

- 2.38 MB
- 2021-05-10 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
机械制图及公差
品质部
第一章、图纸的认识
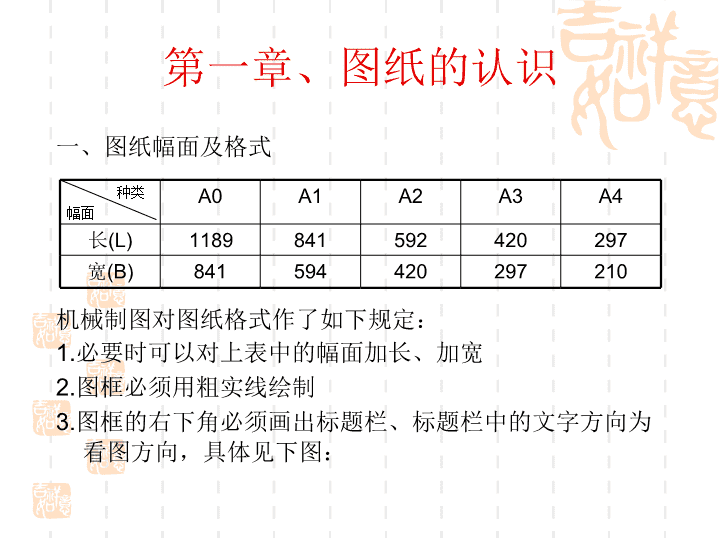
一、图纸幅面及格式
机械制图对图纸格式作了如下规定:
1.
必要时可以对上表中的幅面加长、加宽
2.
图框必须用粗实线绘制
3.
图框的右下角必须画出标题栏、标题栏中的文字方向为看图方向,具体见下图:
种类
幅面
A0
A1
A2
A3
A4
长
(L)
1189
841
592
420
297
宽
(B)
841
594
420
297
210
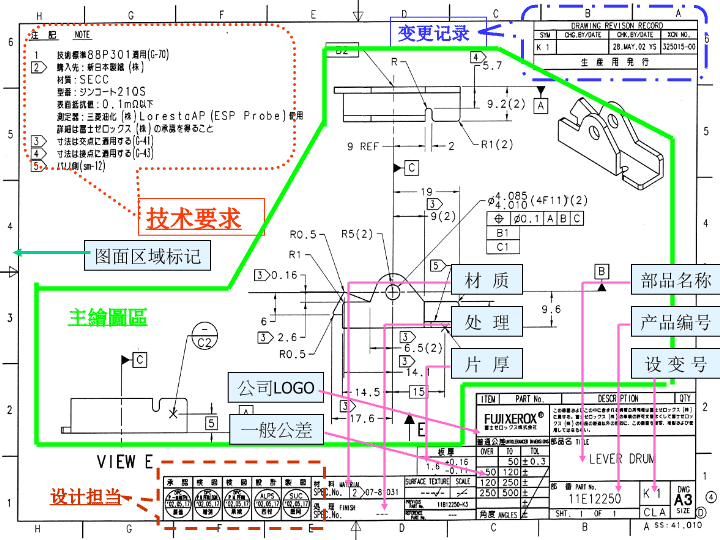
第一章、图纸的认识
技术要求
设计担当
变更记录
主繪圖區
产品编号
设 变 号
部品名称
处 理
片 厚
材 质
图面区域标记
公司
LOGO
一般公差
第一章、图纸的认识
二、比例
在绘图时,我们会根据部品的实际大小选取一定的比例进行绘图,绘图比例有放大比例(如
2:1
)和缩小比例(如
2:1
)及
1:1
比例(一般优先选用
1:1
比例)
三、字体
在机械制图中全部采用长仿宋字体进行书写
四、图线
机械制图中规定了十五种基本线性,下图为常用的图线使用说明:
第一章、图纸的认识
线型
图线的形式
应用范围
粗实线
可见轮廓线
细实线
尺寸线、尺寸界线、剖面线、引出线等
虚线
不可见轮廓线
点画线
轴线、对称中心线、轨迹线等
双点画线
极限位置的轮廓线、假想的轮廓线等
波浪线
零件的断裂线、视图部分与局部图的分界线等
第二章、投影的基本知识
1.
平行投影法
投影体
A
C
B
投影面
a
b
c
正投影
正投影法
投射线垂直于投影面
投影体
A
C
B
投影面
a
b
c
斜投影
投射线倾斜于投影面
斜投影法
第二章、投影的基本知识
在机械制图中所使用的投影方法为正投影法这是因为正投影法有如下特性:
1.
真实性:当直线或平面平行于投影面时,直线的
投影便反映真实长度,平面的投影便能
反映真实的形状
2.
积聚性:当直线或平面垂直于投影面时,直线的
投影就为一个点,平面的投影为一条线
第二章、投影的基本知识
2.
三面投影体系
一般只用一个方向的投影来表达形体是不确定的,通常须将形体向几个方向投影,才能完整清晰地表达出形体的形状和结构。
第二章、投影的基本知识
3.
三面投影体系及三视图的形成
第二章、投影的基本知识
4.
六个投影面的展开
主视图
俯视图
后视图
左视图
仰视图
右视图
第二章、投影的基本知识
5.
基本视图的投影关系
三视图:主视图、俯视图、左视图
基础上增加
:
右视图
、
仰视图、后视图
宽
投影关系:
遵守“长对正,高平齐,宽相等”
第二章、投影的基本知识
6.
第三角投影法简介
国家标准
GB/T 14692-1993
中规定,我国的机械图样“应按第一角画法布置六个基本视图,
……
必要时(如按合同规定)才允许使用第三角画法”。因此,除按合同规定外我国均采用第一角画法。但在国际间的技术交流中,常常会遇到第三角画法。
第三角画法是将机件置于第
Ⅲ
角内,使投影面处于观察者与机件之间而得到正投影的方法,这种画法是把投影面假想成透明的来处理。顶视图是从机件上方往下看所得的视图,画在机件上方的投影面(水平面)上。前视图是从机件的前方往后看所得的视图,画在机件前方的投影面(正平面)上,其余类推。
第二章、投影的基本知识
第二章、投影的基本知识
第一角画法视图配置
第三角画法视图配置
第二章、投影的基本知识
ISO
国际标准中规定,应在标题栏附近画出所采用
画法的识别符号。
第一角画法的识别符号
第三角画法的识别符号
第二章、投影的基本知识
6.
局部视图
将机件的某一部分(即局部)向基本投影面投射所得的视图称为
局部视图
画法及标注:
用带字母的箭头指明要表达的部位和投影方向,并标注视图名称
“
X
”
。
1
、
局部视图的范围用波浪线来表示。当表达的局部结构是完整的且外轮廓封闭时,波浪线可省略。
2
、
局部视图可按基本视图的配置形式配置,也可按向视图的配置形式配置。
3
、
第二章、投影的基本知识
7.
斜视图
问题:
对于
机件上的倾斜部分由于不平行基本投影面,那么该部分在基本投影面的投影不反映实形
。
解决办法:
(
1
)增加一个与倾斜表面平行的辅助投影面。
(
2
)将倾斜部分向辅助投影面投射。
斜视图
是
机件
向不平行于基本投影面的平面投影所得的视图
第二章、投影的基本知识
综 合 举 例
第二章、投影的基本知识
8.
剖 视 图
在用视图表达机件时,其内部结构都用虚线来表示,内部结构形状越复杂,视图中就会出现许多虚线,这样会影响图面清晰,不便于看图和标注尺寸。
A
A
A-A
为了减少视图中的虚线,使图面清晰,可以采用剖视的方法来表达机件的内部结构和形状。
第二章、投影的基本知识
9.
局部放大图
将机件的部分结构,用大于原图形所采用的比例画出的图形称为
局部放大图
。它用于机件上较小结构的表达和尺寸标注。
可以画成视图、剖视、断面等形式,与被放大部位的表达形式无关。图形所用的放大比例应根据结构需要而定,与原图比例无关,
如图
在局部放大图的上方用分数形式标注,如图
A
A
A-A
2:1
Ⅰ
Ⅰ
4:1
Ⅱ
Ⅱ
被放大部位用细实线圈出,用指引线依次注上罗马数字
第二章、投影的基本知识
10.
较长机件的简化画法
实长
较长零件的简化画法
实长
标注尺寸时,仍注实长。
第三章、公差与配合
一、公差配合的基本概念
1.
尺寸公差:为了保证零件的互换性,就必须对零件的尺寸规定一个允许的变动范围,这个允许的变动范围的大小就称为尺寸公差
2.
基本尺寸:设计给定的尺寸
3.
实际尺寸:通过测量所得到的尺寸
4.
极限尺寸:允许尺寸变化的两个界线值,他以基本尺寸为基数来确定
5.
最大极限尺寸:两个极限尺寸中较大的一个尺寸
6.
最小极限尺寸:两个极限尺寸中较小的一个尺寸
7.
尺寸偏差:某一尺寸减基本尺寸所得的代数差
8.
上偏差:最大极限尺寸减去基本尺寸所得到的代数差
9.
下偏差:最小极限尺寸减去基本尺寸所得到的代数差
第三章、公差与配合
举例说明:
1.
Φ
10
+0.05
-0.02
此尺寸的基本尺寸是
Φ
10
,上偏差为
+0.05
,下偏差为
-0.02
,尺寸公差为
0.07
,最大极限尺寸为
Φ
10.05
,最小极限尺寸为
Φ
9.98
,实际尺寸必须在
Φ
9.98
~
Φ
10.05
之间为
OK
2.
16
±
0.1
此尺寸的基本尺寸是
16
,上偏差为
+0.1
,下偏差为
-0.1
,尺寸公差为
0.2
,最大极限尺寸为
16.10
,最小极限尺寸为
15.90
,此尺寸为对称偏差。
3.
25
0
-0.5
此尺寸的基本尺寸是
25
,上偏差为
0
,下偏差为
-0.5
,尺寸公差为
0.5
,最大极限尺寸为
25.0
,最小极限尺寸为
24.5.
分 類
名 稱
符 號
分 類
名 稱
符 號
形
狀
公
差
直 線 度
位
置
公
差
定
向
平等度
垂直度
平 面 度
傾斜度
圓 度
定
位
同軸度
圓 柱 度
對稱度
線輪廓度
位置度
跳
動
圓跳動
面輪廓度
全跳動
2.
形 位 公 差
第三章、公差与配合
A
B
Φ0.05
形位公差代號
基 准 代 號
A
第三章、公差与配合
三、符号含义
Φ
、
C
、
R
、
S
Φ
、
SR
、
MIN
、
MAX
、
Rz
、
Ra
、
M5
×
0.8-6g
、
6s
含义