

- 4.57 MB
- 2021-05-25 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
第六章
考 纲 要 求
考 情 分 析
功和功率
Ⅱ
1.命题规律
近几年高考既有对本章内容的单独考查,也有与牛顿运动定律、曲线运动、电磁学等内容相结合的综合考查,对本章单独考查的题目多为选择题。
2.考查热点
将本章内容与其他知识相结合,与实际生产、生活和现代科技相结合进行命题的趋势较强,在复习中应侧重对基础知识的理解和应用。
3.特别提醒
《考试大纲》将选修35调整为必考内容,使得动量和能量知识结合更紧密,整个力学模块更系统、更完备。在2018届高考复习过程中,应对动量知识给予更多关注。
动能和动能定理
Ⅱ
重力做功与重力势能
Ⅱ
功能关系、机械能守恒定律及其应用
Ⅱ
动量、动量定理、动量守恒定律及其应用
Ⅱ
弹性碰撞和非弹性碰撞
Ⅰ
实验五:探究动能定理
实验六:验证机械能守恒定律
实验七:验证动量守恒定律
第27课时 功和功率(双基落实课)
[命题者说] 功和功率是高中物理的基本概念。高考常考查功和功率的计算。复习本课时应注意掌握功的几种计算方法、平均功率和瞬时功率的分析、机车启动问题等。
一、功的理解和正负判断
1.做功的两个要素:力和物体在力的方向上发生的位移。
2.公式:W=Flcos α
(1)α是力与位移方向之间的夹角,l是物体对地的位移。
(2)该公式只适用于恒力做功。
3.功的正负(曲线运动中α是力与速度方向之间的夹角)
夹角
功的正负
α<90°
力对物体做正功
α=90°
力对物体不做功
α>90°
力对物体做负功或说成物体克服这个力做了功
[小题练通]
1.判断正误
(1)只要物体受力且发生位移,则力对物体一定做功。(×)
(2)如果一个力阻碍了物体的运动,则这个力一定对物体做负功。(√)
(3)摩擦力可能对物体做正功、负功,也可能不做功。(√)
(4)作用力做正功时,反作用力一定做负功。(×)
(5)力对物体做功的正负是由力和位移间的夹角大小决定的。(√)
(6)力始终垂直物体的运动方向,则该力对物体不做功。(√)
(7)摩擦力对物体一定做负功。(×)
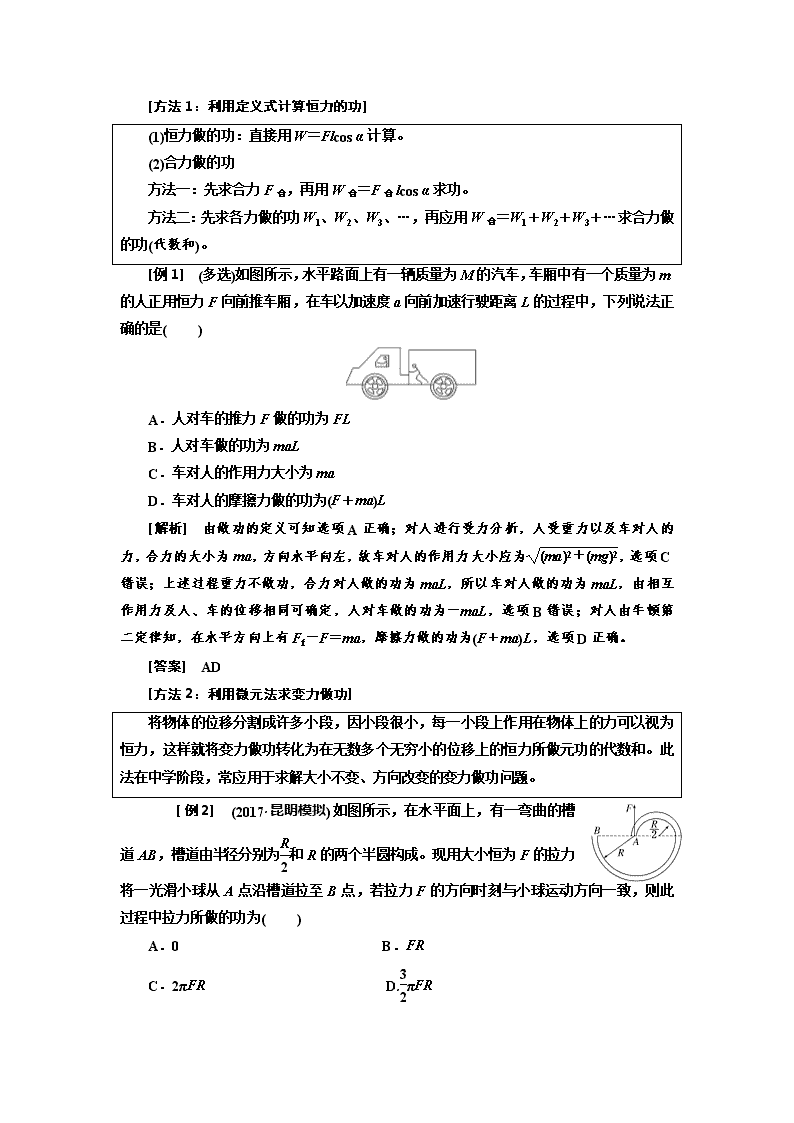
2.如图所示,拖着旧橡胶轮胎跑步是身体耐力训练的一种有效方法。如果某受训者拖着轮胎在水平直道上跑了100 m,那么下列说法正确的是( )
A.轮胎受到地面的摩擦力对轮胎做负功
B.轮胎受到的重力对轮胎做正功
C.轮胎受到的拉力对轮胎不做功
D.轮胎受到的地面的支持力对轮胎做正功
解析:选A 根据力做功的条件,轮胎受到的重力和地面的支持力都与位移垂直,这两个力均不做功,选项B、D错误;轮胎受到地面的摩擦力与位移反向,做负功,A项正确;轮胎受到的拉力与位移夹角小于90°,做正功,C项错误。
3.如图所示,质量为m的物体置于倾角为θ的斜面上,物体与斜面间的动摩擦因数为μ,在外力作用下,斜面以加速度a沿水平方向向左做匀加速运动,运动中物体m与斜面体相对静止。则关于斜面对m的支持力和摩擦力的下列说法中错误的是( )
A.支持力一定做正功 B.摩擦力一定做正功
C.摩擦力可能不做功 D.摩擦力可能做负功
解析:选B 支持力方向垂直斜面向上,故支持力一定做正功。而摩擦力是否存在需要讨论,若摩擦力恰好为零,物体只受重力和支持力,如图所示,此时加速度a=gtan θ,当a>gtan θ时,摩擦力沿斜面向下,摩擦力与位移夹角小于90°,则做正功;当aB
B.重力的平均功率A=B
C.重力的瞬时功率PA=PB
D.重力的瞬时功率PAtB,由P=知AmgR,质点不能到达Q点
C.W=mgR,质点到达Q点后,继续上升一段距离
D.W=2 m/s
故物块能通过圆轨道的最高点,之后做平抛运动,则
水平方向:x=v3t
竖直方向:2R=gt2
解得x=2.4 m。
答案:(1)140 N,方向竖直向下 (2)能 2.4 m
第29课时 机械能守恒定律及其应用(重点突破课)
[必备知识]
1.重力做功的特点
重力做功与路径无关,只与始、末位置的高度差有关。
2.重力势能的特点
重力势能是物体和地球组成的系统所共有的;重力势能的大小与参考平面的选取有关,但重力势能的变化与参考平面的选取无关。
3.重力做功与重力势能变化的关系
(1)定性关系:重力对物体做正功,重力势能减小;重力对物体做负功,重力势能增大。
(2)定量关系:重力对物体做的功等于物体重力势能变化量的负值,即WG=-ΔEp。
4.弹性势能
(1)概念:物体由于发生弹性形变而具有的能量。
(2)大小:弹簧的弹性势能的大小与形变量及劲度系数有关,弹簧的形变量越大,劲度系数越大,弹簧的弹性势能越大。
(3)弹力做功与弹性势能变化的关系:弹力对物体做的功等于弹簧弹性势能变化量的负值,即W=-ΔEp,类似于重力做功与重力势能变化的关系。
5.机械能守恒定律
(1)内容:在只有重力或弹力做功的物体系统内,动能与势能可以相互转化,而总的机械能保持不变。
(2)守恒条件:只有重力或系统内弹力做功。
(3)常用的三种表达式
①守恒式:E1=E2或Ek1+Ep1=Ek2+Ep2;
②转化式:ΔEk=-ΔEp;
③转移式:ΔEA=-ΔEB。
[小题热身]
1.判断正误
(1)重力势能的大小与零势能参考面的选取有关。(√)
(2)重力势能的变化与零势能参考面的选取无关。(√)
(3)被举到高处的物体重力势能一定不为零。(×)
(4)物体的速度增大时,其机械能可能在减小。(√)
(5)物体所受的合外力为零,物体的机械能一定守恒。(×)
(6)物体受到摩擦力作用时,机械能一定要变化。(×)
2.关于重力势能,下列说法中正确的是( )
A.物体的位置一旦确定,它的重力势能的大小也随之确定
B.物体与零势能面的距离越大,它的重力势能也越大
C.一个物体的重力势能从-5 J变化到-3 J,重力势能减少了
D.重力势能的减少量等于重力对物体做的功
解析:选D 物体的重力势能与参考面有关,同一物体在同一位置相对不同的参考面时,重力势能不同,A选项错;物体在零势能面以上,距零势能面的距离越大,重力势能越大,物体在零势能面以下,距零势能面的距离越大,重力势能越小,B选项错;重力势能中的正、 负号表示大小,-5 J的重力势能小于-3 J的重力势能,C选项错;重力做的功度量了重力势能的变化,D选项正确。
3.将质量为100 kg的物体从地面提升到10 m高处,在这个过程中,下列说法中正确的是(取g=10 m/s2)( )
A.重力做正功,重力势能增加1.0×104 J
B.重力做正功,重力势能减少1.0×104 J
C.重力做负功,重力势能增加1.0×104 J
D.重力做负功,重力势能减少1.0×104 J
解析:选C 重力做负功,WG=-mgh=-1.0×104 J,ΔEp=-WG=1.0×104 J,C项正确。
4.(多选)如图所示,A、B两球质量相等,A球用不能伸长的轻绳系于O点,B球用轻弹簧系于O′点,O与O′
点在同一水平面上,分别将A、B球拉到与悬点等高处,使绳和轻弹簧均处于水平,弹簧处于自然状态,将两球分别由静止开始释放,当两球达到各自悬点的正下方时,两球仍处在同一水平面上,则( )
A.两球到达各自悬点的正下方时,两球动能相等
B.两球到达各自悬点的正下方时,A球动能较大
C.两球到达各自悬点的正下方时,B球动能较大
D.两球到达各自悬点的正下方时,A球受到向上的拉力较大
解析:选BD 整个过程中两球减少的重力势能相等,A球减少的重力势能完全转化为A球的动能,B球减少的重力势能转化为B球的动能和弹簧的弹性势能,所以A球的动能大于B球的动能,所以B正确;在悬点正下方位置,根据牛顿第二定律知F=mg+,因为vA>vB,所以A球受到的拉力较大,所以D正确。
提能点(一) 机械能守恒的理解与判断
1.对机械能守恒条件的理解
(1)只受重力作用,例如做平抛运动的物体机械能守恒。
(2)除重力外,物体还受其他力,但其他力不做功或做功代数和为零。
(3)除重力外,只有系统内的弹力做功,并且弹力做的功等于弹性势能减少量,那么系统的机械能守恒。注意:并非物体的机械能守恒,如与弹簧相连的小球下摆的过程机械能减少。
2.机械能是否守恒的三种判断方法
(1)利用做功即守恒条件判断。
(2)利用机械能的定义判断:若物体或系统的动能、势能之和保持不变,则机械能守恒。
(3)利用能量转化判断:若物体或系统与外界没有能量交换,内部也没有机械能与其他形式能的转化,则机械能守恒。
[典例] (多选)如图所示,下列关于机械能是否守恒的判断正确的是( )
A.甲图中,物体A将弹簧压缩的过程中,物体A机械能守恒
B.乙图中,物体A固定,物体B沿斜面匀速下滑,物体B的机械能守恒
C.丙图中,不计任何阻力和定滑轮质量时,A加速下落,B加速上升过程中,A、B组成的系统机械能守恒
D.丁图中,小球沿水平面做匀速圆锥摆运动时,小球的机械能守恒
[解析] 甲图中重力和弹力做功,物体A和弹簧组成的系统机械能守恒,但物体A机械能不守恒,A错;乙图中物体B除受重力外,还受到弹力和摩擦力作用,弹力不做功,但摩擦力做负功,物体B的机械能不守恒,B错;丙图中绳子张力对A做负功,对B做正功,代数和为零,A、B组成的系统机械能守恒,C对;丁图中小球的动能不变,势能不变,机械能守恒,D对。
[答案] CD
(1)机械能守恒的条件绝不是合外力的功等于零,更不是合外力为零;“只有重力或弹力做功”不等于“只受重力或弹力作用”。
(2)对于一些绳子突然绷紧、物体间碰撞等情况,除非题目特别说明,否则机械能必定不守恒。
(3)对于系统机械能是否守恒,可以根据能量的转化进行判断。
[集训冲关]
1.在如图所示的物理过程示意图中,甲图一端固定有小球的轻杆,从右偏上30°角释放后绕光滑支点摆动;乙图为末端固定有小球的轻质直角架,释放后绕通过直角顶点的固定轴O无摩擦转动;丙图为轻绳一端连着一小球,从右偏上30°角处自由释放;丁图为置于光滑水平面上的带有竖直支架的小车,把用细绳悬挂的小球从图示位置释放,小球开始摆动,则关于这几个物理过程(空气阻力忽略不计),下列判断中正确的是( )
A.甲图中小球机械能守恒 B.乙图中小球A机械能守恒
C.丙图中小球机械能守恒 D.丁图中小球机械能守恒
解析:选A 甲图过程中轻杆对小球不做功,小球的机械能守恒,A正确;乙图过程中轻杆对A的弹力不沿杆的方向,会对小球做功,所以小球A的机械能不守恒,但两个小球组成的系统机械能守恒,B错误;丙图中小球在绳子绷紧的瞬间有动能损失,机械能不守恒,C错误;丁图中小球和小车组成的系统机械能守恒,但小球的机械能不守恒,这是因为摆动过程中小球的轨迹不是圆弧,细绳会对小球做功,D错误。
2.把小球放在竖立的弹簧上,并把球往下按至A
位置,如图甲所示。迅速松手后,球升高至最高位置C(图丙),途中经过位置B时弹簧正处于原长(图乙)。忽略弹簧的质量和空气阻力。则小球从A运动到C的过程中,下列说法正确的是( )
A.经过位置B时小球的加速度为0
B.经过位置B时小球的速度最大
C.小球、地球、弹簧所组成系统的机械能守恒
D.小球、地球、弹簧所组成系统的机械能先增大后减小
解析:选C 分析小球从A到B的过程中受力情况,开始时弹力大于重力,中间某一位置弹力和重力相等,接着弹力小于重力,在B点时,弹力为零,小球从B到C的过程中,只受重力。根据牛顿第二定律可以知道小球从A到B过程中,先向上加速再向上减速,所以速度最大位置应该是加速度为零的位置,在A、B之间某一位置,A、B错;从A到C过程中对于小球、地球、弹簧组成的系统只有重力和弹力做功,所以系统的机械能守恒,C对,D错。
3.如图所示,固定的倾斜光滑杆上套有一个质量为m的圆环,圆环与一橡皮绳相连,橡皮绳的另一端固定在地面上的A点,橡皮绳竖直时处于原长h。让圆环沿杆滑下,滑到杆的底端时速度为零。则在圆环下滑过程中( )
A.圆环机械能守恒
B.橡皮绳的弹性势能一直增大
C.橡皮绳的弹性势能增加了mgh
D.橡皮绳再次达到原长时圆环动能最大
解析:选C 圆环沿杆滑下,滑到杆的底端的过程中有两个力对圆环做功,即环的重力和橡皮绳的拉力,所以圆环的机械能不守恒,如果把圆环和橡皮绳组成的系统作为研究对象,则系统的机械能守恒,故A错误;橡皮绳的弹性势能随橡皮绳的形变量的变化而变化,由题图知橡皮绳先缩短后再伸长,故橡皮绳的弹性势能先不变再增大,故B错误;根据系统的机械能守恒,圆环的机械能减少了mgh,那么圆环的机械能的减少量等于橡皮绳的弹性势能增大量,为mgh,故C正确;在圆环下滑过程中,橡皮绳再次达到原长时,该过程中圆环的动能一直增大,但不是最大,沿杆方向合力为零的时刻,圆环的动能最大,故D错误。
提能点(二) 单个物体的机械能守恒
应用机械能守恒定律的一般步骤
[典例] 如图所示,竖直平面内的一半径R=0.50 m的光滑圆弧槽BCD,B点与圆心O等高,一水平面与圆弧槽相接于D点,质量m=0.10 kg的小球从B点正上方H=0.95 m高处的A点自由下落,由B点进入圆弧轨道,从D点飞出后落在水平面上的Q点,DQ间的距离x=2.4 m,球从D点飞出后的运动过程中相对水平面上升的最大高度h=0.80 m,g取10 m/s2,不计空气阻力,求:
(1)小球经过C点时轨道对它的支持力大小FN;
(2)小球经过最高点P的速度大小vP;
(3)D点与圆心O的高度差hOD。
[解析] (1)设小球经过C点时速度为v1,取C点为零势能面,由机械能守恒有
mg(H+R)=mv12
由牛顿第二定律有FN-mg=
代入数据解得FN=6.8 N。
(2)小球从P到Q做平抛运动,有
h=gt2
=vPt
代入数据解得vP=3.0 m/s。
(3)取DQ为零势能面,由机械能守恒定律,有
mvP2+mgh=mg(H+hOD),
代入数据,解得hOD=0.30 m。
[答案] (1)6.8 N (2)3.0 m/s (3)0.30 m
机械能守恒定律的应用技巧
(1)机械能守恒定律是一种“能—能转化”关系,其守恒是有条件的,因此,应用时首先要对研究对象在所研究的过程中机械能是否守恒做出判断。
(2)如果系统(除地球外)只有一个物体,用守恒式列方程较方便;对于由两个或两个以上物体组成的系统,用转化式或转移式列方程较简便。
[集训冲关]
1.(多选)如图所示,在地面上以速度v0抛出质量为m的物体,抛出后物体落在比地面低h的海平面上,若以地面为零势能面,且不计空气阻力,则( )
A.物体在海平面的重力势能为mgh
B.重力对物体做的功为mgh
C.物体在海平面上的机械能为mv02+mgh
D.物体在海平面上的动能为mv02+mgh
解析:选BD 以地面为零势能面,海平面在地面以下h处,所以物体在海平面的重力势能是-mgh,A错;重力做功和路径无关,和初、末位置高度差有关,从地面到海平面,位移竖直向下为h,重力也向下,重力对物体做功mgh,B对;从地面到海平面过程只有重力做功,机械能守恒,在海平面处的机械能等于在地面的机械能,在地面重力势能为零,动能为mv02,机械能为E=0+mv02=mv02,C错;在海平面处的机械能同样为mv02,而在海平面重力势能为-mgh,所以mv02=Ek+(-mgh),得动能Ek=mv02+mgh,D对。
2.如图所示,质量为m的小球从四分之一光滑圆弧轨道顶端由静止释放,从轨道末端O点水平抛出,击中平台右下侧挡板上的P点。以O为原点在竖直面内建立如图所示的平面直角坐标系,挡板形状满足方程y=6-x2(单位:m),小球质量m=0.4 kg,圆弧轨道半径R=1.25 m,g取10 m/s2,求:
(1)小球对圆弧轨道末端的压力大小;
(2)小球从O点到P点所需的时间(结果可保留根号)。
解析:(1)对小球,从释放到O点过程中由机械能守恒得
mgR=mv2
代入数据解得v=5 m/s
小球在圆轨道最低点有FN-mg=m
解得FN=12 N
根据牛顿第三定律,小球对轨道末端的压力大小
FN′=FN=12 N。
(2)小球从O点水平抛出后满足y=gt2
x=vt
又有y=6-x2
联立解得t= s。
答案:(1)12 N (2) s
提能点(三) 多个物体的机械能守恒
考法1 杆连物体系统机械能守恒
问
题
简
述
如图所示的两物体组成的系统,当释放后A、B在竖直平面内绕过O点的轴转动,且A、B的角速度相等。
方
法
突
破
求解这类问题时,由于二者角速度相等,所以关键是根据二者转动半径的关系寻找两物体的线速度的关系,根据两物体间的位移关系,寻找到系统重力势能的变化,最后根据ΔEk=-ΔEp列出机械能守恒的方程求解。另外注意的是轻杆对物体提供的弹力不一定沿着杆,轻杆的弹力也就不一定与速度方向垂直,轻杆的弹力对一个物体做了正功,就对另一物体做了负功,并且绝对值相等。
[例1] (多选)(2015·全国卷Ⅱ)如图,滑块a、b的质量均为m,a套在固定竖直杆上,与光滑水平地面相距h,b放在地面上。a、b通过铰链用刚性轻杆连接,由静止开始运动。不计摩擦,a、b可视为质点,重力加速度大小为g。则( )
A.a落地前,轻杆对b一直做正功
B.a落地时速度大小为
C.a下落过程中,其加速度大小始终不大于g
D.a落地前,当a的机械能最小时,b对地面的压力大小为mg
[解析] 由题意知,系统机械能守恒。设某时刻a、b的速度分别为va、vb。此时刚性轻杆与竖直杆的夹角为θ,分别将va、vb分解,如图。因为刚性杆不可伸长,所以沿杆的分速度v∥与v∥′是相等的,即vacos θ=vb sin θ。当a滑至地面时θ=90°,此时vb
=0,由系统机械能守恒得mgh=mva2,解得va=,选项B正确。同时由于b初、末速度均为零,运动过程中其动能先增大后减小,即杆对b先做正功后做负功,选项A错误。杆对b的作用先是推力后是拉力,对a则先是阻力后是动力,即a的加速度在受到杆的向下的拉力作用时大于g,选项C错误。b的动能最大时,杆对a、b的作用力为零,此时a的机械能最小,b只受重力和支持力,所以b对地面的压力大小为mg,选项D正确。
[答案] BD
考法2 绳连物体系统机械能守恒
问题简述
如图所示的两物体组成的系统,当释放B而使A、B运动的过程中,A、B的速度均沿绳子方向,在相等时间内A、B运动的路程相等,A、B的速率也相等。但有些问题中两物体的速率并不相等,这时就需要先进行运动的合成与分解找出两物体运动速度之间的关系。
方法突破
求解这类问题时,由于二者速率相等或相关,所以关键是寻找两物体间的位移关系,进而找到系统重力势能的变化。列机械能守恒方程时,一般选用ΔEk=-ΔEp的形式。另外注意系统机械能守恒并非每个物体机械能守恒,因为细绳对系统中的每一个物体都要做功。
[例2] (2017·济南质检)如图所示,跨过同一高度处的定滑轮的细线连接着质量相同的物体A和B,A套在光滑水平杆上,定滑轮离水平杆的高度h=0.2 m,开始时让连着A的细线与水平杆的夹角θ1=37°,由静止释放B,当细线与水平杆的夹角θ2=53°时,A的速度为多大?在以后的运动过程中,A所获得的最大速度为多大?(设B不会碰到水平杆,sin 37°=0.6,sin 53°=0.8,取g=10 m/s2)
[解析] A、B两物体组成的系统,只有动能和重力势能的转化,机械能守恒。设θ2=53°时,A、B两物体的速度分别为vA、vB,B下降的高度为h1,则有mgh1=mvA2+mvB2
其中h1=-
vAcos θ2=vB
代入数据解得vA≈1.1 m/s。
由于绳子的拉力对A做正功,使A加速,至左滑轮正下方时速度最大,此时B的速度为零,此过程B下降高度设为h2,则由机械能守恒定律得mgh2=mvAm2
其中h2=-h
代入数据解得vAm≈1.6 m/s。
[答案] 1.1 m/s 1.6 m/s
考法3 弹簧连接的系统机械能守恒
问题简述
由弹簧相连的物体系统,在运动过程中既有重力做功又有弹簧弹力做功,这时系统内物体的动能、重力势能和弹簧弹性势能相互转化或转移,而总的机械能守恒。
方法突破
求解这类问题时,首先以弹簧遵循的胡克定律为分析问题的突破口:弹簧伸长或缩短时产生的弹力的大小遵循F=kx和ΔF=kΔx。其次,以弹簧的弹力做功为分析问题的突破口:弹簧发生形变时,具有一定的弹性势能。弹簧的弹性势能与弹簧的劲度系数、形变量有关,但是在具体的问题中不用计算弹性势能的大小,弹簧的形变量相同的时候弹性势能相同,通过运算可以约去。当题目中始、末都不是弹簧原长时,要注意始、末弹力的大小与方向时刻要与当时的形变相对应,即伸长量或压缩量,而力的位移就可能是两次形变量之和或之差。
[例3] 如图所示,A、B两小球由绕过轻质定滑轮的细线相连,A放在固定的光滑斜面上,B、C两小球在竖直方向上通过劲度系数为k的轻质弹簧相连,C球放在水平地面上。现用手控制住A,并使细线刚刚拉直但无拉力作用,并保证滑轮左侧细线竖直、右侧细线与斜面平行。已知A的质量为4m,B、C的质量均为m,重力加速度为g,细线与滑轮之间的摩擦不计。开始时整个系统处于静止状态;释放A后,A沿斜面下滑至速度最大时,C恰好离开地面。求:
(1)斜面的倾角α。
(2)球A获得的最大速度vm。
[解析] (1)由题意可知,当A沿斜面下滑至速度最大时,C恰好离开地面。物体A的加速度此时为零
由牛顿第二定律:4mgsin α-2mg=0
则:sin α=,即α=30°。
(2)由题意可知,A、B两小球及轻质弹簧组成的系统在初始时和A沿斜面下滑至速度最大时的机械能守恒,同时弹簧的弹性势能相等,故有:2mg=kΔx
4mgΔxsin α-mgΔx=(5m)vm2
得:vm=2g 。
[答案] (1)30° (2)2g
[通法归纳]
(1)对多个物体组成的系统要注意判断物体运动过程中,系统的机械能是否守恒。
(2)注意寻找用绳或杆或弹簧相连接的物体间的速度关系和位移关系。
(3)列机械能守恒方程时,一般选用ΔEk=-ΔEp或ΔEA=-ΔEB的形式。
[集训冲关]
1. (2015·天津高考)如图所示,固定的竖直光滑长杆上套有质量为m的小圆环,圆环与水平状态的轻质弹簧一端连接,弹簧的另一端连接在墙上,且处于原长状态。现让圆环由静止开始下滑,已知弹簧原长为L,圆环下滑到最大距离时弹簧的长度变为2L(未超过弹性限度),则在圆环下滑到最大距离的过程中( )
A.圆环的机械能守恒
B.弹簧弹性势能变化了mgL
C.圆环下滑到最大距离时,所受合力为零
D.圆环重力势能与弹簧弹性势能之和保持不变
解析:选B 圆环沿杆下滑的过程中,圆环与弹簧组成的系统动能、弹性势能、重力势能之和守恒,选项A、D错误;弹簧长度为2L时,圆环下落的高度h=L,根据机械能守恒定律,弹簧的弹性势能增加了ΔEp=mgh=mgL,选项B正确;圆环释放后,圆环向下先做加速运动,后做减速运动,当速度最大时,合力为零,下滑到最大距离时,具有向上的加速度,合力不为零,选项C错误。
2.(2017·青岛检测)一半径为R的半圆形竖直圆柱面,用轻质不可伸长的细绳连接的A、B两球悬挂在圆柱面边缘两侧,A球质量为B球质量的2倍,现将A球从圆柱边缘处由静止释放,如图所示。已知A球始终不离开圆柱内表面,且细绳足够长,若不计一切摩擦,求:
(1)A球沿圆柱内表面滑至最低点时速度的大小;
(2)A球沿圆柱内表面运动的最大位移。
解析:(1)设A球沿圆柱内表面滑至最低点时速度的大小为v,B球的质量为m,
则根据机械能守恒定律有
2mgR-mgR=×2mv2+mvB2
由图甲可知,A球的速度v与B球速度vB的关系为
vB=v1=vcos 45°
联立解得v=2 。
(2)当A球的速度为零时,A球沿圆柱内表面运动的位移最大,设为x,如图乙所示,
由几何关系可知A球下降的高度
h=
根据机械能守恒定律,
有2mgh-mgx=0
解得x=R。
答案:(1)2 (2)R
3.(2017·济南模拟)半径为R的光滑圆环竖直放置,环上套有两个质量分别为m和m的小球A和B。A、B之间用一长为R的轻杆相连,如图所示。开始时,A、B都静止,且A在圆环的最高点,现将A、B释放,试求:
(1)B球到达最低点时的速度大小;
(2)B球到达最低点的过程中,杆对A球做的功;
(3)B球在圆环右侧区域内能达到的最高点位置。
解析:(1)释放后B到达最低点的过程中A、B和杆组成的系统机械能守恒,
mAgR+mBgR=mAvA2+mBvB2,
又OA⊥OB,AB杆长=R,故OA、OB与杆间夹角均为45°,可得vA=vB,
解得:vB= 。
(2)对小球A应用动能定理可得:
W杆A+mAgR=mAvA2,
又vA=vB
解得杆对A球做功W杆A=0。
(3)设B球到达右侧最高点时,OB与竖直方向之间的夹角为θ,取圆环的圆心O为零势面,
由系统机械能守恒可得:
mAgR=mBgRcos θ-mAgRsin θ,
代入数据可得θ=30°,
所以B球在圆环右侧区域内达到最高点时,高于圆心O的高度
hB=Rcos θ=R。
答案:(1) (2)0 (3)高于O点R处
提能点(四) 用机械能守恒定律解决非质点问题
在应用机械能守恒定律处理实际问题时,经常遇到像“链条”“液柱”类的物体,其在运动过程中将发生形变,其重心位置相对物体也发生变化,因此这类物体不能再看成质点来处理。
物体虽然不能看成质点来处理,但因只有重力做功,物体整体机械能守恒。一般情况下,可将物体分段处理,确定质量分布均匀的规则物体各部分的重心位置,根据初、末状态物体重力势能的变化列式求解。
[典例] 如图所示,AB为光滑的水平面,BC是倾角为α的足够长的光滑斜面,斜面体固定不动。AB、BC间用一小段光滑圆弧轨道相连。一条长为L的均匀柔软链条开始时静止的放在ABC面上,其一端D至B的距离为L-a。现自由释放链条,则:
(1)链条下滑过程中,系统的机械能是否守恒?简述理由;
(2)链条的D端滑到B点时,链条的速率为多大?
[解析] (1)链条在下滑过程中机械能守恒,因为斜面BC和AB面均光滑,链条下滑时只有重力做功,符合机械能守恒的条件。
(2)设链条质量为m,可以认为始、末状态的重力势能变化是由L-a段下降引起的,
高度减少量h=sin α=sin α
该部分的质量为m′=(L-a)
由机械能守恒定律可得:(L-a)gh=mv2,
可解得:v= 。
[答案] (1)见解析 (2)
(1)寻找等效长度,如本例中的“L-a”,可以快速准确的解决非质点问题。
(2)重力势能的变化或重力做功利用等效长度来表示,但动能的表达式一般要针对整体。
(3)机械能守恒定律解决非质点问题,犹如整体隔离法解决动力学问题。
[集训冲关]
1.如图所示,粗细均匀,两端开口的U形管内装有同种液体,开始时两边液面高度差为h,管中液柱总长度为4h,后来让液体自由流动,当两液面高度相等时,右侧液面下降的速度为( )
A. B.
C. D.
解析:选A 当两液面高度相等时,减少的重力势能转化为整个液体的动能,根据功能关系有mg·h=mv2,解得:v= 。
2.如图所示,露天娱乐场空中列车是由许多节完全相同的车厢组成,列车先沿光滑水平轨道行驶,然后滑上一固定的半径为R的空中圆形光滑轨道,若列车全长为L(L>2πR),R远大于一节车厢的长度和高度,那么列车在运行到圆环轨道前的速度至少要多大,才能使整个列车安全通过固定的圆环轨道(车厢间的距离不计)。
解析:当列车进入轨道后,动能逐渐向势能转化,车速逐渐减小,当车厢占满圆环时的速度最小,设此时的速度为v,列车的质量为M,
轨道上那部分列车的质量M′=·2πR
由机械能守恒定律可得:Mv02=Mv2+M′gR
又因圆环顶部车厢应满足:mg=m,
可求得:v0= 。
答案:
一、单项选择题
1.如图所示,斜面体置于光滑水平地面上,其光滑斜面上有一物体由静止沿斜面下滑,在物体下滑过程中,下列说法正确的是( )
A.物体的重力势能减少,动能不变
B.斜面体的机械能不变
C.斜面对物体的作用力垂直于接触面,不对物体做功
D.物体和斜面体组成的系统机械能守恒
解析:选D 物体由静止开始下滑的过程其重力势能减少,动能增加,A错误;物体在下滑过程中,斜面体做加速运动,其机械能增加,B错误;物体沿斜面下滑时,既沿斜面向下运动,又随斜面向右运动,其合速度方向与弹力方向不垂直,弹力方向垂直于接触面,但与速度方向之间的夹角大于90°,所以斜面对物体的作用力对物体做负功,C错误;对物体与斜面体组成的系统,只有物体的重力和物体与斜面间的弹力做功,机械能守恒,D正确。
2.(2017·长沙质检)如图所示为某跳水运动员自离开跳板开始计时的速度与时间关系图像,假设空气阻力忽略不计,根据图像可知( )
A.t2时刻运动员到达起跳的最高点
B.t2~t3时间内,运动员处于失重状态
C.0~t3时间内,运动员机械能守恒
D.0~t3时间内,合力对运动员做负功
解析:选D 由题图知,在t1时刻速度为零,运动员到达最高点,A错误;t2~t3时间内,运动员向下做减速运动,处于超重状态,B错误;在t2~t3时间内,水的阻力对运动员做负功,运动员机械能不守恒,C错误;在0~t3内由动能定理知,W合<0,D正确。
3.如图所示,用长为L的轻绳把一个小铁球悬挂在高为2L的O点处,小铁球以O点为圆心在竖直平面内做圆周运动且恰能到达最高点B
处,不计空气阻力。若运动中轻绳断开,则小铁球落到地面时的速度大小为( )
A. B.
C. D.
解析:选D 小铁球恰能到达最高点B,则小铁球在最高点处的速度v=。以地面为零势能面,小铁球在B点处的总机械能为mg×3L+mv2=mgL,无论轻绳是在何处断的,小铁球的机械能总是守恒的,因此到达地面时的动能mv2=mgL,故小铁球落到地面的速度v′=,D正确。
4.如图所示,长为L的均匀链条放在光滑水平桌面上,且使长度的垂在桌边,松手后链条从静止开始沿桌边下滑,则链条滑至刚刚离开桌边时的速度大小为( )
A. B.
C. D.4
解析:选C 由机械能守恒定律ΔEp减=ΔEk增,即mg·-mg·=mv2,所以v=。
5.有一竖直放置的“T”形架,表面光滑,滑块A、B分别套在水平杆与竖直杆上,A、B用一根不可伸长的轻细绳相连,A、B质量相等,且可看做质点,如图所示,开始时细绳水平伸直,A、B静止。由静止释放B后,已知当细绳与竖直方向的夹角为60°时,滑块B沿着竖直杆下滑的速度为v,则连接A、B的绳长为( )
A. B.
C. D.
解析:选D 由运动的合成与分解可知滑块A和B沿绳伸长方向的速度大小相等,有vAsin 60°=vcos 60°,解得vA=v,滑块A、B组成的系统机械能守恒,设滑块B下滑的高度为h,有mgh=mvA2+mv2,解得h=,由几何关系可知绳长L=2h=,故选项D正确。
二、多项选择题
6.(2017·常德质检)重10 N的滑块在倾角为30°的光滑斜面上,从
a点由静止下滑,到b点接触到一个轻弹簧,滑块压缩弹簧到c点开始弹回,返回b点离开弹簧,最后又回到a点,已知ab=1 m,bc=0.2 m,那么在整个过程中( )
A.滑块动能的最大值是6 J
B.弹簧弹性势能的最大值是6 J
C.从c到b弹簧的弹力对滑块做的功是6 J
D.整个过程系统机械能守恒
解析:选BCD 以滑块和弹簧为系统,在滑块的整个运动过程中,只发生动能、重力势能和弹性势能之间的相互转化,系统机械能守恒,D正确;滑块从a到c重力势能减小了mgacsin 30°=6 J,全部转化为弹簧的弹性势能,A错误,B正确;从c到b弹簧恢复原长,通过弹簧的弹力对滑块做功,将6 J的弹性势能全部转化为滑块的机械能,C正确。
7.(2017·佛山模拟)如图所示,一根长为L不可伸长的轻绳跨过光滑的水平轴O,两端分别连接质量为2m的小球A和质量为m的物块B,由图示位置释放后,当小球转动到水平轴正下方时轻绳的中点正好在水平轴O点,且此时物块B的速度刚好为零,则下列说法中正确的是( )
A.物块B一直处于静止状态
B.小球A从图示位置运动到水平轴正下方的过程中机械能守恒
C.小球A运动到水平轴正下方时的速度小于
D.小球A从图示位置运动到水平轴正下方的过程中,小球A与物块B组成的系统机械能守恒
解析:选CD 当小球转动到水平轴正下方时轻绳的中点正好在水平轴O点,所以小球A下降的高度为,物块B会上升一定的高度h,由机械能守恒得·2mv2=2mg·-mgh,所以小球A运动到水平轴正下方时的速度v<,A错误,C正确;在整个过程中小球A与物块B组成的系统机械能守恒,B错误,D正确。
8.如图所示,固定在水平面上的光滑斜面倾角为30°,质量分别为M、m的两个物体通过细绳及轻弹簧连接于光滑轻滑轮两侧,斜面底端有一与斜面垂直的挡板。开始时用手按住物体M,此时M距离挡板的距离为s,滑轮两边的细绳恰好伸直,而没有力的作用。已知M=2m,空气阻力不计。松开手后,关于二者的运动,下列说法中正确的是( )
A.M和m组成的系统机械能守恒
B.当M的速度最大时,m与地面间的作用力为零
C.若M恰好能到达挡板处,则此时m的速度为零
D.若M恰好能到达挡板处,则此过程中重力对M做的功等于弹簧弹性势能的增加量与物体m的机械能增加量之和
解析:选BD M在运动过程中,M、m与弹簧组成的系统机械能守恒,A错误;当M速度最大时,弹簧的弹力等于Mgsin 30°=mg,此时m对地面的压力恰好为零,B正确;然后M做减速运动,恰好能到达挡板时,也就是速度刚好减小到零,之后M会上升,所以此时弹簧弹力大于mg,即此时m受到的绳拉力大于自身重力,m还在加速上升,C错误;根据功能关系,M减小的机械能,等于m增加的机械能与弹簧增加弹性势能之和,而M恰好到达挡板时,动能恰好为零,因此减小的机械能等于减小的重力势能,即等于重力对M做的功,D正确。
三、计算题
9.(2017·阜阳质检)半径R=0.50 m的光滑圆环固定在竖直平面内,轻质弹簧的一端固定在环的最高点A处,另一端系一个质量m=0.20 kg的小球,小球套在圆环上,已知弹簧的原长为L0=0.50 m,劲度系数k=4.8 N/m。将小球从如图所示的位置由静止开始释放,小球将沿圆环滑动并通过最低点C,在C点时弹簧的弹性势能EpC=0.6 J。(g取10 m/s2),求:
(1)小球经过C点时的速度vC的大小;
(2)小球经过C点时对环的作用力的大小和方向。
解析:(1)小球从B到C,根据机械能守恒定律有
mg(R+Rcos 60°)=EpC+mvC2
解得vC=3 m/s。
(2)小球经过C点时受到三个力作用,即重力G、弹簧弹力F、环的作用力FN,假设环对小球的作用力方向向上,对小球根据牛顿第二定律有
F+FN-mg=m
F=kx
解得FN=3.2 N。
假设成立,环对小球的作用力方向竖直向上。根据牛顿第三定律得出,小球对环的作用力大小为3.2 N,方向竖直向下。
答案:(1)3 m/s (2)3.2 N,方向竖直向下
10.如图所示,一内壁光滑的细管弯成半径为R=0.4 m的半圆形轨道CD,竖直放置,其内径略大于小球的直径,水平轨道与竖直半圆轨道在C点连接完好。置于水平轨道上的弹簧左端与竖直墙壁相连,B处为弹簧的自然状态。将一个质量为m=0.8 kg的小球放在弹簧的右侧后,用力向左侧推小球而压缩弹簧至A处,然后将小球由静止释放,小球运动到C处后对轨道的压力为 F1=58 N。水平轨道以B处为界,左侧AB段长为x=0.3 m,与小球间的动摩擦因数为μ=0.5,右侧BC段光滑。g=10 m/s2,求:
(1)弹簧在压缩时所储存的弹性势能;
(2)小球运动到轨道最高处D点时对轨道的压力大小。
解析:(1)小球运动到C处时,由牛顿第三定律得轨道对小球的支持力F1′=F1=58 N,
由牛顿第二定律得F1′-mg=m
解得v1= 。
代入数据解得v1=5 m/s
根据动能定理得Ep-μmgx=mv12
代入数据解得Ep=11.2 J。
(2)小球从C到D过程,由机械能守恒定律得
mv12=2mgR+mv22
代入数据解得v2=3 m/s。
由于v2>=2 m/s,所以小球在D处对轨道外壁有压力,由牛顿第二定律得F2+mg=m
代入数据解得F2=10 N。
根据牛顿第三定律,小球对轨道的压力大小为10 N。
答案:(1)11.2 J (2)10 N
11.如图所示,在同一竖直平面内,一轻质弹簧一端固定,另一自由端恰好与水平线AB平齐,静止放在倾角为53°的光滑斜面上。一长为L=9 cm的轻质细绳一端固定在O点,另一端系一质量为m=1 kg的小球,将细绳拉直呈水平,使小球在位置C由静止释放,小球到达最低点D时,细绳刚好被拉断。之后小球在运动过程中恰好沿斜面方向将弹簧压缩,最大压缩量为x=5 cm。(g=10 m/s2,sin 53°=0.8,cos 53°=0.6)求:
(1)细绳受到的拉力的最大值;
(2)D点到水平线AB的高度h;
(3)弹簧所获得的最大弹性势能Ep。
解析:(1)小球由C运动到D,由机械能守恒定律得:
mgL=mv12
解得v1=①
在D点,由牛顿第二定律得
FT-mg=m②
由①②解得FT=30 N。
由牛顿第三定律知细绳所能承受的最大拉力为30 N。
(2)由D到A,小球做平抛运动
vy2=2gh③
tan 53°=④
联立①③④解得h=16 cm。
(3)小球从C点到将弹簧压缩至最短的过程中,小球与弹簧组成的系统机械能守恒,
即Ep=mg(L+h+xsin 53°),
代入数据得:Ep=2.9 J。
答案:(1)30 N (2)16 cm (3)2.9 J
第30课时 功能关系 能量守恒定律(重点突破课)
[必备知识]
1.功能关系
(1)功是能量转化的量度,即做了多少功就有多少能量发生了转化。
(2)做功的过程一定伴随着能量的转化,能量的转化可以通过做功来实现。
2.能量守恒定律
(1)内容:能量既不会凭空产生,也不会凭空消失,它只能从一种形式转化为另一种形式,或者从一个物体转移到别的物体,在转化或转移的过程中,能量的总量保持不变。
(2)表达式:ΔE减=ΔE增。
[小题热身]
1.判断正误
(1)力对物体做了多少功,物体就具有多少能。(×)
(2)能量在转移或转化过程中,其总量会不断减少。(×)
(3)在物体机械能减少的过程中,动能有可能是增大的。(√)
(4)滑动摩擦力做功时,一定会引起机械能的转化。(√)
(5)一个物体的能量增加,必定有别的物体能量减少。(√)
2.(多选)一个物体在光滑的水平面上匀速滑行,则( )
A.这个物体没有能
B.这个物体的能量不发生变化
C.这个物体没有对外做功
D.以上说法均不对
解析:选BC 物体在光滑水平面上匀速滑动过程中没有外力对物体做功,物体的能量不发生变化,但并不是物体不具有能量,故选项B、C正确,A、D错误。
3.上端固定的一根细线下面悬挂一摆球,摆球在空气中摆动,摆动的幅度越来越小,对此现象下列说法正确的是( )
A.摆球机械能守恒
B.总能量守恒,摆球的机械能正在减少,减少的机械能转化为内能
C.能量正在消失
D.只有动能和重力势能的相互转化
解析:选B 由于空气阻力的作用,机械能减少,机械能不守恒,内能增加,机械能转化为内能,能量总和不变,B正确。
4.(2016·四川高考)韩晓鹏是我国首位在冬奥会雪上项目夺冠的运动员。他在一次自由式滑雪空中技巧比赛中沿“助滑区”保持同一姿态下滑了一段距离,重力对他做功1 900 J,他克服阻力做功100 J。韩晓鹏在此过程中( )
A.动能增加了1 900 J B.动能增加了2 000 J
C.重力势能减小了1 900 J D.重力势能减小了2 000 J
解析:选C 根据动能定理得韩晓鹏动能的变化ΔE=WG+Wf=1 900 J-100 J=1 800 J>0,故其动能增加了1 800 J,选项A、B错误;根据重力做功与重力势能变化的关系WG=-ΔEp,所以ΔEp=-WG=-1 900 J<0,故韩晓鹏的重力势能减小了1 900 J,选项C正确,选项D错误。
提能点(一) 功能关系的理解及应用
1.几种常见的功能关系
几种常见力做功
对应的能量变化
数量关系式
重力
正功
重力势能减少
WG=-ΔEp
负功
重力势能增加
弹簧等
的弹力
正功
弹性势能减少
W弹=-ΔEp
负功
弹性势能增加
电场力
正功
电势能减少
W电=-ΔEp
负功
电势能增加
合力
正功
动能增加
W合=ΔEk
负功
动能减少
重力以外
的其他力
正功
机械能增加
W其=ΔE
负功
机械能减少
2.两个特殊的功能关系
(1)滑动摩擦力与两物体间相对位移的乘积等于产生的内能,即Ffx相对=ΔQ。
(2)感应电流克服安培力做的功等于产生的电能,即W克安=ΔE电。
[典例] 如图所示,在竖直平面内有一半径为R的圆弧轨道,半径OA水平、OB竖直,一个质量为m的小球自A的正上方P点由静止开始自由下落,小球沿轨道到达最高点B时对轨道压力为 。已知AP=2R,重力加速度为g,则小球从P到B的运动过程中( )
A.重力做功2mgR B.合力做功mgR
C.克服摩擦力做功mgR D.机械能减少2mgR
[解析] 小球能通过B点,在B点速度v满足mg+mg=m,解得v= ,从P到B过程,重力做功等于重力势能减小量为mgR,动能增加量为mv2=mgR,合力做功等于动能增加量mgR,机械能减少量为mgR-mgR=mgR,克服摩擦力做功等于机械能的减少量mgR,故只有B选项正确。
[答案] B
(1)在应用功能关系解决具体问题的过程中,动能的变化用动能定理分析。
(2)重力势能的变化用重力做功分析。
(3)机械能的变化用除重力和弹力之外的力做功分析。
(4)电势能的变化用电场力做功分析。
[集训冲关]
1.(多选)如图所示,在升降机内固定一光滑的斜面体,一轻弹簧的一端连在位于斜面体上方的固定木板B上,另一端与质量为m的物块A相连,弹簧与斜面平行。整个系统由静止开始加速上升高度h的过程中( )
A.物块A的重力势能增加量一定等于mgh
B.物块A的动能增加量等于斜面的支持力和弹簧的拉力对其做功的代数和
C.物块A的机械能增加量等于斜面的支持力和弹簧的拉力对其做功的代数和
D.物块A和弹簧组成的系统的机械能增加量等于斜面对物块的支持力和木板B对弹簧的拉力做功的代数和
解析:选CD 物块A相对斜面下滑一段距离,故选项A错误;根据动能定理可知,物块A动能的增加量应等于重力、支持力及弹簧弹力对其做功的代数和,故选项B错误;物块A机械能的增加量应等于除重力以外的其他力对其做功的代数和,选项C正确;物块A
和弹簧组成的系统的机械能增加量应等于除重力和弹簧弹力以外的其他力做功的代数和,故选项D正确。
2.(多选)如图所示,一固定斜面倾角为30°,一质量为m的小物块自斜面底端以一定的初速度沿斜面向上做匀减速运动,加速度大小等于重力加速度的大小g。物块上升的最大高度为H,则此过程中,物块的( )
A.动能损失了2mgH B.动能损失了mgH
C.机械能损失了mgH D.机械能损失了mgH
解析:选AC 分析小物块沿斜面上滑,根据题述可知,物块所受滑动摩擦力Ff=0.5mg,由动能定理可知动能损失了+mgH=2mgH,选项A正确,B错误。由功能关系可知机械能损失=mgH,选项C正确,D错误。
3.(多选)如图所示,在绝缘的斜面上方,存在着匀强电场,电场方向平行于斜面向上,斜面上的带电金属块在平行于斜面的力F作用下沿斜面移动。已知金属块在移动的过程中,力F做功32 J,金属块克服电场力做功8 J,金属块克服摩擦力做功16 J,重力势能增加18 J,则在此过程中金属块的( )
A.动能减少10 J B.电势能增加24 J
C.机械能减少24 J D.内能增加16 J
解析:选AD 根据动能定理,合力做功等于动能变化量,则W合=WF+W电+W阻+W重=-10 J,即动能减少10 J;电势能的变化量等于电场力做功,即ΔEp电=-W电=8 J,即电势能增加8 J;机械能的变化量等于除重力以外的其他力做功,即E=WF+W电+W阻=8 J,即机械能增加8 J;内能增加量等于克服摩擦力做功,即16 J。综上所述,A、D正确。
提能点(二) 摩擦力做功与能量的关系
1.两种摩擦力做功的比较
静摩擦力做功
滑动摩擦力做功
只有能量的转移,没有能量的转化
既有能量的转移,又有能量的转化
互为作用力和反作用力的一对静摩擦力所做功的代数和为零,即要么一正一负,要么都不做功
互为作用力和反作用力的一对滑动摩擦力所做功的代数和为负值,即至少有一个力做负功
2.求解相对滑动物体的能量问题的方法
(1)正确分析物体的运动过程,做好受力分析。
(2)利用运动学公式,结合牛顿第二定律分析物体的速度关系及位移关系。
[典例] 如图所示,一个可视为质点的质量为m=1 kg的小物块,从光滑平台上的A
点以v0=2 m/s的初速度水平抛出,到达C点时,恰好沿C点的切线方向进入固定在水平地面上的光滑圆弧轨道,最后小物块滑上紧靠轨道末端D点的质量为M=3 kg的长木板。已知木板上表面与圆弧轨道末端切线相平,木板下表面与水平地面之间光滑,小物块与长木板间的动摩擦因数μ=0.3,圆弧轨道的半径为R=0.4 m,C点和圆弧的圆心连线与竖直方向的夹角θ=60°,不计空气阻力,g取10 m/s2。求:
(1)小物块刚要到达圆弧轨道末端D点时对轨道的压力;
(2)要使小物块不滑出长木板,木板的长度L至少多大?
[解析] (1)小物块在C点时的速度大小
vC=①
小物块由C到D的过程中,由机械能守恒定律得
mgR(1-cos 60°)=mvD2-mvC2②
代入数据解得vD=2 m/s
小球在D点时由牛顿第二定律得
FN-mg=m③
代入数据解得FN=60 N④
由牛顿第三定律得FN′=FN=60 N,方向竖直向下。
(2)设小物块刚好滑到木板左端且达到共同速度的大小为v,滑行过程中,小物块与长木板的加速度大小分别为
a1==μg⑤
a2=⑥
速度分别为v=vD-a1t,v=a2t⑦
对小物块和木板组成的系统,由能量守恒定律得
μmgL=mvD2-(m+M)v2⑧
解得L=2.5 m。⑨
[答案] (1)60 N,方向竖直向下 (2)2.5 m
(1)无论是计算滑动摩擦力做功,还是计算静摩擦力做功,都代入物体相对于地面的位移。
(2)摩擦生热ΔQ=Fs相对中,若物体做往复运动时,则s相对为总的相对路程。
[集训冲关]
1.(多选)如图,质量为M、长度为L的小车静止在光滑水平面上,质量为m的小物块(可视为质点)放在小车的最左端。现用一水平恒力F作用在小物块上,使小物块从静止开始做匀加速直线运动。小物块和小车之间的摩擦力为Ff,小物块滑到小车的最右端时,小车运动的距离为x。此过程中,以下结论正确的是( )
A.小物块到达小车最右端时具有的动能为(F-Ff)(L+x)
B.小物块到达小车最右端时,小车具有的动能为Ffx
C.小物块克服摩擦力所做的功为Ff(L+x)
D.小物块和小车增加的机械能为Fx
解析:选ABC 由动能定理可得小物块到达小车最右端时的动能Ek物=W合=(F-Ff)(L+x),A正确;小车的动能Ek车=Ffx,B正确;小物块克服摩擦力所做的功Wf=Ff(L+x),C正确;小物块和小车增加的机械能为F(L+x)-FfL,D错误。
2.如图甲所示,长木板A放在光滑的水平面上,质量为m=2 kg的另一物体B(可看成质点)以水平速度v0=2 m/s滑上原来静止的长木板A的上表面。由于A、B间存在摩擦,之后A、B速度随时间变化情况如图乙所示,则下列说法正确的是(g取10 m/s2)( )
A.木板获得的动能为2 J B.系统损失的机械能为4 J
C.木板A的最小长度为2 m D.A、B间的动摩擦因数为0.1
解析:选D 由图像可知,A、B的加速度大小都为1 m/s2,根据牛顿第二定律知二者质量相等,木板获得的动能为1 J,选项A错误;系统损失的机械能ΔE=mv02-·2m·v2=2 J,选项B错误;由v t图像可求出二者相对位移为1 m,所以C错误;分析B的受力,根据牛顿第二定律,可求出μ=0.1,选项D正确。
提能点(三) 传送带模型中的功能关系
(1)传送带做的功:W=Fx,其中F为传送带的动力,x为传送带转过的距离。
(2)产生的内能:ΔQ=Ffx相对,其中x相对为相互摩擦的物体与传送带间的相对位移。
(3)功能关系:W=ΔEk+ΔEp+ΔQ。
[典例] 如图所示,传送带与地面的夹角θ=37°,A、B两端间距L=
16 m,传送带以速度v=10 m/s,沿顺时针方向运动,物体m=1 kg,无初速度地放置于A端,它与传送带间的动摩擦因数μ=0.5,(sin 37°=0.6,cos 37°=0.8)试求:
(1)物体由A端运动到B端的时间;
(2)系统因摩擦产生的热量。
[解析] (1)物体刚放上传送带时受到沿斜面向下的滑动摩擦力,由牛顿第二定律得
mgsin θ+μmgcos θ=ma1
设物体经时间t1加速到与传送带同速,则
v=a1t1,x1=a1t12
解得a1=10 m/s2,t1=1 s,x1=5 m
设物体经过时间t2到达B端,因mgsin θ>μmgcos θ,故当物体与传送带同速后,物体将继续加速,即
mgsin θ-μmgcos θ=ma2
L-x1=vt2+at22
解得t2=1 s
故物体由A端运动到B端的时间
t=t1+t2=2 s。
(2)物体与传送带间的相对位移
x相=(vt1-x1)+(L-x1- vt2)=6 m
故Q=μmgcos θ·x相=24 J。
[答案] (1)2 s (2)24 J
传送带模型问题的分析流程
[集训冲关]
1.(多选)如图所示,水平传送带由电动机带动,并始终保持以速度v匀速运动。现将质量为m的某物块无初速地放在传送带的左端,经过时间t物块保持与传送带相对静止。设物块与传送带间的动摩擦因数为μ,对于这一过程,下列说法正确的是( )
A.摩擦力对物块做的功为mv2
B.传送带克服摩擦力做的功为mv2
C.系统摩擦生热为mv2
D.电动机多做的功为mv2
解析:选ACD 设物块与传送带之间的滑动摩擦力大小为Ff,物块的位移大小为x1,物块对传送带摩擦力的作用点对地位移大小为x2,则x1=vt,x2=vt=2x1,对物块运用动能定理有Wf=Ffx1=mv2,选项A正确;传送带克服摩擦力做的功为Wf′=Ffx2=2Ffx1=mv2,选项B错误;系统摩擦生热为Q = Ffx相对=Ff(x2-x1)=Ffx1=mv2,选项C正确;根据能量的转化与守恒定律,电动机多做的功等于物块增加的动能和系统增加的内能之和,即为mv2,选项D正确。
2.如图所示,绷紧的传送带与水平面的夹角θ=30°,皮带在电动机的带动下,始终保持v0=2 m/s的速率运行,现把一质量为m=10 kg的工件(可看做质点)轻轻放在皮带的底端,经过时间1.9 s,工件被传送到h=1.5 m的高处,g取10 m/s2,求:
(1)工件与传送带间的动摩擦因数;
(2)电动机由于传送工件多消耗的电能。
解析:(1)由题图可知,皮带长x==3 m。
工件速度达v0前,做匀加速运动的位移x1= t1=t1
匀速运动的位移为x-x1=v0(t-t1)
解得加速运动的时间t1=0.8 s
加速运动的位移x1=0.8 m
所以加速度a==2.5 m/s2
由牛顿第二定律有:μmgcos θ-mgsin θ=ma
解得:μ=。
(2)从能量守恒的观点,显然电动机多消耗的电能用于增加工件的动能、势能以及克服传送带与工件之间发生相对位移时摩擦力做功产生的热量。
在时间t1内,皮带运动的位移
x皮=v0t1=1.6 m
在时间t1内,工件相对皮带的位移
x相=x皮-x1=0.8 m
在时间t1内,摩擦生热
Q=μmgcos θ·x相=60 J
工件获得的动能Ek=mv02=20 J
工件增加的势能Ep=mgh=150 J
电动机多消耗的电能W=Q+Ek+Ep=230 J。
答案:(1) (2)230 J
提能点(四) 能量转化与守恒的应用
1.对能量守恒定律的两点理解
(1)某种形式的能量减少,一定存在其他形式的能量增加,且减少量和增加量一定相等。
(2)某个物体的能量减少,一定存在其他物体的能量增加,且减少量和增加量一定相等。
2.能量转化问题的解题思路
首先确定初、末状态,然后分析状态变化过程中哪种形式的能量减少,哪种形式的能量增加,求出减少的能量总和ΔE减与增加的能量总和ΔE增,最后由ΔE减=ΔE增列式求解。
[典例] 如图所示,固定斜面的倾角θ=30°,物体A与斜面之间
的动摩擦因数为μ=,轻弹簧下端固定在斜面底端,弹簧处于原长时上端位于C点,用一根不可伸长的轻绳通过轻质光滑的定滑轮连接物体A和B,滑轮右侧绳子与斜面平行,A的质量为2m=4 kg,B的质量为m=2 kg,初始时物体A到C点的距离为L=1 m,现给A、B一初速度v0=3 m/s,使A开始沿斜面向下运动,B向上运动,物体A将弹簧压缩到最短后又恰好能弹到C点。已知重力加速度取g=10 m/s2,不计空气阻力,整个过程中轻绳始终处于伸直状态,求此过程中:
(1)物体A向下运动刚到C点时的速度大小;
(2)弹簧的最大压缩量;
(3)弹簧中的最大弹性势能。
[解析] (1)物体A向下运动刚到C点的过程中,对A、B组成的系统应用能量守恒定律可得:
μ·2mgcos θ·L=·3mv02-·3mv2+2mgLsin θ-mgL
可解得v=2 m/s。
(2)以A、B组成的系统,在物体A将弹簧压缩到最大压缩量,又返回到C点的过程中,系统动能的减少量等于因摩擦产生的热量,
即:·3mv2-0=μ·2mgcos θ·2x
其中x为弹簧的最大压缩量
解得x=0.4 m。
(3)设弹簧的最大弹性势能为Epm
由能量守恒定律可得:
·3mv2+2mgxsin θ-mgx=μ·2mgcos θ·x+Epm
解得:Epm=6 J。
[答案] (1)2 m/s (2)0.4 m (3)6 J
涉及弹簧的能量问题的解题方法
两个或两个以上的物体与弹簧组成的系统相互作用的过程,具有以下特点:
(1)能量变化上,如果只有重力和系统内弹簧弹力做功,系统机械能守恒。
(2)如果系统每个物体除弹簧弹力外所受合外力为零,则当弹簧伸长或压缩到最大程度时两物体速度相同。
(3)当水平弹簧为自然状态时系统内某一端的物体具有最大速度。
[集训冲关]
1.如图所示,重10 N的滑块在倾角为30°的斜面上,从a点由静止开始下滑,到b点开始压缩轻弹簧,到c点时达到最大速度,到d点(图中未画出)开始弹回,在b点离开弹簧,并恰能再回到a点。若bc=0.1 m,弹簧弹性势能的最大值为8 J,则下列说法正确的是( )
A.轻弹簧的劲度系数为50 N/m
B.从d点到b点滑块克服重力做功8 J
C.从d点到c点弹簧的弹力对滑块做功8 J
D.滑块的最大动能为8 J
解析:选A 滑块还能回到a点,说明斜面是光滑的。滑块在c点速度最大,所受合力为零,由平衡条件和胡克定律有kxbc=mgsin 30°,解得k=50 N/m,A项正确;从d点到b点的过程中,8 J的弹性势能一部分转化为重力势能,一部分转化为动能,所以克服重力做功小于8 J,B项错误;从d点到c点的过程中,弹性势能减少量小于8 J,所以弹力对滑块做功小于8 J,C项错误;小于8 J的弹性势能一部分转化为重力势能、一部分转化为动能,故到c点时最大动能一定小于8 J,D项错误。
2.(多选)(2015·江苏高考)如图所示,轻质弹簧一端固定,另一端与一质量为m、套在粗糙竖直固定杆A处的圆环相连,弹簧水平且处于原长。圆环从A处由静止开始下滑,经过B处的速度最大,到达C处的速度为零,AC=h。圆环在C处获得一竖直向上的速度v,恰好能回到A。弹簧始终在弹性限度内,重力加速度为g。则圆环( )
A.下滑过程中,加速度一直减小
B.下滑过程中,克服摩擦力做的功为mv2
C.在C处,弹簧的弹性势能为mv2-mgh
D.上滑经过B的速度大于下滑经过B的速度
解析:选BD 圆环下落时,先加速,在B位置时速度最大,加速度减小至零。从B到C圆环减速,加速度增大,方向向上,A错误;圆环下滑时,设克服摩擦力做功为Wf,弹簧的最大弹性势能为ΔEp,由A到C的过程中,根据能量关系有mgh=ΔEp+Wf。由C到A的过程中,有mv2+ΔEp=Wf+mgh。联立解得Wf=mv2,ΔEp=mgh-mv2,B正确,C错误;设圆环在B位置时,弹簧的弹性势能为ΔEp′,根据能量守恒,A到B的过程有mvB2+ΔEp′+Wf′=mgh′,B到A的过程有mvB′2+ΔEp′=mgh′+Wf′,比较两式得vB′>vB,D正确。
3.(2017·滁州质检)如图所示,光滑曲面AB与水平面BC平滑连接于B点,BC右端连接内壁光滑、半径为r的细圆管CD,管口D端正下方直立一根劲度系数为k的轻弹簧,轻弹簧一端固定,另一端恰好与管口D端平齐。质量为m的滑块在曲面上距BC高度为2r处由静止开始下滑,滑块与BC间的动摩擦因数μ=,进入管口C端时与圆管恰好无作用力,通过CD后压缩弹簧,在压缩弹簧过程中滑块速度最大时弹簧的弹性势能为Ep。求:
(1)滑块到达B点时的速度大小vB;
(2)水平面BC的长度x;
(3)在压缩弹簧过程中滑块的最大速度vm。
解析:(1)滑块在曲面的下滑过程,由动能定理得
mg·2r=mvB2
解得vB=2。
(2)在C点,滑块与圆管之间恰无作用力,则
mg=m
解得vC=
滑块从开始下滑处运动到C点过程,由动能定理得
mg·2r-μmgx=mvC2
解得x=3r。
(3)设在压缩弹簧过程中速度最大时,滑块离D端的距离为x0,
此时kx0=mg
解得x0=
滑块由C点运动到距离D端x0处的过程中,由能量守恒得
mg(r+x0)=mvm2-mvC2+Ep
联立解得vm= 。
答案:(1)2 (2)3r (3)
一、单项选择题
1.力对物体做功100 J,下列说法正确的是( )
A.物体具有的能量增加100 J
B.物体具有的能量减少100 J
C.有100 J的能量发生了转化
D.产生了100 J的能量
解析:选C 由于物体是否对外做功未知,因此无法判断物体具有的能量的变化,A、B错误;功是能量转化的量度,故C正确,D错误。
2.(2016·上海高考)在今年上海的某活动中引入了全国首个户外风洞飞行体验装置,体验者在风力作用下漂浮在半空。若减小风力,体验者在加速下落过程中( )
A.失重且机械能增加 B.失重且机械能减少
C.超重且机械能增加 D.超重且机械能减少
解析:选B 据题意,体验者漂浮时受到的重力和风力平衡;在加速下降过程中,风力小于重力,即重力对体验者做正功,风力做负功,体验者的机械能减小;加速下降过程中,加速度方向向下,体验者处于失重状态,故选项B正确。
3.从地面竖直上抛一个质量为m的小球,小球上升的最大高度为h。设上升和下降过程中空气阻力大小恒定为Ff。下列说法正确的是( )
A.小球上升的过程中动能减少了mgh
B.小球上升和下降的整个过程中机械能减少了Ffh
C.小球上升的过程中重力势能增加了mgh
D.小球上升和下降的整个过程中动能减少了Ffh
解析:选C 小球在上升过程中的动能减少量等于克服合力做的功,即ΔEk=(mg+Ff)h,A错误;整个过程中的机械能减少量(动能减少量)等于克服除重力之外其他力做的功,即ΔE=2Ffh,B、D错误;上升过程中重力势能增加量等于克服重力做的功,即ΔEp=mgh,C正确。
4.(2017·济宁月考)如图所示,A、B、C三个一样的滑块从粗糙斜面上的同一高度同时开始运动,A由静止释放,B的初速度方向沿斜面向下,大小为v0,C的初速度方向沿斜面水平,大小也为v0。下列说法中正确的是( )
A.A和C将同时滑到斜面底端
B.滑到斜面底端时,B的机械能减少最多
C.滑到斜面底端时,B的动能最大
D.滑到斜面底端时,C的重力势能减少最多
解析:选C 滑块A和C通过的路程不同,在沿斜面方向的加速度大小也不相同,故A错;三个滑块滑到底端时重力势能减少量相同,故D错;滑块A和B滑到底端时经过的位移相等,克服摩擦力做功相等,而滑块C的路程较大,机械能减少得较多,故B错、C对。
5.如图所示,质量m=10 kg和M=20 kg的两物块,叠放在光滑水平面上,其中物块m通过处于水平方向的轻弹簧与竖直墙壁相连,初始时刻,弹簧处于原长状态,弹簧的劲度系数k=250 N/m。现用水平力F作用在物块M上,使其缓慢地向墙壁移动,当移动40 cm时,两物块间开始相对滑动,在相对滑动前的过程中,下列说法中正确的是( )
A.M受到的摩擦力保持不变
B.物块m受到的摩擦力对其不做功
C.推力做的功等于弹簧增加的弹性势能
D.开始相对滑动时,推力F的大小等于200 N
解析:选C 对物块m进行受力分析,水平方向受向右的弹簧弹力和向左的静摩擦力。由于弹簧在缩短,所以弹力越来越大,由于缓慢地向墙壁移动,物体处于平衡状态,M对m的摩擦力也在增大,所以M受到的摩擦力在增大,A错误;物块m受到的摩擦力方向向左,m向左运动,所以摩擦力做正功,B错误;把m和M看成整体进行受力分析,水平方向受向右的弹簧弹力和向左的推力,当移动40 cm时,两物块间开始相对滑动,根据胡克定律得
F=kx=100 N,对整体研究,根据动能定理得WF+W弹=ΔEk=0,弹簧弹力做功等于弹性势能的变化,WF=-W弹=ΔEp,所以推力做的功等于弹簧增加的弹性势能,C正确,D错误。
6.(2017·大连质检)一足够长的传送带与水平面的夹角为θ,传送带以一定的速度匀速运动。某时刻在传送带适当的位置放上具有一定初速度的物块(如图甲所示),以此时为t=0时刻,作出小物块之后在传送带上的运动速度随时间的变化关系,如图乙所示(图中取沿斜面向下的运动方向为正方向,其中v1>v2)。已知传送带的速度保持不变,g取10 m/s2,则( )
A.0~t1时间内,物块对传送带做正功
B.物块与传送带间的动摩擦因数μm2。
(2)要使小球做平抛运动,则斜槽的末端必须水平。
(3)为使小球离开轨道时的初速度相等,每次释放小球时应从同一高度由静止释放,故步骤D不完善;两球离开轨道后做平抛运动,它们抛出点的高度相等,在空中的运动时间t相等,若碰撞过程动量守恒,则有:m1v1=m1v1′+m2v2′,两边同乘以t得:m1v1t=m1v1′t+m2v2′t,
即为:m1=m1+m2(-d),故步骤F错误。
[答案] (1)> (2)斜槽末端切线水平 (3)D不完善,小球1应从斜槽的同一高度由静止释放; F错误,应验证:m1OP=m1OM+m2(ON-d)
考点(二) 实验数据的处理
[例2]
为了验证动量守恒定律(探究碰撞中的不变量),某同学选取了两个材质相同、体积不等的立方体滑块A和B,按下述步骤进行实验:
步骤1:在A、B的相撞面分别装上橡皮泥,以便二者相撞以后能够立刻结为整体;
步骤2:安装好实验装置如图,铝质轨道槽的左端是倾斜槽,右端是长直水平槽。倾斜槽和水平槽由一小段圆弧连接,轨道槽被固定在水平桌面上,在轨道槽的侧面与轨道等高且适当远处装一台数码频闪照相机;
步骤3:让滑块B静置于水平槽的某处,滑块A从斜槽某处由静止释放,同时开始频闪拍摄,直到A、B停止运动,得到一幅多次曝光的数码照片;
步骤4:多次重复步骤3,得到多幅照片,挑出其中最理想的一幅,打印出来,将刻度尺紧靠照片放置,如图所示。
(1)由图分析可知,滑块A与滑块B碰撞发生的位置________。
①在P5、P6之间
②在P6处
③在P6、P7之间
(2)为了探究碰撞中动量是否守恒,需要直接测量或读取的物理量是________。
①A、B两个滑块的质量m1和m2
②滑块A释放时距桌面的高度
③频闪照相的周期
④照片尺寸和实际尺寸的比例
⑤照片上测得的s45、s56和s67、s78
⑥照片上测得的s34、s45、s56和s67、s78、s89
⑦滑块与桌面间的动摩擦因数
写出验证动量守恒的表达式___________________________________________。
[解析] (1)由题图可知s12=3.00 cm,s23=2.80 cm,s34=2.60 cm,s45=2.40 cm,s56=2.20 cm,s67=1.60 cm,s78=1.40 cm,s89=1.20 cm。根据匀变速直线运动的特点可知A、B相撞的位置在P6处。
(2)为了探究A、B相撞前后动量是否守恒,就要得到碰撞前后的动量,所以要测量A、B两个滑块的质量m1、m2和碰撞前后的速度。设照相机拍摄时间间隔为T,则P4处的速度为v4=,P5处的速度为v5=,因为v5=,所以A、B碰撞前A在P6
处的速度为v6=;同理可得碰撞后AB在P6处的速度为v6′=。若动量守恒则有m1v6=(m1+m2)v6′,整理得m1(s45+2s56-s34)=(m1+m2)(2s67+s78-s89)。因此需要测量或读取的物理量是①⑥。
[答案] (1)② (2)①⑥ m1(s45+2s56-s34)=(m1+m2)(2s67+s78-s89)
本例题的实验设计与[理清实验要点]中[方案三]类似,只是测定速度的方式由打点纸带换成了频闪照片。
本实验可以说千变万化,比如[理清实验要点]中就列举了四种方案,每种方案的[实验器材]和[实验步骤]各不相同,就连[数据数理]中要验证的表达式也不尽相同,其中前三个方案需要测出速度,而[方案四]只需要测量长度。但不论实验如何设计,都“万变不离其宗”,“宗”指的是[实验原理]。
[例3] 气垫导轨是常用的一种实验仪器,它是利用气泵使带孔的导轨与滑块之间形成气垫,使滑块悬浮在导轨上,滑块在导轨上的运动可视为没有摩擦。我们可以用带竖直挡板C、D的气垫导轨和滑块A、B探究碰撞中的不变量,实验装置如图所示(弹簧的长度忽略不计)。
采用的实验步骤如下:
a.用天平分别测出滑块A、B的质量mA、mB;
b.调整气垫导轨,使导轨处于水平;
c.在A和B间放入一个被压缩的轻弹簧,用电动卡销锁定,静止放置在气垫导轨上;
d.用刻度尺测出A的左端至挡板C的距离L1;
e.按下电钮放开卡销,同时分别记录滑块A、B运动时间的计时器开始工作,当A、B滑块分别碰撞挡板C、D时计时结束,记下A、B分别到达C、D的运动时间t1和t2。
(1)实验中还应测量的物理量及其符号是____________________________。
(2)作用前A、B两滑块质量与速度乘积之和为________;作用后A、B两滑块质量与速度乘积之和为__________________________________________________。
(3)作用前、后A、B两滑块质量与速度乘积之和并不完全相等,产生误差的原因有________________________________________________________________________
________________________________________________________________________(至少答出两点)。
[解析] A、B
两滑块被压缩的弹簧弹开后,在气垫导轨上运动时可视为匀速运动,因此只要测出A与C的距离L1、B与D的距离L2及A到C、B到D的时间t1和t2,测出两滑块的质量,就可以探究碰撞中的不变量。
(1)实验中还应测量的物理量为B的右端至挡板D的距离L2。
(2)设向左为正方向,根据所测数据求得两滑块的速度分别为vA=,vB=-。
碰前两滑块静止,即v=0,质量与速度乘积之和为零,碰后两滑块的质量与速度乘积之和为mAvA+mBvB=mA-mB。
(3)产生误差的原因:
①L1、L2、t1、t2、mA、mB的数据测量误差;
②没有考虑弹簧推动滑块的加速过程;
③滑块并不是做标准的匀速直线运动,滑块与导轨间有少许摩擦力;
④气垫导轨不完全水平。
[答案] (1)B的右端至挡板D的距离L2
(2)0 mA-mB (3)见解析
(1)解答这类题目的关键是弄清实验原理,如本题的关键是求出A、B分开时各自的质量m和速度v的乘积,通过比较两个乘积的大小关系得出实验结论。
(2)本实验既有系统误差,又有偶然误差,如导轨不水平、滑块与导轨间仍存在摩擦、弹簧有作用时间等,都会对实验结果产生影响。
[创新演练]
某同学设计了一个用电磁打点计时器验证动量守恒定律的实验:在小车A的前端粘有橡皮泥,推动小车A使之做匀速直线运动,然后与原来静止在前方的小车B相碰并粘合成一体,继续做匀速直线运动。他设计的装置如图甲所示。在小车A后连着纸带,电磁打点计时器所用电源频率为50 Hz,长木板下垫着薄木片以平衡摩擦力。
(1)若已测得打点纸带如图乙所示,并测得各计数点间距(已标在图上)。A为运动的起点,则应选__________段来计算A碰前的速度。应选__________段来计算A和B碰后的共同速度(以上两空选填“AB”或“BC”或“CD”或“DE”)。
(2)已测得小车A的质量m1 = 0.4 kg,小车B的质量为m2=0.2 kg,则碰前两小车的总动量为________ kg·m/s,碰后两小车的总动量为________ kg·m/s。
解析:(1)从分析纸带上打点的情况看,BC段既表示小车做匀速运动,又表示小车有较大速度,因此BC段能较准确地描述小车A在碰撞前的运动情况,应选用BC段计算小车A碰前的速度。从CD段打点的情况看,小车的运动情况还没稳定,而在DE段内小车运动稳定,故应选用DE段计算A和B碰后的共同速度。
(2)小车A在碰撞前的速度
v0== m/s=1.050 m/s
小车A在碰撞前的动量
p0=m1v0=0.4×1.050 kg·m/s=0.420 kg·m/s
碰撞后A、B的共同速度
v== m/s=0.695 m/s
碰撞后A、B的总动量
p=(m1+m2)v=(0.2+0.4)×0.695 kg·m/s=0.417 kg·m/s。
答案:(1)BC DE (2)0.420 0.417
1.(多选)在利用悬线悬挂等大小球进行验证动量守恒定律的实验中,下列说法正确的是( )
A.悬挂两球的细绳长度要适当,且等长
B.由静止释放小球以便较准确地计算小球碰前的速度
C.两小球必须都是刚性球,且质量相同
D.两小球碰后可以粘合在一起共同运动
解析:选ABD 两绳等长能保证两球正碰,以减小实验误差,A正确;由于计算碰撞前速度时用到了mgh=mv2-0,即初速度为零,B正确;本实验中对小球的弹性性能无要求,C错误;两球正碰后,有各种运动情况,所以D正确。
2.如图为实验室常用的气垫导轨验证动量守恒的装置。两带有等宽遮光条的滑块A和B,质量分别为mA、mB,在A、B间用细线水平压住一轻弹簧,将其置于气垫导轨上,调节导轨使其能实现自由静止,这是表明________________,烧断细线,滑块A、B被弹簧弹开,光电门C、D记录下两遮光条通过的时间分别为tA和tB,若有关系式________________,则说明该实验动量守恒。
解析:滑块在导轨上能自由静止,说明导轨水平,因为滑块在气垫导轨上所受阻力忽略不计,认为是零,若上述过程A、B系统动量守恒,则有:mAvA=mBvB,又由于两遮光条等宽,则=或-=0。
答案:气垫导轨水平 =或-=0
3.利用气垫导轨做实验来验证动量守恒定律:开始时两个滑块静止,它们之间有一根被压缩的轻弹簧,滑块用绳子连接,绳子烧断后,两个滑块向相反方向运动。得到如图所示的两个滑块A、B相互作用后运动过程的频闪照片,频闪的频率为10 Hz。已知滑块A、B的质量分别为200 g、300 g,根据照片记录的信息,A、B离开弹簧后,A滑块做匀速直线运动,其速度大小为________ m/s,本次实验中得出的结论是__________________________。
解析:由题图可知,细绳烧断后,A、B均做匀速直线运动。开始时有:vA=0,vB=0,A、B被弹开后有:vA′= m/s=0.09 m/s,vB′= m/s=0.06 m/s,mAvA′=0.2×0.09 kg·m/s=0.018 kg·m/s,mBvB′=0.3×0.06 kg·m/s=0.018 kg·m/s,由此可得mAvA′=mBvB′,即0=mBvB′-mAvA′。结论是:两滑块组成的系统在相互作用过程中动量守恒。
答案:0.09 两滑块组成的系统在相互作用过程中动量守恒
4.如图,用“碰撞实验器”可以验证动量守恒定律,即研究两个小球在轨道水平部分碰撞前后的动量关系。
(1)实验中,直接测定小球碰撞前后的速度是不容易的。但是,可以通过仅测量________(填选项前的符号),间接地解决这个问题。
A.小球开始释放高度h
B.小球抛出点距地面的高度H
C.小球做平抛运动的射程
(2)图中O点是小球抛出点在地面上的垂直投影,实验时先让入射球m1多次从斜轨上S位置静止释放,找到其平均落地点的位置P,测量平抛射程OP,然后,把被碰小球m2静置于轨道的水平部分,再将入射球m1从斜轨上S位置静止释放,与小球m2相碰,并多次重复。
接下来要完成的必要步骤是________。(填选项前的符号)
A.用天平测量两个小球的质量m1、m2
B.测量小球m1开始释放高度h
C.测量抛出点距地面的高度H
D.分别找到m1、m2相碰后平均落地点的位置M、N
E.测量平抛射程OM、ON
(3)若两球相碰前后的动量守恒,其表达式可表示为_______________[用(2)中测量的量表示];
若碰撞是弹性碰撞,那么还应满足的表达式为__________________[用(2)中测量的量表示]。
解析:(1)小球碰前和碰后的速度都用平抛运动来测定,即v=。而由H=gt2知,每次竖直高度相等,平抛时间相等,即m1=m1+m2,则可得m1·OP=m1·OM+m2·ON。故只需测射程,因而选C。
(2)由表达式知:在OP已知时,需测量m1、m2、OM和ON,故必要步骤A、D、E。
(3)若为弹性碰撞同时满足动能守恒。
m12=m12+m22
即m1·OP2=m1·OM2+m2·ON2。
答案:(1)C (2)ADE (3)m1·OM+m2·ON=m1·OP m1·OM2+m2·ON2=m1·OP2
5.如图是用来验证动量守恒的实验装置,弹性球1用细线悬挂于O点,O点下方桌子的边沿有一竖直立柱。实验时,调节悬点,使弹性球1静止时恰与立柱上的球2接触且两球等高。将球1拉到A点,并使之静止,同时把球2放在立柱上。释放球1,当它摆到悬点正下方时与球2发生对心碰撞,碰后球1向左最远可摆到B点,球2落到水平地面上的C点。测出有关数据即可验证1、2两球碰撞时动量守恒。现已测出A点离水平桌面的距离为a、B点离水平桌面的距离为b,C点与桌子边沿间的水平距离为c。此外,
(1)还需要测量的量是________、________和________。
(2)根据测量的数据,该实验中动量守恒的表达式为______________。(忽略小球的大小)
解析:(1)要验证动量守恒必须知道两球碰撞前后的动量变化,根据弹性球1碰撞前后的高度a和b,由机械能守恒可以求出碰撞前后的速度,故只要再测量弹性球1的质量m1,就能求出弹性球1的动量变化;根据平抛运动的规律只要测出立柱高h和桌面高H就可以求出弹性球2碰撞前后的速度变化,故只要测量弹性球2的质量和立柱高h、桌面高H就能求出弹性球2的动量变化。
(2)根据(1)的解析可以写出动量守恒的方程
2m1=2m1+m2。
答案:(1)弹性球1、2的质量m1、m2 立柱高h 桌面高H
(2)2m1=2m1+m2
6.(2014·全国卷Ⅱ)现利用图(a)所示的装置验证动量守恒定律。在图(a)中,气垫导轨上有A、B两个滑块,滑块A右侧带有一弹簧片,左侧与打点计时器(图中未画出)的纸带相连;滑块B左侧也带有一弹簧片,上面固定一遮光片,光电计时器(未完全画出)可以记录遮光片通过光电门的时间。
实验测得滑块A的质量m1=0.310 kg,滑块B的质量m2=0.108 kg,遮光片的宽度d=1.00 cm;打点计时器所用交流电的频率f=50.0 Hz。
将光电门固定在滑块B的右侧,启动打点计时器,给滑块A一向右的初速度,使它与B相碰。碰后光电计时器显示的时间为ΔtB=3.500 ms,碰撞前后打出的纸带如图(b)所示。
若实验允许的相对误差绝对值(×100%)最大为5%,本实验是否在误差范围内验证了动量守恒定律?写出运算过程。
解析:按定义,滑块运动的瞬时速度大小
v= ①
式中Δs为滑块在很短时间Δt内走过的路程。
设纸带上打出相邻两点的时间间隔为ΔtA,则
ΔtA==0.02 s ②
ΔtA可视为很短。
设滑块A在碰撞前、后瞬时速度大小分别为v0、v1。将②式和图给实验数据代入①
式得
v0=2.00 m/s ③
v1=0.970 m/s ④
设滑块B在碰撞后的速度大小为v2,由①式有
v2= ⑤
代入题给实验数据得
v2=2.86 m/s ⑥
设两滑块在碰撞前、后的总动量分别为p和p′,则
p=m1v0 ⑦
p′=m1v1+m2v2 ⑧
两滑块在碰撞前后总动量相对误差的绝对值为
δp=×100% ⑨
联立③④⑥⑦⑧⑨式并代入有关数据,得
δp=1.7%<5% ⑩
因此,本实验在允许的误差范围内验证了动量守恒定律。
答案:见解析
7.(2016·海南高考)如图,物块A通过一不可伸长的轻绳悬挂在天花板下,初始时静止;从发射器(图中未画出)射出的物块B沿水平方向与A相撞,碰撞后两者粘连在一起运动;碰撞前B的速度的大小v及碰撞后A和B一起上升的高
度h均可由传感器(图中未画出)测得。某同学以h为纵坐标,v2为横坐标,利用实验数据作直线拟合,求得该直线的斜率为k=1.92×10-3 s2/m。已知物块A和B的质量分别为mA=0.400 kg和mB=0.100 kg,重力加速度大小g=9.80 m/s2。
(1)若碰撞时间极短且忽略空气阻力,求hv2直线斜率的理论值k0;
(2)求k值的相对误差δ(δ=×100%,结果保留1位有效数字)。
解析:(1)设物块A和B碰撞后共同运动的速度为v′,由动量守恒定律有
mBv=(mA+mB)v′①
在碰后A和B共同上升的过程中,由机械能守恒定律有
(mA+mB)v′2=(mA+mB)gh②
联立①②式得h=v2③
由题意得k0=④
代入题给数据得k0=2.04×10-3s2/m。⑤
(2)按照定义δ=×100%⑥
由⑤⑥式和题给条件得δ=6%。⑦
答案:(1)2.04×10-3 s2/m (2)6%
一、选择题(在每小题给出的四个选项中,第1~4题只有一项符合题目要求,第5~8题有多项符合题目要求)
1.如图所示是一种清洗车辆用的手持喷水枪。设枪口截面积为0.6 cm2,喷出水的速度为 20 m/s (水的密度为1×103 kg/m3)。当它工作时,估计水枪的功率约为( )
A.250 W B.300 W
C.350 W D.400 W
解析:选A 每秒钟喷出水的动能为Ek=mv2=ρSvt·v2,代入数据得Ek=240 J,故选项A正确。
2.如图所示,在高1.5 m的光滑平台上有一个质量为2 kg的小球被一细线拴在墙上,小球与墙之间有一根被压缩的轻质弹簧。当烧断细线时,小球被弹出,小球落地时的速度方向与水平方向成60°角,则弹簧被压缩时具有的弹性势能为(g=10 m/s2)( )
A.10 J B.15 J
C.20 J D.25 J
解析:选A 由2gh=vy2-0得:vy=,即vy= m/s,落地时,tan 60°=可得:v0== m/s,由机械能守恒定律得Ep=mv02,可求得:Ep=10 J,故A正确。
3.如图所示,两物体A、B用轻质弹簧相连静止在光滑水平面上,现同时对A、B两物体施加等大反向的水平恒力F1、F2,使A、B同时由静止开始运动。在以后的运动过程中,关于A、B两物体与弹簧组成的系统,下列说法正确的是(整个过程中弹簧不超过其弹性限度)( )
A.由于F1、F2所做的总功为零,所以系统的机械能始终不变
B.当A、B两物体之间的距离减小时,系统的机械能增大
C.当弹簧伸长到最长时,系统的机械能最大
D.当弹簧弹力的大小与F1、F2的大小相等时,A、B两物体速度为零
解析:选C 从开始状态到弹簧拉到最长过程中,两拉力方向与其受力物体位移方向均相同,做正功,由功能关系可知,系统机械能增大,A项错;当两物体之间距离减小即A、B相向运动,力F1和F2做负功,系统机械能减小,B项错误;当弹簧伸长到最长时,力F1和F2做正功最多,故系统机械能最大,C项正确;分别对A、B应用动能定理,从开始到弹力与外力相等时,合外力分别对A、B做正功,两物体动能增加,速度一定大于零,D项错误。
4.(2017·合肥质检)如图所示,水平传送带保持2 m/s的速度运动,一质量为1 kg的物体与传送带间的动摩擦因数为0.2,现将该物体无初速度地放到传送带上的A点,然后运动到了距A点2 m的B点,则传送带对该物体做的功为( )
A.0.5 J B.2 J
C.2.5 J D.4 J
解析:选B 由题意知,物体的加速度a=μg=2 m/s2。物体在传送带上匀加速运动的位移x==1 m,又因为xAB=2 m,所以物体先做匀加速运动后做匀速运动,由动能定理知传送带对物体做功W = mv2=2 J,B正确。
5.静止在湖面上的小船中有两人分别向相反方向水平抛出质量相同的小球,先将甲球向左抛,后将乙球向右抛。抛出时两小球相对于河岸的速率相等,水对船的阻力忽略不计,则下列说法正确的是( )
A.两球抛出后,船向左以一定速度运动
B.两球抛出后,船向右以一定速度运动
C.两球抛出后,船的速度为0
D.抛出时,人给甲球的冲量比人给乙球的冲量大
解析:选CD 水对船的阻力忽略不计,根据动量守恒定律,两球抛出前,由两球、人和船组成的系统总动量为0,两球抛出后的系统总动量也是0。两球质量相等,速度大小相等,方向相反,合动量为0,船的动量也必为0,船的速度必为0。具体过程是:当甲球向左抛出后,船向右运动,乙球抛出后,船静止。人给甲球的冲量I甲=mv-0,人给乙球的冲量I2=mv-mv′,v′是甲球抛出后的船速,方向向右,所以乙球的动量变化量小于甲球的动量变化量,乙球所受冲量也小于甲球所受冲量。
6.有一系列斜面,倾角各不相同,它们的底端相同,都是O点,如图所示。有一些完全相同的滑块(可视为质点)从这些斜面上的A、B、C、D…
各点同时由静止释放,下列判断正确的是( )
A.若各斜面均光滑,且这些滑块到达O点的速率相同,则A、B、C、D…各点处在同一水平线上
B.若各斜面均光滑,且这些滑块到达O点的速率相同,则A、B、C、D…各点处在同一竖直面内的圆周上
C.若各斜面均光滑,且这些滑块到达O点的时间相同,则A、B、C、D…各点处在同一竖直面内的圆周上
D.若各斜面与这些滑块间有相同的动摩擦因数,滑到O点的过程中,各滑块损失的机械能相同,则A、B、C、D…各点处在同一竖直线上
解析:选ACD 由机械能守恒可知A正确、B错误;若A、B、C、D…各点在同一竖直平面内的圆周上,则下滑时间均为t= ,d为直径,因此选项C正确;设斜面和水平面间夹角为θ,损失的机械能为ΔE=μmgxcos θ,损失机械能相同,则xcos θ相同,因此A、B、C、D…各点在同一竖直线上,D正确。
7.如图所示,n个完全相同,边长足够小且互不粘连的小方块依次排列,总长度为l,总质量为M,它们一起以速度v在光滑水平面上滑动,某时刻开始滑上粗糙水平面。小方块与粗糙水平面之间的动摩擦因数为μ,若小方块恰能完全进入粗糙水平面,则所有小方块克服摩擦力做功为( )
A.Mv2 B.Mv2
C.μMgl D.μMgl
解析:选AC 小方块恰能完全进入粗糙水平面,说明小方块进入粗糙水平面后速度为零。以所有小方块为研究对象,由动能定理可知,所有小方块克服摩擦力做功Wf=Mv2,A项正确;将所有小方块等效为质量集中在重心的质点,恰能完全进入粗糙水平面,重心位移为l,且在大小的位移上存在摩擦力,所以克服摩擦力做功为μMgl,C正确。
8.(2017·宜兴模拟)如图所示,一个表面光滑的斜面体M置于水平地面上,它的两个斜面与水平面的夹角分别为α、β,且α<β,M的顶端装有一定滑轮,一轻质细绳跨过定滑轮后连接A、B
两个小滑块,细绳与各自的斜面平行,不计绳与滑轮间的摩擦,A、B恰好在同一高度处于静止状态。剪断细绳后,A、B滑至斜面底端,M始终保持静止,则( )
A.滑块A的质量大于滑块B的质量
B.两滑块到达斜面底端时的速率相同
C.两滑块到达斜面底端时,滑块A重力的瞬时功率较大
D.两滑块到达斜面底端所用时间相同
解析:选AB 根据题意,由于A、B物体均处于平衡状态,有FTA=FTB,而FTA=mAgsin α,FTB=mBgsin β,所以mA大于mB,A正确;由于A、B物体距离地面的高度h相同,据机械能守恒定律可知两者到达地面的速率v相同,B正确;两者到达地面时重力的瞬时功率为PA=mAgvsin α,PB=mBgvsin β,所以PA=PB,C错误;两者到达地面的时间为=,=,有tA大于tB,D错误。
二、实验题
9.(2017·深圳模拟)某同学用如图甲所示装置来探究“动能定理”,得到一条如图乙所示的纸带,O点为第一个点,并在纸带清晰段依次标记了A、B、C三个点,用毫米刻度尺测得各点到O点的距离如图,重物质量m=1.00 kg。
(1)电火花打点计时器应选择以下哪种电源________。
A.4~6 V、50 Hz交流电源
B.220 V、50 Hz交流电源
(2)从O点到B点,重物的重力做功W重=________J,动能的增加量ΔEk=________J。(g取10 m/s2,以上计算结果均保留三位有效数字)
解析:(1)电火花打点计时器使用220 V、50 Hz的交流电源,所以选项B正确。
(2)从O点到B点,重物的重力做功WG=mgh=1.00×10×0.777 6 J≈7.78 J,B点的速度
vB== m/s=3.895 m/s,
B点的动能EkB=mvB2≈7.59 J
动能的增加量ΔEk=EkB-0=7.59 J。
答案:(1)B (2)7.78 7.59
10.某同学利用打点计时器和气垫导轨做“验证动量守恒定律”的实验,气垫导轨装置如图甲所示,所用的气垫导轨装置由导轨、滑块、弹射架等组成。在空腔导轨的两个工作面上均匀分布着一定数量的小孔,向导轨空腔内不断通入压缩空气,空气会从小孔中喷出,使滑块稳定地飘浮在导轨上,这样就大大减小了因滑块和导轨之间的摩擦而引起的误差。
(1)下面是实验的主要步骤:
①安装好气垫导轨,调节气垫导轨的调节旋钮,使导轨水平;
②向气垫导轨空腔内通入压缩空气;
③把打点计时器固定在紧靠气垫导轨左端弹射架的外侧,将纸带穿过打点计时器和弹射架并固定在滑块1的左端,调节打点计时器的高度,直至滑块拖着纸带移动时,纸带始终在水平方向;
④使滑块1挤压导轨左端弹射架上的橡皮绳;
⑤把滑块2放在气垫导轨的中间;
⑥先__________________,然后________________,让滑块带动纸带一起运动;
⑦取下纸带,重复步骤④⑤⑥,选出理想的纸带如图乙所示;
⑧测得滑块1的质量为310 g,滑块2(包括橡皮泥)的质量为205 g。
完善实验步骤⑥的内容。
(2)已知打点计时器每隔0.02 s打一个点,计算可知两滑块相互作用以前系统的总动量为________ kg·m/s;两滑块相互作用以后系统的总动量为________ kg·m/s(保留三位有效数字)。
(3)试说明(2)中两结果不完全相等的主要原因是___________________________。
解析:(1)实验时应先接通打点计时器的电源,再放开滑块1。
(2)相互作用前滑块1的速度v1= m/s=2 m/s,
系统的总动量为0.310 kg×2 m/s=0.620 kg·m/s,
两滑块相互作用后具有相同的速度v= m/s=1.2 m/s,
系统的总动量为(0.310 kg+0.205 kg)×1.2 m/s=0.618 kg·m/s。
(3)存在误差的主要原因是纸带与打点计时器限位孔间有摩擦。
答案:(1)接通打点计时器的电源 放开滑块1
(2)0.620 0.618 (3)纸带与打点计时器的限位孔间有摩擦
三、计算题
11.如图甲所示,一根直杆AB与水平面成某一角度固定,在杆上套一个小物块,杆底端B处有一弹性挡板,杆与板面垂直,现将物块拉到A点由静止释放,物块下滑与挡板第一次碰撞前后的v t图像如图乙所示,物块最终停止在B点。重力加速度为g=10 m/s2,求:
(1)物块与杆之间的动摩擦因数μ;
(2)物块滑过的总路程s。
解析:(1)由题图可知物块下滑时加速度大小a1=4 m/s2,上滑时加速度大小a2=8 m/s2,杆AB长l=2 m;
设杆倾角为θ,物块的质量为m,物块与杆之间的动摩擦因数为μ,由牛顿第二定律得:
mgsin θ-μmgcos θ=ma1,
mgsin θ+μmgcos θ=ma2,
代入数据,得:μ=0.25,sin θ=0.6,cos θ=0.8。
(2)对物块整个运动分析,设物块总路程大小为s,由动能定理得:
mglsin θ-μmgscos θ=0,
解之得:s=6 m。
答案:(1)0.25 (2)6 m
12.如图,A、B质量分别为m1=1 kg,m2=2 kg,置于小车C上,小车的质量为m3=1 kg,A、B与小车的动摩擦因数为0.5,小车静止在光滑的水平面上。某时刻炸药爆炸,若A、B间炸药爆炸的能量有12 J转化为A、B的机械能,其余能量转化为内能。A、B始终在小车表面水平运动,小车足够长,求:
(1)炸开后A、B获得的速度各是多少?
(2)A、B在小车上滑行的时间各是多少?
解析:(1)根据爆炸过程中能量的转化,
有:E=m1v12+m2v22
爆炸过程中,根据动量守恒得:m1v1=m2v2
联立解得:v1=4 m/s,v2=2 m/s。
(2)爆炸后A、B都在C上滑动,由题意可知B会与C先相对静止,设此时A的速度为v3,B、C的速度为v4,在该过程中,ABC组成的系统动量守恒。设该过程的时间为t1。
对A应用动量定理:-μm1gt1=m1v3-m1v1;
对B应用动量定理:-μm2gt1=m2v4-m2v2;
对C应用动量定理:(μm2g-μm1g)t1=m3v4;
代入数据解之得:v3=3 m/s,v4=1 m/s,t1=0.2 s。
之后,A在C上滑动直到相对静止,由动量守恒定律可知三者速度都为0。
即:(m1+m2+m3)v=0,
解得v=0。
设A滑动的总时间为t,则:-μm1gt=0-m1v1,
解得:t=0.8 s。
答案:(1)4 m/s 2 m/s (2)0.8 s 0.2 s