

- 49.00 KB
- 2021-05-10 发布
- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
2018年石家庄信息技术中考知识点总结
一、信息技术
1.信息就是消息,它是多种多样的,可以用文字、符号、图像、声音、语言等载体呈现。
2.信息技术是指一切与信息的收集、存储、传递、处理和应用等有关的各种技术和手段。
3.现代信息技术:主要包括感测技术、通信技术和计算机技术。
4.多媒体通常指信息载体,如文字、图形、图像、动画、音频、视频等。5.IT:是指信息技术。
二、计算机发展史
⒈1946年,世界第一台计算机ENIAC诞生。
⒉四代计算机:电子管、晶体管、集成电路、大规模超大规模集成电路。
⒊个人计算机简称:PC机
⒋冯·诺依曼计算机体系结构:计算机硬件包括五部分、采用二进制存储数据、使用存储程序的工作原理。
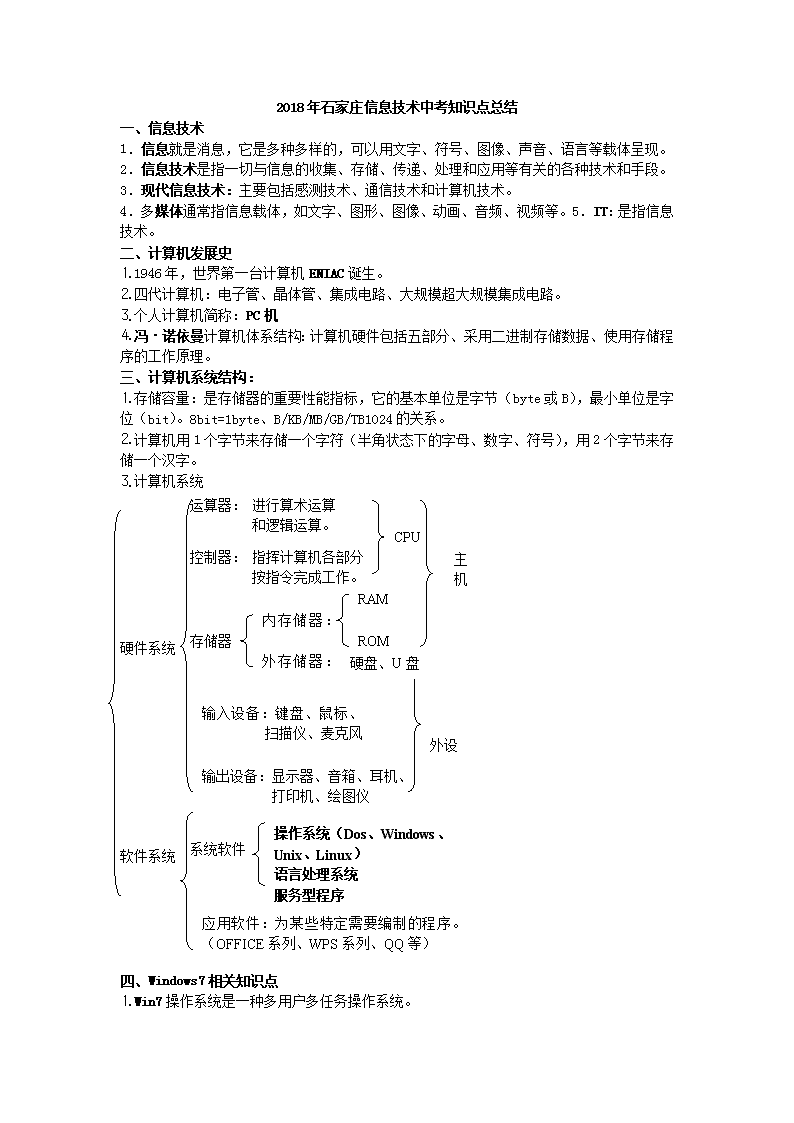
三、计算机系统结构:
⒈存储容量:是存储器的重要性能指标,它的基本单位是字节(byte或B),最小单位是字位(bit)。8bit=1byte、B/KB/MB/GB/TB1024的关系。
⒉计算机用1个字节来存储一个字符(半角状态下的字母、数字、符号),用2个字节来存储一个汉字。
进行算术运算
和逻辑运算。
运算器:
⒊计算机系统
CPU
主机
指挥计算机各部分
按指令完成工作。
控制器:
RAM
内存储器:RA
ROM
存储器
硬盘、U盘
外存储器:RA
硬件系统
输入设备:键盘、鼠标、扫描仪、麦克风
外设
输出设备:显示器、音箱、耳机、
打印机、绘图仪
操作系统(Dos、Windows、Unix、Linux)
语言处理系统
服务型程序
系统软件
软件系统
应用软件:为某些特定需要编制的程序。(OFFICE系列、WPS系列、QQ等)
四、Windows7相关知识点
⒈Win7操作系统是一种多用户多任务操作系统。
⒉文件名结构:主文件名.扩展名,例:abc.txt 文件名中不能包含的字符有:、/、:、?、<、>、*、”、|
⒊常见的文件扩展名:位图→bmp、文本→txt、word→doc、powerpoint→ppt、excel→xls、frontpage→htm/html、flash源文件→fla、flash影片→swf、视频文件→avi或mpg或rm、音频文→mid或wav或mp3、图像文件→bmp或gif或jpg或wmf
⒋位图:也叫做点阵图、像素图,就是由像素构成的图,缩放会失真,可以表现丰富的颜色层次。例如:bmp。位图不能取消组合。GIF颜色最少。矢量图:也叫做向量图,是用数学方法描述的图,变形或缩放不影响图形显示质量(放大后边缘不粗糙),例如:剪贴画(wmf)。剪贴画不能自由旋转。
⒌常用的快捷键有:复制ctrl+c、剪切ctrl+x、粘贴ctrl+v、中英文输入法切换ctrl+space、各种输入法切换ctrl+shift、结束任务Crl+Alt+Del
6.剪切板:是位于内存的一个存储区域,存放“剪切”“复制”的内容。
7.一般情况下从U盘删除的东西不进入回收站。
五、病毒
⒈计算机病毒:以危害系统为目的的一段特殊的计算机程序。
⒉特点:隐蔽性、潜伏性、破坏性、传染性、可触发性
⒊杀毒软件通常滞后于新计算机病毒的出现,比较彻底的消除方法是格式化磁盘。
⒋计算机病毒破坏的对象:软件、硬件、数据。防止软盘/U盘感染病毒的方法是加写保护。
六、IP地址与域名地址
⒈IP地址:是接入网络的节点计算机的地址,例10.3.128.130。
IP地址正确性的判断:a、由四组数字组成(错:192.168.0)b、每组数字由圆点“.”隔开(错:192,168,0,1)c、每组数字在0~255之间(错:192.256.0.1)
⒉域名地址:计算机名.组织机构名.网络名.最高层域名,例:netra.tsinghua.edu.cn
网络名有:教育edu、政府gov、商业com、国际组织int、军队mil、非赢利组织org、网络中心net
最高层域名有:中国cn、日本jp、美国us
⒊IP地址与域名地址一一对应,是唯一。
七、常见的英文缩写的含义
⒈CAI计算机辅助教学 CAD计算机辅助设计 CAM计算机辅助制造 CAE计算机辅助工程 CAT计算机辅助测试
⒉HTTP超文本传输协议 ⒊URL统一资源定位器
⒋HTML超文本标识语言
⒌TCP/IP:TCP是传输控制协议,IP是网络互联协议
八、计算机网络
⒈计算机网络按地理范围划分为:局域网(LAN)和广域网(WAN).。
⒉因特网提供信息服务:WWW万维网、E-mail电子邮件、FTP文件传输、Telnet远程登录、Usenet专题讨论、Gopher信息查询服务、Wais广域信息查询服务、BBS电子公告牌。
⒊电子邮箱地址格式:用户名@域名或主机的IP地址:发送邮件必须填写收件人地址,如果要发送文件应以附件形式发送,其余内容可空。
⒋计算机网络的主要功能:①数据通信②资源共享(可分为硬件共享、软件共享、数据共享)③分布式处理
九、office
1. WORD:设置首行缩进2字符,一次未设置成功,多次缩进不得分,若时间允许,需要重做本题。
1. 操作题注意不要更改原文件内容,若有误操作要及时撤消。不要更改图片位置。
2. Ppt中的文字格式设置都是针对的文本框操作。
2018微机中考题型
1.选择题10道(2*10=20分)
内容包含:计算机基础、机器人相关知识
2.基础多媒体(10分)
格式工厂2.15版
3.Word (20分)
4.PPT (20分)
5.Excel (20分)
6.Flash (10分)
考试大纲
(一)选择题
考试范围为课本基础知识、机器人知识及相关常识等,原则上不涉及Office和Flash章节。
(二)基础多媒体题
1.Windows:文件(夹)的新建、重命名、移动、复制、删除、创建快捷方式。
2.WinRAR:文件(夹)的压缩,压缩包的解压缩。
3.多媒体题
● 图片文件转换格式、修改大小。
● 音频文件转换格式、截取一段音频、合并音频文件、MP3文件设置属性。
● 视频文件转换格式、截取一段视频、合并视频文件、视频文件提取声音。
(三)Word操作题
● 文字格式设置(包括表格内的文字):字体、字号、颜色、加粗、倾斜、下划线、文字底纹、字符间距、文字效果。
● 段落格式设置:对齐方式、左右缩进、首行缩进、悬挂缩进、段前段后间距、行距。
● 图片类对象(包括艺术字、图片、文本框):插入、设置、超链接。
● 表格格式设置:插入行/列,删除行/列,单元格对齐方式,设置内外边框的颜色、粗细,单元格的填充颜色。
● 其它操作:页面设置(上下左右边距、纸张大小和使用方向)、替换(只替换文本),分栏,页眉和页脚(插入并设置格式)。
(四)PowerPoint操作题
● 幻灯片的操作:添加、删除、隐藏幻灯片,交换幻灯片位置,幻灯片版式,背景(渐变——预设),幻灯片切换(切换效果,速度、声音、换页方式,应用范围)。
● 其他对象的操作:
文本框、图片、艺术字、自选图形(包括动作按钮)。
上述对象的插入,相关设置,自定义动画(动画效果,开始、方向、速度,声音),超级链接(相对位置与绝对位置)。
(五)Excel操作题
● 单元格格式设置:字体(字体、字号、加粗、倾斜、文字颜色),填充,边框(更改颜色),对齐(合并及居中、水平居中、跨列居中、垂直居中)。
● 公式(能够按照所给公式,写出相应Excel公式)
函数(求和、平均值、最大值、最小值)
● 图表:连续和不连续数据源,图表标题、分类轴和数值轴标题、保存在当前工作表。
● 其他操作:指定单元格输入,指定行/列的行高、列宽,工作表重命名,序列填充(等差数列填充,文本序列填充)。
(六)Flash操作题
● 舞台:属性(高、宽、背景色),导入(图片、声音)。
● 图层:插入、删除,重命名,更改位置,锁定/解锁,属性(引导层、被引导层、遮罩层、被遮罩层)。
● 帧:插入空白关键帧、关键帧、普通帧,复制、粘贴帧。
● 元件:新建元件(图形、影片剪辑),转换为元件。
实例(包括图形)对象:绘制、大小、移动位置、旋转角度、颜色(纯色和过渡色、Alpha值)。(包括:文字对象的输入、修改字体、字号和字色)
● 动画:运动动画,形状动画,引导线动画,遮罩层动画。
附件1:机器人相关知识概述
(1)机器人的定义:机器人(robot)是自动执行工作的机器装备。它既可以接受人类的指挥,又可以运行预先编排好的程序,也可以根据以人工智能技术制定的原则纲领行动。
1959年美国的英格伯格和德沃尔设计制造出世界上第一台工业机器人,被称为"尤尼梅特“。
(2)机器人的分类:
从应用环境出发,将机器人分为两类:工业机器人和特种机器人。
工业机器人就是面向工业领域的多关节机械手或多自由度机器人。
特种机器人则是除工业机器人以外的,用于非制造业并服务于人类的各种先进机器人,包括:服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人、机器人化机器等......
(3)机器人的组成:
机器人主要由传感器、控制器、执行器三部分组成。
机器人感受信息是通过各种不同类型的传感器(输入设备)来收集外部的信息,然后把信息传递给机器人的大脑——MCU,再通过它的执行器(输出设备)将动作和行为表现出来。
机器人与电脑的对比:
电脑
机器人
中央处理器
CPU
MCU
存储器
内存
集成于MCU
外部存储器
输入设备
硬盘
键盘,鼠标
程序存储空间
多种传感器
输出设备
显示器,音响,打印机
行动系统,声音、显示器件
工作频率
高
低
开发程序
各种高级语言
C语言,汇编语言和类流程图控制
(4)机器人的发展方向:
智能化是机器人的发展方向,智能机器人是具备一些与人或生物相似的智能能力,如感知能力,动作能力、规划能力和协同能力等,是“能自动工作的机器“。
智能机器人将是具有感知、思维和行动功能的机器。今后将融合机构学、自动控制、人工智能、微电子学、光学、通讯技术、传感技术、仿生学等多学科和技术的综合研究制造出不同功能的智能机器人。
组装机器人
(1)制作一个教学机器人需要搭建它的物理框架、行动机构、逻辑控制机构,传感器、能源系统等多个方面。实验需要经历器材准备,模型搭建,电路连接,程序指令的编写,下载,检验等过程。把程序传输到电子产品的过程叫做下载。
(2)两驱三轮车和两驱四轮车都是有两个驱动轮组成,不同的是一个是万向轮,另一个是从动轮。四驱四轮车的四轮都是由四个驱动轮组成,可以提供更强的动力和抓地力,广泛的被应用到越野汽车上;四个电机协同工作,如果速度不匹配将会造成失控、翻车等严重问题。
程序控制机器人
(1)流程图
流程图是表示程序算法的一种方法。我们可以用程序控制机器人的动作,完成任务。
流程图定义:表示工作过程中事物各个环节进行顺序的简图。
流程图结构一般分为三种:顺序结构,分支结构(又称选择结构),循环结构。
(2)传感器
传感器
常见的有:接触传感器,红外传感器,温度传感器,磁体传感器(霍尔传感器),压力传感器,光敏传感器,火焰传感器等,可根据不同的条件触发传感器,控制电路状态,反馈信息。
接触传感器(碰撞传感器为例)的工作状态:
开关状态
电路状态
反馈信息
代表的数字
程序逻辑
实际情况
压下
电路导通
有信号
0
真
遇到障碍
弹起
电路截止
没信号
1
假
没遇障碍
红外传感器工作原理是利用红外光反射的原理实现的。首先每个红外线传感器上都有一个红外光发射管和一个红外光接收管,当红外光在发射过程中遇到浅色的物体后就会出现反射现象,光电管就是利用识别反射光的强度来判断出前面是否有障碍物的。如果前方没有物体或者是黑色物体,红外光将没有反射光线或反射光线极弱,不能触发传感器反馈信息,所以传感器认为前方没有障碍物。
温度传感器是能感应温度的传感器。
(3)机器人基本程序设计
各种教学机器人不论是流程图式的模块编程,还是代码编程,设计思路都是一样的。
1、简单程序设计
以两驱车为例,如果两个驱动轮等速前行,则小车直行,如果两轮不等速,小车会向左向右转动。通过设计可以使小车的轨迹走出圆形等形状。
右轮停转
左轮正转
延时
例:【流程图】
传感器判断
小车转动一定角度
小车前进
Y
N
2、智能避障程序设计
【任务】小车在前进过程中,要求避开障碍物后继续前行。
【搭建】改装小车,在车头安装碰撞传感器,方向向前。
(该实验也可用红外传感器判断障碍物)
【流程图】
3、智能循迹程序设计(巡黑线)
【任务】在一块白色的平面上有一条弯曲的黑色轨道,要求小车能沿轨道前进,行驶过程中不停的纠正前进的方向。
【搭建】改装小车,在车头两侧装上2个反射型红外传感器,方向向下。
(2个传感器间距大于轨道宽度)
【流程图】
左传感器判断
左轮正转
右传感器判断
右轮正转
左轮停止
右轮停止
Y
Y
N
N