

- 68.33 KB
- 2021-05-13 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
高考数学考点归纳之参数方程
一、基础知识
1.曲线的参数方程
在平面直角坐标系中,如果曲线上任意一点的坐标 x,y 都是某个变数 t 的函数
x=ft,
y=gt,
并且对于 t 的每一个允许值,由这个方程组所确定的点 M(x,y)都在这条曲线上,
那么这个方程组就叫做这条曲线的参数方程,联系变数 x,y 的变数 t 叫做参变数,简称参
数.
相对于参数方程而言,直接给出点的坐标间关系的方程 F(x,y)=0 叫做普通方程.
2.参数方程和普通方程的互化
(1)参数方程化普通方程:利用两个方程相加、减、乘、除或者代入法消去参数.
(2)普通方程化参数方程:如果 x=f(t),把它代入普通方程,求出另一个变数与参数的
关系 y=g(t),则得曲线的参数方程 x=ft,
y=gt.
3.直线、圆、椭圆的参数方程
(1)过点 M(x0,y0),倾斜角为α的直线 l 的参数方程为 x=x0+tcos α,
y=y0+tsin α
(t 为参数).
直线参数方程的标准形式的应用
过点 M0(x0,y0),倾斜角为α的直线 l 的参数方程是 x=x0+tcos α,
y=y0+tsin α.
若 M1,M2 是 l 上
的两点,其对应参数分别为 t1,t2,则
①|M1M2|=|t1-t2|.
②若线段 M1M2 的中点 M 所对应的参数为 t,则 t=t1+t2
2
,中点 M 到定点 M0 的距离|MM0|
=|t|=|t1+t2
2 |.
③若 M0 为线段 M1M2 的中点,则 t1+t2=0.
④|M0M1||M0M2|=|t1t2|.
(2)圆心在点 M0(x0,y0),半径为 r 的圆的参数方程为 x=x0+rcos θ,
y=y0+rsin θ
(θ为参数).
(3)椭圆x2
a2
+y2
b2
=1(a>b>0)的参数方程为 x=acos φ,
y=bsin φ
(φ为参数).
考点一 参数方程与普通方程的互化
[典例] 已知直线 l 的参数方程为 x=a-2t,
y=-4t
(t 为参数),圆 C 的参数方程为
x=4cos θ,
y=4sin θ
(θ为参数).
(1)求直线 l 和圆 C 的普通方程;
(2)若直线 l 与圆 C 有公共点,求实数 a 的取值范围.
[解] (1)直线 l 的普通方程为 2x-y-2a=0,
圆 C 的普通方程为 x2+y2=16.
(2)因为直线 l 与圆 C 有公共点,
故圆 C 的圆心到直线 l 的距离 d=|-2a|
5
≤4,
解得-2 5≤a≤2 5.
即实数 a 的取值范围为[-2 5,2 5 ].
[解题技法] 将参数方程化为普通方程的方法
将参数方程化为普通方程,需要根据参数方程的结构特征,选取适当的消参方法.常见
的消参方法有:代入消参法、加减消参法、平方消参法等,对于含三角函数的参数方程,常
利用同角三角函数关系式消参(如 sin2θ+cos2θ=1 等).
[提醒] 将参数方程化为普通方程时,要注意两种方程的等价性,防止增解.
[题组训练]
1.将下列参数方程化为普通方程.
(1)
x=1
2
et+e-t,
y=1
2
et-e-t (t 为参数).
(2)
x=2tan2θ,
y=2tan θ
(θ为参数).
解:(1)由参数方程得 et=x+y,e-t=x-y,
所以(x+y)(x-y)=1,即 x2-y2=1.
(2)因为曲线的参数方程为 x=2tan2θ,
y=2tan θ
(θ为参数),
①
②
由 y=2tan θ,得 tan θ=y
2
,代入①得 y2=2x.
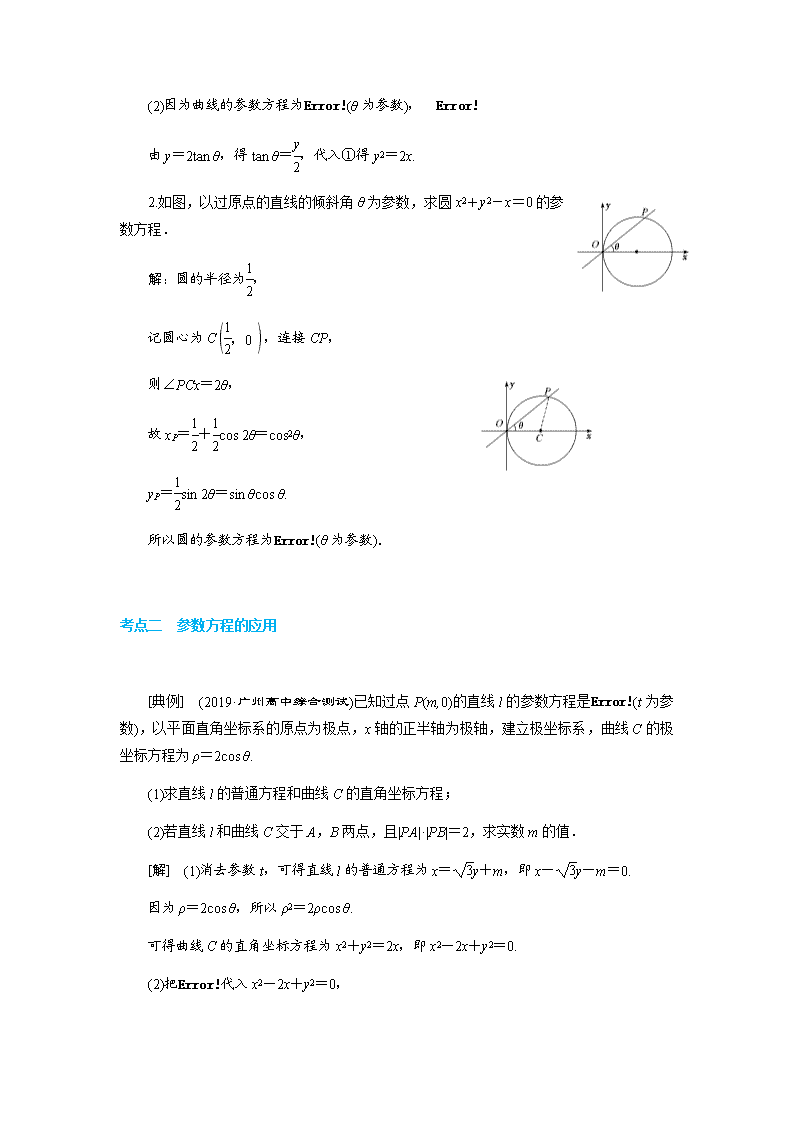
2.如图,以过原点的直线的倾斜角θ为参数,求圆 x2+y2-x=0 的参
数方程.
解:圆的半径为1
2
,
记圆心为 C
1
2
,0 ,连接 CP,
则∠PCx=2θ,
故 xP=1
2
+1
2cos 2θ=cos2θ,
yP=1
2sin 2θ=sin θcos θ.
所以圆的参数方程为 x=cos2θ,
y=sin θcos θ
(θ为参数).
考点二 参数方程的应用
[ 典 例 ] (2019· 广 州 高 中 综 合 测 试 ) 已 知 过 点 P(m,0) 的 直 线 l 的 参 数 方 程 是
x=m+ 3
2 t,
y=1
2t
(t 为参数),以平面直角坐标系的原点为极点,x 轴的正半轴为极轴,建立
极坐标系,曲线 C 的极坐标方程为ρ=2cos θ.
(1)求直线 l 的普通方程和曲线 C 的直角坐标方程;
(2)若直线 l 和曲线 C 交于 A,B 两点,且|PA|·|PB|=2,求实数 m 的值.
[解] (1)消去参数 t,可得直线 l 的普通方程为 x= 3y+m,即 x- 3y-m=0.
因为ρ=2cos θ,所以ρ2=2ρcos θ.
可得曲线 C 的直角坐标方程为 x2+y2=2x,即 x2-2x+y2=0.
(2)把
x=m+ 3
2 t,
y=1
2t
代入 x2-2x+y2=0,
得 t2+( 3m- 3)t+m2-2m=0.
由Δ>0,得-11,
即α∈
π
2
,3π
4 或α∈
π
4
,π
2 .
综上,α的取值范围是
π
4
,3π
4 .
(2)l 的参数方程为 x=tcos α,
y=- 2+tsin α
t 为参数,π
4<α<3π
4 .
设 A,B,P 对应的参数分别为 tA,tB,tP,
则 tP=tA+tB
2
,且 tA,tB 满足 t2-2 2tsin α+1=0.
于是 tA+tB=2 2sin α,tP= 2sin α.
又点 P 的坐标(x,y)满足 x=tPcos α,
y=- 2+tPsin α,
所以点 P 的轨迹的参数方程是
x= 2
2 sin 2α,
y=- 2
2
- 2
2 cos 2α
α为参数,π
4<α<3π
4 .
7.(2019·洛阳第一次统考)在直角坐标系 xOy 中,曲线 C1 的参数方程为 x=t,
y=m+t
(t
为参数,m∈R),以原点 O 为极点,x 轴的非负半轴为极轴建立极坐标系,曲线 C2 的极坐标
方程为ρ2= 3
3-2cos2θ
(0≤θ≤π).
(1)写出曲线 C1 的普通方程和曲线 C2 的直角坐标方程;
(2)已知点 P 是曲线 C2 上一点,若点 P 到曲线 C1 的最小距离为 2 2,求 m 的值.
解:(1)由曲线 C1 的参数方程消去参数 t,可得 C1 的普通方程为 x-y+m=0.
由曲线 C2 的极坐标方程得 3ρ2-2ρ2cos2θ=3,θ∈[0,π],
∴曲线 C2 的直角坐标方程为x2
3
+y2=1(0≤y≤1).
(2)设曲线 C2 上任意一点 P 的坐标为( 3cos α,sin α),α∈[0,π],
则点 P 到曲线 C1 的距离 d=| 3cos α-sin α+m|
2
=|2cos α+π
6 +m|
2
.
∵α∈[0,π],∴cos α+π
6 ∈ -1, 3
2 ,2cos α+π
6 ∈[-2, 3 ],
当 m+ 3<0 时,m+ 3=-4,即 m=-4- 3.
当 m-2>0 时,m-2=4,即 m=6.
当 m+ 3≥0,m-2≤0,即- 3≤m≤2 时,dmin=0,不合题意,舍去.
综上,m=-4- 3或 m=6.
8.已知直线 l 的参数方程为 x=1+tcos θ,
y=tsin θ
(t 为参数),曲线 C 的参数方程为
x= 3cos α,
y=sin α
(α为参数),且直线 l 交曲线 C 于 A,B 两点.
(1)将曲线 C 的参数方程化为普通方程,并求θ=π
3
时,|AB|的值;
(2)已知点 P(1,0),求当直线 l 的倾斜角θ变化时,|PA|·|PB|的取值范围.
解:(1)曲线 C 的普通方程为x2
3
+y2=1.
当θ=π
3
时,直线 l 的参数方程为
x=1+1
2t
y= 3
2 t
(t 为参数),
将 l 的参数方程代入x2
3
+y2=1,得 5t2+2t-4=0,
设 A,B 对应的参数分别为 t1,t2,
则 t1+t2=-2
5
,t1t2=-4
5
,
所以|AB|=|t1-t2|= t1+t22-4t1t2=2 21
5 .
(2)将直线 l 的参数方程 x=1+tcos θ,
y=tsin θ
代入x2
3
+y2=1,
得(1+2sin2θ)t2+2tcos θ-2=0,
设 A,B 对应的参数分别为 t3,t4,则 t3t4= -2
1+2sin2θ
,
则|PA|·|PB|=-t3t4= 2
1+2sin2θ
.
又 0≤sin2θ≤1,所以2
3
≤|PA|·|PB|≤2,
所以|PA|·|PB|的取值范围是
2
3
,2 .
相关文档
- 2020-2021学年高考数学(理)考点:直线2021-05-1310页
- 高考数学考点归纳之 直线、平面垂2021-05-1312页
- 2020-2021年高考文言文解题技巧概2021-05-139页
- 2020-2021年高考生物一轮复习知识2021-05-1310页
- 2020年高考真题——理综(全国卷Ⅲ) W2021-05-1348页
- 2021年高考语文一轮复习论述类文本2021-05-1310页
- 高考数学考点归纳之导数的概念及运2021-05-1315页
- 2021年高考语文一轮复习古诗文阅读2021-05-137页
- 2020年高考真题——理科数学(全国卷2021-05-1324页
- 2020年高考英语模拟试题及答案(一)2021-05-1322页