解加速度,建立牛顿第二定律的分量式,常常能解决一些较复杂的问题。
VI.几种典型的运动模型:
1.匀变速直线运动:
两个基本公式(规律): Vt = V0 + a t S = vo t +a t2 及几个重要推论:
(1) 推论:Vt2 -V02 = 2as (匀加速直线运动:a为正值 匀减速直线运动:a为正值)
(2) A B段中间时刻的即时速度: Vt/ 2 == (若为匀变速运动)等于这段的平均速度
(3) AB段位移中点的即时速度: Vs/2 =
Vt/ 2 ===== VN £ Vs/2 =
匀速:Vt/2 =Vs/2 ; 匀加速或匀减速直线运动:Vt/2 式,在其他物理量不变的情况下刹车距离就越长,汽车较难停下来。
因此为了提醒司机朋友在公路上行车安全,在公路旁设置“严禁超载、超速及酒后驾车”以及“雨天路滑车辆减速行驶”的警示牌是非常有必要的。
思维方法篇
1.平均速度的求解及其方法应用
① 用定义式: 普遍适用于各种运动;② =只适用于加速度恒定的匀变速直线运动
2.巧选参考系求解运动学问题
3.追及和相遇或避免碰撞的问题的求解方法:
关键:在于掌握两个物体的位置坐标及相对速度的特殊关系。
基本思路:分别对两个物体研究,画出运动过程示意图,列出方程,找出时间、速度、位移的关系。解出结果,必要时进行讨论。
追及条件:追者和被追者v相等是能否追上、两者间的距离有极值、能否避免碰撞的临界条件。
讨论:
1.匀减速运动物体追匀速直线运动物体。
①两者v相等时,S追V被追则还有一次被追上的机会,其间速度相等时,两者距离有一个极大值
2.初速为零匀加速直线运动物体追同向匀速直线运动物体
①两者速度相等时有最大的间距 ②位移相等时即被追上
4.利用运动的对称性解题
5.逆向思维法解题
6.应用运动学图象解题
7.用比例法解题
8.巧用匀变速直线运动的推论解题
①某段时间内的平均速度 = 这段时间中时刻的即时速度
②连续相等时间间隔内的位移差为一个恒量
③位移=平均速度时间
解题常规方法:公式法(包括数学推导)、图象法、比例法、极值法、逆向转变法
2.竖直上抛运动:(速度和时间的对称)
分过程:上升过程匀减速直线运动,下落过程初速为0的匀加速直线运动.
全过程:是初速度为V0加速度为-g的匀减速直线运动。
(1)上升最大高度:H =
(2)上升的时间:t=
(3)上升、下落经过同一位置时的加速度相同,而速度等值反向
(4)上升、下落经过同一段位移的时间相等。
(5)从抛出到落回原位置的时间:t =2
(6)适用全过程S = Vo t -g t2 ; Vt = Vo-g t ; Vt2-Vo2 = -2gS (S、Vt的正、负号的理解)
3.匀速圆周运动
线速度: V===wR=2f R 角速度:w= 追及问题:wAtA=wBtB+n2π
向心加速度: a =2 f2 R
向心力: F= ma = m2 R= mm4n2 R
注意:(1)匀速圆周运动的物体的向心力就是物体所受的合外力,总是指向圆心.
(2)卫星绕地球、行星绕太阳作匀速圆周运动的向心力由万有引力提供。
(3)氢原子核外电子绕原子核作匀速圆周运动的向心力由原子核对核外电子的库仑力提供。
4.平抛运动:匀速直线运动和初速度为零的匀加速直线运动的合运动
(1)运动特点:a、只受重力;b、初速度与重力垂直.尽管其速度大小和方向时刻在改变,但其运动的加速度却恒为重力加速度g,因而平抛运动是一个匀变速曲线运动。在任意相等时间内速度变化相等。
(2)平抛运动的处理方法:平抛运动可分解为水平方向的匀速直线运动和竖直方向的自由落体运动。
水平方向和竖直方向的两个分运动既具有独立性,又具有等时性.
(3)平抛运动的规律:以物体的出发点为原点,沿水平和竖直方向建成立坐标。
ax=0……① ay=0……④
水平方向 vx=v0 ……② 竖直方向 vy=gt……⑤
x=v0t……③ y=½gt2……⑥
Vy = Votgq Vo =Vyctgβ
V = Vo = Vcosq Vy = Vsinβ
在Vo、Vy、V、X、y、t、q七个物理量中,如果 已知其中任意两个,可根据以上公式求出其它五个物理量。
证明:做平抛运动的物体,任意时刻速度的反向延长线一定经过此时沿抛出方向水平总位移的中点。
证:平抛运动示意如图
设初速度为V0,某时刻运动到A点,位置坐标为(x,y ),所用时间为t.
此时速度与水平方向的夹角为,速度的反向延长线与水平轴的交点为,
位移与水平方向夹角为.依平抛规律有:
速度: Vx= V0
Vy=gt
①
位移: Sx= Vot
②
由①②得: 即 ③
所以: ④
④式说明:做平抛运动的物体,任意时刻速度的反向延长线一定经过此时沿抛出方向水总位移的中点。
5.竖直平面内的圆周运动
竖直平面内的圆周运动是典型的变速圆周运动研究物体通过最高点和最低点的情况,并且经常出现临界状态。(圆周运动实例)
①火车转弯
②汽车过拱桥、凹桥3
③飞机做俯冲运动时,飞行员对座位的压力。
④物体在水平面内的圆周运动(汽车在水平公路转弯,水平转盘上的物体,绳拴着的物体在光滑水平面上绕绳的一端旋转)和物体在竖直平面内的圆周运动(翻滚过山车、水流星、杂技节目中的飞车走壁等)。
⑤万有引力——卫星的运动、库仑力——电子绕核旋转、洛仑兹力——带电粒子在匀强磁场中的偏转、重力与弹力的合力——锥摆、(关健要搞清楚向心力怎样提供的)
(1)火车转弯:设火车弯道处内外轨高度差为h,内外轨间距L,转弯半径R。由于外轨略高于内轨,使得火车所受重力和支持力的合力F合提供向心力。
(是内外轨对火车都无摩擦力的临界条件)
①当火车行驶速率V等于V0时,F合=F向,内外轨道对轮缘都没有侧压力
②当火车行驶V大于V0时,F合F向,内轨道对轮缘有侧压力,F合-N'=
即当火车转弯时行驶速率不等于V0时,其向心力的变化可由内外轨道对轮缘侧压力自行调节,但调节程度不宜过大,以免损坏轨道。
(2)无支承的小球,在竖直平面内作圆周运动过最高点情况:
① 临界条件:由mg+T=mv2/L知,小球速度越小,绳拉力或环压力T越小,但T的最小值只能为零,此时小球以重力提供作向心力,恰能通过最高点。即mg=
结论:绳子和轨道对小球没有力的作用(可理解为恰好通过或恰好通不过的速度),只有重力提供作向心力,临界速度V临=
②能过最高点条件:V≥V临(当V≥V临时,绳、轨道对球分别产生拉力、压力)
③不能过最高点条件:V tg物体静止于斜面
╰
α
< tg物体沿斜面加速下滑a=g(sin一cos)
3.轻绳、杆模型
绳只能受拉力,杆能沿杆方向的拉、压、横向及任意方向的力。
杆对球的作用力由运动情况决定
只有=arctg()时才沿杆方向
最高点时杆对球的作用力;最低点时的速度?,杆的拉力?
若小球带电呢?
E
m,q
L
·O
假设单B下摆,最低点的速度VB= mgR=
整体下摆2mgR=mg+
= ; => VB=
所以AB杆对B做正功,AB杆对A做负功
若 V0< ,运动情况为先平抛,绳拉直沿绳方向的速度消失
即是有能量损失,绳拉紧后沿圆周下落机械能守恒。而不能够整个过程用机械能守恒。
求水平初速及最低点时绳的拉力?
换为绳时:先自由落体,在绳瞬间拉紧(沿绳方向的速度消失)有能量损失(即v1突然消失),再v2下摆机械能守恒
例:摆球的质量为m,从偏离水平方向30°的位置由静释放,设绳子为理想轻绳,求:小球运动到最低点A时绳子受到的拉力是多少?
4.超重失重模型
系统的重心在竖直方向上有向上或向下的加速度(或此方向的分量ay)
向上超重(加速向上或减速向下)F=m(g+a);向下失重(加速向下或减速上升)F=m(g-a)
难点:一个物体的运动导致系统重心的运动
1到2到3过程中 (1、3除外)超重状态
绳剪断后台称示数
系统重心向下加速F
m
a
图9
q
斜面对地面的压力?
地面对斜面摩擦力?
导致系统重心如何运动?
铁木球的运动
用同体积的水去补充
5.碰撞模型:特点,①动量守恒;②碰后的动能不可能比碰前大;
③对追及碰撞,碰后后面物体的速度不可能大于前面物体的速度。
◆弹性碰撞:m1v1+m2v2=(1) (2 )
◆一动一静且二球质量相等的弹性正碰:速度交换
大碰小一起向前;质量相等,速度交换;小碰大,向后返。
◆一动一静的完全非弹性碰撞(子弹打击木块模型)
mv0+0=(m+M) =+E损
E损=一=
E损 可用于克服相对运动时的摩擦力做功转化为内能E损=fd相=mg·d相=一
v0
A
B
v
s
M
v0
L
A
B
v0
1
2
A
v0
“碰撞过程”中四个有用推论
弹性碰撞除了遵从动量守恒定律外,还具备:碰前、碰后系统的总动能相等的特征,
设两物体质量分别为m1、m2,碰撞前速度分别为υ1 、υ2,碰撞后速度分别为u1、u2,即有 :
m1υ1 +m2υ2=m1u1+m1u2
m1υ12 +m2υ22=m1u12+m1u22
碰后的速度u1和u2表示为: u1=υ1+υ2
u2=υ1+υ2
推论一:如对弹性碰撞的速度表达式进行分析,还会发现:弹性碰撞前、后,碰撞双方的相对速度大小相等,即}: u2-u1=υ1-υ2
推论二:如对弹性碰撞的速度表达式进一步探讨,当m1=m2时,代入上式得:。即当质量相等的两物体发生弹性正碰时,速度互换。
推论三:完全非弹性碰撞碰撞双方碰后的速度相等的特征,即: u 1=u2
由此即可把完全非弹性碰撞后的速度u1和u2表为: u1=u2=
例3:证明:完全非弹性碰撞过程中机械能损失最大。
证明:碰撞过程中机械能损失表为: △E=m1υ12+m2υ22―m1u12―m2u22
由动量守恒的表达式中得: u2=(m1υ1+m2υ2-m1u1)
代入上式可将机械能的损失△E表为u1的函数为:
△E=-u12-u1+[(m1υ12+m2υ22)-( m1υ1+m2υ2)2]
这是一个二次项系数小于零的二次三项式,显然:当 u1=u2=时,
即当碰撞是完全非弹性碰撞时,系统机械能的损失达到最大值
△Em=m1υ12+m2υ22 -
推论四:碰撞过程中除受到动量守恒以及能量不会增加等因素的制约外,还受到运动的合理性要求的制约,比如,某物体向右运动,被后面物体追及而发生碰撞,被碰物体运动速度只会增大而不应该减小并且肯定大于或者等于(不小于)碰撞物体的碰后速度。
6.人船模型:一个原来处于静止状态的系统,在系统内发生相对运动的过程中,
在此方向遵从动量守恒:mv=MV ms=MS s+S=d s= M/m=Lm/LM
载人气球原静止于高h的高空,气球质量为M,人的质量为m.若人沿绳梯滑至地面,则绳梯至少为多长?
M
m
O
R
S1
S2
20m
7.弹簧振子模型:F=-Kx (X、F、a、v、A、T、f、EK、EP等量的变化规律)水平型和竖直型
8.单摆模型:T=2 (类单摆) 利用单摆测重力加速度
9.波动模型:特点:传播的是振动形式和能量,介质中各质点只在平衡位置附近振动并不随波迁移。
①各质点都作受迫振动, ②起振方向与振源的起振方向相同, ③离源近的点先振动,
④没波传播方向上两点的起振时间差=波在这段距离内传播的时间⑤波源振几个周期波就向外传几个波长。波从一种介质传播到另一种介质,频率不改变, 波速v=s/t=/T=f
波速与振动速度的区别 波动与振动的区别:波的传播方向质点的振动方向(同侧法)
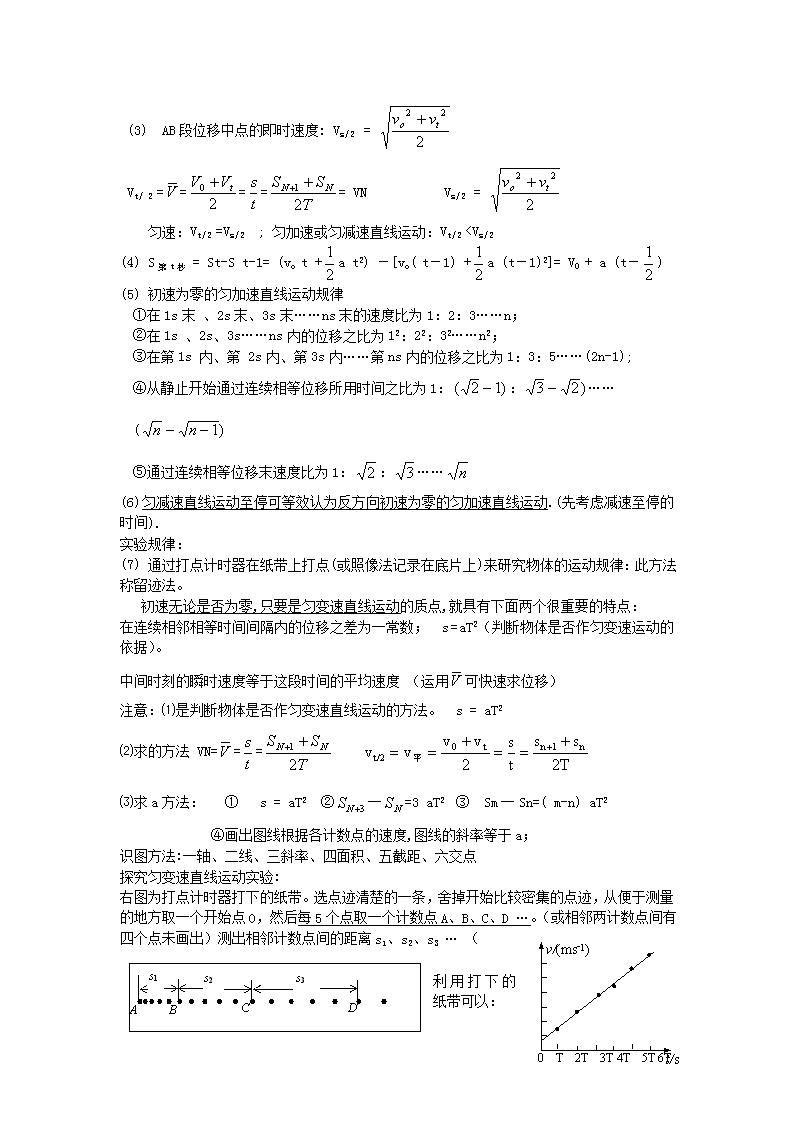
知波速和波形画经过Δt后的波形(特殊点画法和去整留零法)
物理解题方法:如整体法、假设法、极限法、逆向思维法、物理模型法、等效法、物理图像法等.
模型法常常有下面三种情况
(1)物理对象模型:用来代替由具体物质组成的、代表研究对象的实体系统,称为对象模型(也可称为概念模型),即把研究的对象的本身理想化.常见的如“力学”中有质点、刚体、杠杆、轻质弹簧、单摆、弹簧振子、弹性体、绝热物质等;
(2)条件模型:把研究对象所处的外部条件理想化,排除外部条件中干扰研究对象运动变化的次要因素,突出外部条件的本质特征或最主要的方面,从而建立的物理模型称为条件模型.
(3)过程模型:把具体过理过程纯粹化、理想化后抽象出来的一种物理过程,称过程模型
其它的碰撞模型:
v0
A
B
C
1
2
A
A
B
C
动量和能量
1.力的三种效应:
力的瞬时性(产生a)F=ma、运动状态发生变化牛顿第二定律
时间积累效应(冲量)I=Ft、动量发生变化动量定理
空间积累效应(做功)w=Fs动能发生变化动能定理
2.动量观点:动量:p=mv= 冲量:I = F t
动量定理:内容:物体所受合外力的冲量等于它的动量的变化。
公式: F合t = mv’一mv (解题时受力分析和正方向的规定是关键)
I=F合t=F1t1+F2t2+---=p=P末-P初=mv末-mv初
动量守恒定律:内容、守恒条件、不同的表达式及含义:;;
P=P′ (系统相互作用前的总动量P等于相互作用后的总动量P′)
ΔP=0 (系统总动量变化为0)
如果相互作用的系统由两个物体构成,动量守恒的具体表达式为
P1+P2=P1′+P2′ (系统相互作用前的总动量等于相互作用后的总动量)
m1V1+m2V2=m1V1′+m2V2′
ΔP=-ΔP' (两物体动量变化大小相等、方向相反)
实际中应用有:m1v1+m2v2=; 0=m1v1+m2v2 m1v1+m2v2=(m1+m2)v共
原来以动量(P)运动的物体,若其获得大小相等、方向相反的动量(-P),是导致物体静止或反向运动的临界条件。即:P+(-P)=0
注意理解四性:系统性、矢量性、同时性、相对性
矢量性:对一维情况,先选定某一方向为正方向,速度方向与正方向相同的速度取正,反之取负,把矢量运算简化为代数运算。
相对性:所有速度必须是相对同一惯性参照系。
同时性:表达式中v1和v2必须是相互作用前同一时刻的瞬时速度,v1’和v2’必须是相互作用后同一时刻的瞬时速度。
解题步骤:选对象,划过程;受力分析。所选对象和过程符合什么规律?用何种形式列方程;(先要规定正方向)求解并讨论结果。
3.功与能观点:
功W = Fs cosq (适用于恒力功的计算)①理解正功、零功、负功②功是能量转化的量度 W= P·t (p===Fv) 功率:P = (在t时间内力对物体做功的平均功率) P = Fv
(F为牵引力,不是合外力;V为即时速度时,P为即时功率;V为平均速度时,P为平均功率; P一定时,F与V成正比)
动能: EK= 重力势能Ep = mgh (凡是势能与零势能面的选择有关)
动能定理:外力对物体所做的总功等于物体动能的变化(增量)。
公式: W合= W合=W1+ W2+…+Wn= DEk = Ek2 一Ek1 =
机械能守恒定律:机械能=动能+重力势能+弹性势能(条件:系统只有内部的重力或弹力做功).
守恒条件:(功角度)只有重力,弹力做功;(能转化角度)只发生动能与势能之间的相互转化。
“只有重力做功”不等于“只受重力作用”。在该过程中,物体可以受其它力的作用,只要这些力不做功,或所做功的代数和为零,就可以认为是“只有重力做功”。
列式形式:E1=E2(先要确定零势面) P减(或增)=E增(或减) EA减(或增)=EB增(或减)
mgh1 + 或者 DEp减 = DEk增
除重力和弹簧弹力做功外,其它力做功改变机械能;滑动摩擦力和空气阻力做功W=fd路程E内能(发热)
4.功能关系:功和能的关系:功是能量转化的量度。有两层含义:
(1)做功的过程就是能量转化的过程,(2)做功的多少决定了能转化的数量,即:功是能量转化的量度
强调:功是一种过程量,它和一段位移(一段时间)相对应;而能是一种状态量,它与一个时刻相对应。两者的单位是相同的(都是J),但不能说功就是能,也不能说“功变成了能”。
做功的过程是物体能量的转化过程,做了多少功,就有多少能量发生了变化,功是能量转化的量度.
(1)动能定理
合外力对物体做的总功等于物体动能的增量.即
(2)与势能相关力做功导致与之相关的势能变化
重力
重力做正功,重力势能减少;重力做负功,重力势能增加.重力对物体所做的功等于物体重力势能增量的负值.即WG=EP1—EP2= —ΔEP
弹簧弹力
弹力做正功,弹性势能减少;弹力做负功,弹性势能增加.
弹力对物体所做的功等于物体弹性势能增量的负值.即W弹力=EP1—EP2= —ΔEP
分子力
分子力对分子所做的功=分子势能增量的负值
电场力
电场力做正功,电势能减少;电场力做负功,电势能增加。注意:电荷的正负及移动方向
电场力对电荷所做的功=电荷电势能增量的负值
(3)机械能变化原因
除重力(弹簧弹力)以外的的其它力对物体所做的功=物体机械能的增量即WF=E2—E1=ΔE
当除重力(或弹簧弹力)以外的力对物体所做的功为零时,即机械能守恒
(4)机械能守恒定律
在只有重力和弹簧的弹力做功的物体系内,动能和势能可以互相转化,但机械能的总量保持不变.即 EK2+EP2 = EK1+EP1, 或 ΔEK = —ΔEP
(5)静摩擦力做功的特点
(1)静摩擦力可以做正功,也可以做负功,还可以不做功;
(2)在静摩擦力做功的过程中,只有机械能的互相转移,而没有机械能与其他形式的能的转化,静摩擦力只起着传递机械能的作用;
(3)相互摩擦的系统内,一对静摩擦力对系统所做功的和总是等于零.
(6)滑动摩擦力做功特点
“摩擦所产生的热”
(1)滑动摩擦力可以做正功,也可以做负功,还可以不做功;
=滑动摩擦力跟物体间相对路程的乘积,即一对滑动摩擦力所做的功
(2)相互摩擦的系统内,一对滑动摩擦力对系统所做功的和总表现为负功,
其大小为:W= —fS相对=Q 对系统做功的过程中,系统的机械能转化为其他形式的能,
(S相对为相互摩擦的物体间的相对位移;若相对运动有往复性,则S相对为相对运动的路程)
(7)一对作用力与反作用力做功的特点
(1)作用力做正功时,反作用力可以做正功,也可以做负功,还可以不做功;作用力做负功、不做功时,反作用力亦同样如此.
(2)一对作用力与反作用力对系统所做功的总和可以是正功,也可以是负功,还可以零.
(8)热学
外界对气体做功
外界对气体所做的功W与气体从外界所吸收的热量Q的和=气体内能的变化W+Q=△U (热力学第一定律,能的转化守恒定律)
(9)电场力做功
W=qu=qEd=F电SE (与路径无关)
(10)电流做功
(1)在纯电阻电路中(电流所做的功率=电阻发热功率)
(2) 在电解槽电路中,电流所做的功率=电阻发热功率+转化为化学能的的功率
(3) 在电动机电路中,电流所做的功率=电阻发热功率与输出的机械功率之和
P电源t =uIt= +E其它;W=IUt >
(11)安培力做功
安培力所做的功对应着电能与其它形式的能的相互转化,即W安=△E电,
安培力做正功,对应着电能转化为其他形式的能(如电动机模型);
克服安培力做功,对应着其它形式的能转化为电能(如发电机模型);
且安培力作功的绝对值,等于电能转化的量值, W=F安d=BILd 内能(发热)
(12)洛仑兹力永不做功
洛仑兹力只改变速度的方向
(13)光学
光子的能量: E光子=hγ;一束光能量E光=N×hγ(N指光子数目)
在光电效应中,光子的能量hγ=W+
(14)原子物理
原子辐射光子的能量hγ=E初—E末,原子吸收光子的能量hγ= E末—E初
爱因斯坦质能方程:E=mc2
(15)能量转化和守恒定律
对于所有参与相互作用的物体所组成的系统,其中每一个物体的能量的数值及形式都可能发生变化,但系统内所有物体的各种形式能量的总合保持不变
功和能的关系贯穿整个物理学。现归类整理如下:常见力做功与对应能的关系
常见的几种力做功
能量关系
数量关系式
力的种类
做功的正负
对应的能量
变化情况
①重力mg
+
重力势能EP
减小
mgh=–ΔEP
–
增加
②弹簧的弹力kx
+
弹性势能E弹性
减小
W弹=–ΔE弹性
–
增加
③分子力F分子
+
分子势能E分子
减小
W分子力=–ΔE分子
–
增加
④电场力Eq
+
电势能E电势
减小
qU =–ΔE电势
–
增加
⑤滑动摩擦力f
–
内能Q
增加
fs相对= Q
⑥感应电流的安培力F安培
–
电能E电
增加
W安培力=ΔE电
⑦合力F合
+
动能Ek
增加
W合=ΔEk
–
减小
⑧重力以外的力F
+
机械能E机械
增加
WF=ΔE机械
–
减小
5.求功的方法:单位:J ev=1.9×10-19J 度=kwh=3.6×106J 1u=931.5Mev
⊙力学:① W=Fscosα ② W= P·t (p===Fv)
③动能定理 W合=W1+ W2+…+Wn=ΔEK=E末-E初 (W可以不同的性质力做功)
④功是能量转化的量度(易忽视)主要形式有: 贯穿整个高中物理的主线
重力的功------量度------重力势能的变化 电场力的功-----量度------电势能的变化
分子力的功-----量度------分子势能的变化 合外力的功------量度-------动能的变化
除重力和弹簧弹力做功外,其它力做功改变机械能; 摩擦力和空气阻力做功W=fd路程E内能(发热)
与势能相关的力做功特点:如重力,弹力,分子力,电场力它们做功与路径无关,只与始末位置有关.
“功是能量转化的量度”这一基本概念理解。
⑴物体动能的增量由外力做的总功来量度:W外=ΔEk,这就是动能定理。
⑵物体重力势能的增量由重力做的功来量度:WG= -ΔEP,这就是势能定理。
⑶物体机械能的增量由重力以外的其他力做的功来量度:W其=ΔE机,(W其表示除重力以外的其它力做的功),这就是机械能定理。
⑷当W其=0时,说明只有重力做功,所以系统的机械能守恒。
⑸一对互为作用力反作用力的摩擦力做的总功,用来量度该过程系统由于摩擦而减小的机械能,也就是系统增加的内能。f d=Q(d为这两个物体间相对移动的路程)。
⊙热学: ΔE=Q+W(热力学第一定律)
⊙电学: WAB=qUAB=F电dE=qEdE 动能(导致电势能改变)
W=QU=UIt=I2Rt=U2t/R Q=I2Rt
E=I(R+r)=u外+u内=u外+Ir P电源t =uIt+E其它 P电源=IE=I U +I2Rt
⊙磁学:安培力功W=F安d=BILd 内能(发热)
⊙光学:单个光子能量E=hγ 一束光能量E总=Nhγ(N为光子数目)
光电效应=hγ-W0 跃迁规律:hγ=E末-E初 辐射或吸收光子
⊙原子:质能方程:E=mc2 ΔE=Δmc2 注意单位的转换换算
汽车的启动问题: 具体变化过程可用如下示意图表示.关键是发动机的功率是否达到额定功率,
恒定功
率启动
速度V↑F=↓
a=
当a=0即F=f时,v达到最大vm
保持vm匀速
∣→→→变加速直线运动→→→→→→→∣→→→→匀速直线运动→→……
恒定加速度启动
a定=即F一定
P↑=F定v↑即P随v的增大而增大
当a=0时,v达到最大vm,此后匀速
当P=P额时
a定=≠0,
v还要增大
F=
a=
∣→→匀加速直线运动→→→→∣→→→变加速(a↓)运动→→→→→∣→匀速运动→
(1)若额定功率下起动,则一定是变加速运动,因为牵引力随速度的增大而减小.求解时不能用匀变速运动的规律来解.
(2)特别注意匀加速起动时,牵引力恒定.当功率随速度增至预定功率时的速度(匀加速结束时的速度),并不是车行的最大速度.此后,车仍要在额定功率下做加速度减小的加速运动(这阶段类同于额定功率起动)直至a=0时速度达到最大.
动量守恒:
内容:相互作用的物体系统,如果不受外力,或它们所受的外力之和为零,它们的总动量保持不变。
(研究对象:相互作用的两个物体或多个物体所组成的系统)
守恒条件:①系统不受外力作用。 (理想化条件)
②系统受外力作用,但合外力为零。
③系统受外力作用,合外力也不为零,但合外力远小于物体间的相互作用力。
④系统在某一个方向的合外力为零,在这个方向的动量守恒。
⑤全过程的某一阶段系统受合外力为零,该阶段系统动量守恒,
即:原来连在一起的系统匀速或静止(受合外力为零),分开后整体在某阶段受合外力仍为零,可用动量守恒。
不同的表达式及含义:;; (各种表达式的中文含义)
实际中有应用:m1v1+m2v2=; 0=m1v1+m2v2 m1v1+m2v2=(m1+m2)v共
注意理解四性:系统性、矢量性、同时性、相对性
系统性:研究对象是某个系统、研究的是某个过程
矢量性:不在同一直线上时进行矢量运算;在同一直线上时,取正方向,引入正负号转化为代数运算。
同时性:v1、v2是相互作用前同一时刻的速度,v1'、v2'是相互作用后同一时刻的速度。
同系性:各速度必须相对同一参照系
解题步骤:选对象,划过程;受力分析.所选对象和过程符合什么规律?用何种形式列方程(先要规定正方向)求解并讨论结果。 历年高考中涉及动量守量模型题:
一质量为M的长木板静止在光滑水平桌面上.一质量为m的小滑块以水平速度v0从长木板的一端开始在木板上滑动,直到离开木板.滑块刚离开木板时速度为V0/3,若把此木板固定在水平面上,其它条件相同,求滑块离开木板时速度?
3x0
x0
A
O
m
1996年全国广东(24题)
1995年全国广东(30题压轴题)
1997年全国广东(25题轴题12分)
1998年全国广东(25题轴题12分)
试在下述简化情况下由牛顿定律导出动量守恒定律的表达式:系统是两个质点,相互作用力是恒力,不受其他力,沿直线运动要求说明推导过程中每步的根据,以及式中各符号和最后结果中各项的意义。
质量为M的小船以速度V0行驶,船上有两个质量皆为m的小孩a和b,分别静止站在船头和船尾. 现小孩a沿水平方向以速率v(相对于静止水面)向前跃入水中,然后小孩b沿水平方向以同一速率v(相对于静止水面)向后跃入水中. 求小孩b跃出后小船的速度.
1999年全国广东(20题12分)
2000年全国广东(22压轴题)
2001年广东河南(17题12分)
M 2 1 N
P Q
B
2002年广东(19题)
2003年广东(19、20题)
2004年广东(15、17题)
A
H
O/
O
B
L
P
C
2005年广东(18题)
2006年广东(16、18题)
2007年广东(17题)
碰撞模型:特点和注意点:
①动量守恒;②碰后的动能不可能碰前大;
③对追及碰撞,碰后后面物体的速度不可能大于前面物体的速度。
m1v1+m2v2= (1)
(2 )
记住这个结论给解综合题带来简便。通过讨论两质量便可。
“一动一静”弹性碰撞规律:即m2v2=0 ;=0 代入(1)、(2)式
动量守恒:m1v1+m2v2=m1v1'+m2v2' 动能守恒:m1v12+m2v22=m1v1' 2+m2v2' 2
联立可解:v1'=(主动球速度下限) v2'=(被碰球速度上限)
讨论(1):
当m1>m2时,v1'>0,v2'>0 v1′与v1方向一致; 当m1>>m2时,v1'≈v1,v2'≈2v1 (高射炮打蚊子)
当m1=m2时,v1'=0,v2'=v1 即m1与m2交换速度
当m10 v2′与v1同向;当m1<>m2时,v2'≈2v1
B.初动量p1一定,由p2'=m2v2'=,可见,当m1< P=IU>
E=I(R+r)=u外+u内=u外+Ir P电源=uIt= +E其它 P电源=IE=I U +I2Rt
单位:J ev=1.9×10-19J 度=kwh=3.6×106J 1u=931.5Mev
电路中串并联的特点和规律应相当熟悉
1、联电路和并联电路的特点(见下表):
串联电路
并联电路
两个基本特点
电压
U=U1+U2+U3+……
U=U1=U2=U3=……
电流
I=I1=I2=I3=……
I=I1+I2+I3+……
三个重要性质
电阻
R=R1+R2+R3+……
1/R=1/R1+1/R2+1/R3+……
R=
电压
U/R=U1/R1=U2/R2=U3/R3=……=I
IR=I1R1=I2R2=I3R3=……=U
功率
P/R=P1/R1=P2/R2=P3/R3=……=I2
PR=P1R1=P2R2=P3R3=……=U2
2、记住结论:①并联电路的总电阻小于任何一条支路的电阻;②当电路中的任何一个电阻的阻值增大时,电路的总电阻增大,反之则减小。
3、电路简化原则和方法
①原则:a、无电流的支路除去;b、电势相等的各点合并;c、理想导线可任意长短;d、理想电流表电阻为零,理想电压表电阻为无穷大;e、电压稳定时电容器可认为断路
②方法:a、电流分支法:先将各节点用字母标上,判定各支路元件的电流方向(若无电流可假设在总电路两端加上电压后判定),按电流流向,自左向右将各元件,结点,分支逐一画出,加工整理即可;b、等势点排列法:标出节点字母,判断出各结点电势的高低(电路无电压时可先假设在总电路两端加上电压),将各节点按电势高低自左向右排列,再将各节点间的支路画出,然后加工整理即可。注意以上两种方法应结合使用。
4、滑动变阻器的几种连接方式
a、限流连接:如图,变阻器与负载元件串联,电路中总电压为U,此时负载Rx的电压调节范围红为,其中Rp起分压作用,一般称为限流电阻,滑线变阻器的连接称为限流连接。
b 、分压连接:如图,变阻器一部分与负载并联,当滑片滑动时,两部分电阻丝的长度发生变化,对应电阻也发生变化,根据串联电阻的分压原理,其中UAP= ,当滑片P自A端向B端滑动时,负载上的电压范围为0~U,显然比限流时调节范围大,R起分压作用,滑动变阻器称为分压器,此连接方式为分压连接。
一般说来,当滑动变阻器的阻值范围比用电器的电阻小得多时,做分压器使用好;反之做限流器使用好。
5、含电容器的电路:分析此问题的关键是找出稳定后,电容器两端的电压。
6、电路故障分析:电路不能正常工作,就是发生了故障,要求掌握断路、短路造成的故障分析。
路端电压随电流的变化图线中注意坐标原点是否都从零开始
电路动态变化分析(高考的热点)各灯、表的变化情况
1程序法:局部变化R总I总先讨论电路中不变部分(如:r)最后讨论变化部分
局部变化再讨论其它
2直观法:
①任一个R增必引起通过该电阻的电流减小,其两端电压UR增加.(本身电流、电压)
②任一个R增必引起与之并联支路电流I并增加; 与之串联支路电压U串减小(称串反并同法)
当R=r时,电源输出功率最大为Pmax=E2/4r而效率只有50%,
路端电压跟负载的关系
(1)路端电压:外电路的电势降落,也就是外电路两端的电压,通常叫做路端电压。
(2)路端电压跟负载的关系
当外电阻增大时,电流减小,路端电压增大;当外电阻减小时,电流增大,路端电压减小。
U
U
r=0
I
O
E
U内=I1r
U=I1R
定性分析:R↑→I(=)↓→Ir↓→U(=E-Ir)↑
R↓→I(=)↑→Ir↑→U(=E-Ir)↓
∞
特例:
0
0
外电路断路:R↑→I↓→Ir↓→U=E。
0
外电路短路:R↓→I(=)↑→Ir(=E)↑→U=0。
图象描述:路端电压U与电流I的关系图象是一条向下倾斜的直线。U—I图象如图所示。直线与纵轴的交点表示电源的电动势E,直线的斜率的绝对值表示电源的内阻。
闭合电路中的功率
(1)闭合电路中的能量转化qE=qU外+qU内
在某段时间内,电能提供的电能等于内、外电路消耗的电能的总和。
电源的电动势又可理解为在电源内部移送1C电量时,电源提供的电能。
(2)闭合电路中的功率:EI=U外I+U内I EI=I2R+I2r
说明电源提供的电能只有一部分消耗在外电路上,转化为其他形式的能,另一部分消耗在内阻上,转化为内能。
(3)电源提供的电功率:又称之为电源的总功率。P=EI=
R↑→P↓,R→∞时,P=0。 R↓→P↑,R→0时,Pm=。
(4)外电路消耗的电功率:又称之为电源的输出功率。P=U外I
定性分析:I= U外=E-Ir=
从这两个式子可知,R很大或R很小时,电源的输出功率均不是最大。
P
R
O
U
I
O
R1 r R2
R=r
E
E/r
E/2r
E/2
定量分析:P外=U外I==(当R=r时,电源的输出功率为最大,P外max=)
图象表述:
从P-R图象中可知,当电源的输出功率小于最大输出功率时,对应有两个外电阻R1、R2时电源的输出功率相等。可以证明,R1、R2和r必须满足:r=。
(5)内电路消耗的电功率:是指电源内电阻发热的功率。
P内=U内I= R↑→P内↓,R↓→P内↑。
(6)电源的效率:电源的输出功率与总功率的比值。η==
当外电阻R越大时,电源的效率越高。当电源的输出功率最大时,η=50%。
电学实验专题
测电动势和内阻
(1)直接法:外电路断开时,用电压表测得的电压U为电动势E ;U=E
(2)通用方法:AV法测要考虑表本身的电阻,有内外接法;
①单一组数据计算,误差较大
②应该测出多组(u,I)值,最后算出平均值
③
作图法处理数据,(u,I)值列表,在u--I图中描点,最后由u--I图线求出较精确的E和r。
(3)特殊方法
(一)即计算法:画出各种电路图
(一个电流表和两个定值电阻)
(一个电流表及一个电压表和一个滑动变阻器)
(一个电压表和两个定值电阻)
(二)测电源电动势ε和内阻r有甲、乙两种接法,如图
甲法中所测得ε和r都比真实值小,ε/r测=ε测/r真;
乙法中,ε测=ε真,且r测= r+rA。
(三)电源电动势ε也可用两阻值不同的电压表A、B测定,单独使用A表时,读数是UA,单独使用B表时,读数是UB,用A、B两表测量时,读数是U,则ε=UAUB/(UA-U)。
电阻的测量
AV法测:要考虑表本身的电阻,有内外接法;多组(u,I)值,列表由u--I图线求。怎样用作图法处理数据
欧姆表测:测量原理
两表笔短接后,调节Ro使电表指针满偏,得 Ig=E/(r+Rg+Ro)
接入被测电阻Rx后通过电表的电流为 Ix=E/(r+Rg+Ro+Rx)=E/(R中+Rx)
由于Ix与Rx对应,因此可指示被测电阻大小
使用方法:机械调零、选择量程(大到小)、欧姆调零、测量读数时注意挡位(即倍率)、拨off挡。
注意:测量电阻时,要与原电路断开,选择量程使指针在中央附近,每次换挡要重新短接欧姆调零。
电桥法测:
半偏法测表电阻: 断s2,调R1使表满偏; 闭s2,调R2使表半偏.则R表=R2;
G
R2
S2
R1
S1
R1
S
V
R2
一、测量电路( 内、外接法 ) 记忆决调 “内”字里面有一个“大”字
类型
电路图
R测与R真比较
条件
计算比较法
己知Rv、RA及Rx大致值时
内
A
V
R大
R测==RX+RA > RX
适于测大电阻
Rx >
外
A
V
R小
R测=n倍的Rx
通电前调到最大
调压
0~E
0~
电压变化范围大
要求电压
从0开始变化
Rx比较大、R滑 比较小
R滑全>Rx/2
通电前调到最小
以“供电电路”来控制“测量电路”:采用以小控大的原则
电路由测量电路和供电电路两部分组成,其组合以减小误差,调整处理数据两方便
R滑唯一:比较R滑与Rx 控制电路
Rx
相关文档
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看