

- 319.00 KB
- 2021-05-13 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
分类汇编:综合计算题
1.(201潍坊)8如图所示是一种常见的封闭电热水袋,其性能参数如表中所示。已知电热水袋加热效率为80%,水的比热容c=4.2×103J/(kg•℃),水的密度ρ=1.0×103kg/m3.将袋内20℃的水加热到自动断电,求:
(1)袋内水吸收的热量
(2)需要的加热时间
额定电压
额定加热功率
220V
400W
袋内充水
自动断电温度
1.0L
60℃
解:(1)由ρ=可得袋内水的质量:m=ρ水V=1.0×103kg/m3×1.0×103=1kg,
袋内水吸收的热量:
Q=cm(t﹣t0)=4.2×103J/(kg•℃)×1kg×(60℃﹣20℃)=1.68×105J;
(2)由η=可得消耗电能:W===2.1×105J,
由P=可得,需要的加热时间:t===525s。
答:(1)袋内水吸收的热量为1.68×105J;(2)需要的加热时间为525s。
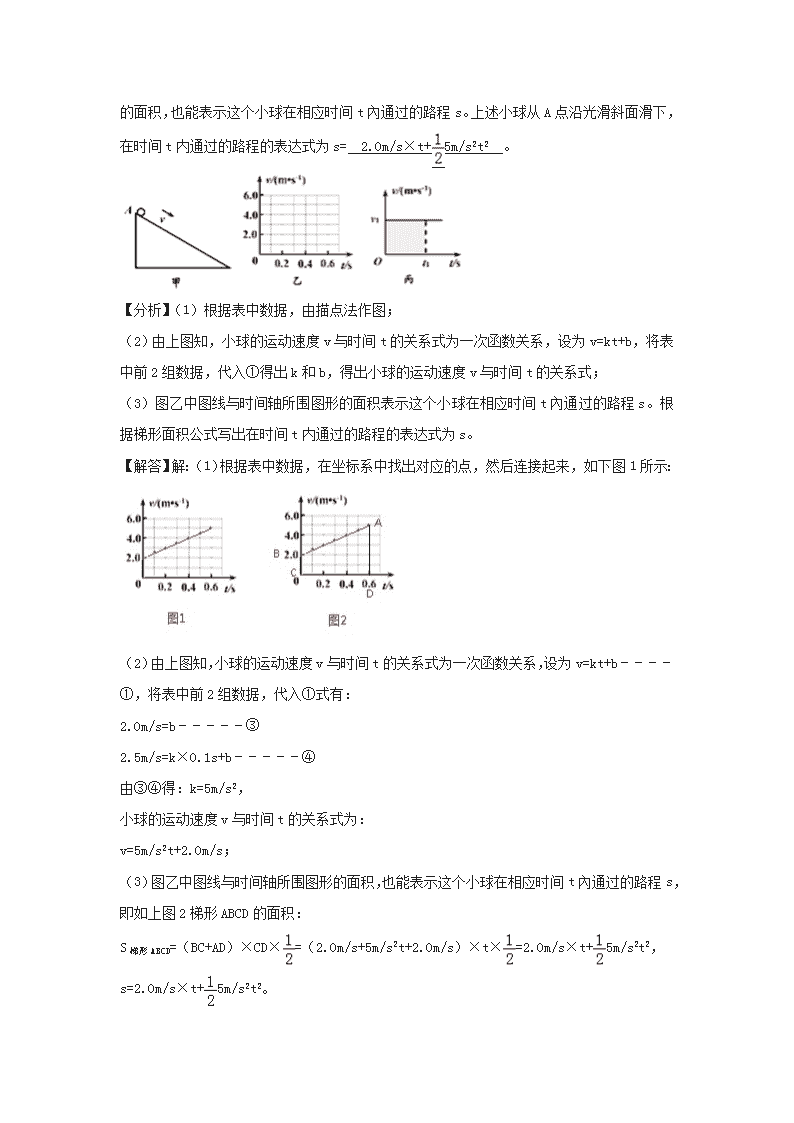
2.(2018•青岛)探究小球在斜面上的运动规律如图甲所示,小球以初速度20m/s从A点沿着足够长的光滑斜面滑下,它在斜面上的速度ν随时间t均匀变化。实验数据如下表
t/s
0
0.1
0.2
0.3
0.4
0.5
0.6
v/(m.s﹣1)
2.0
2.5
3.0
3.5
4.0
4.5
5.0
(1)根据表中数据,在图乙中描点并画出小球的v﹣t图象。
(2)小球的运动速度v与时间t的关系式为v= 5m/s2t+2.0m/s ;
(3)如图丙所示,以速度v1做匀速直线运动的物体在时间t内通过的路程是s1=v1t1
,它可以用图线与时间轴所围矩形(阴影部分)的面积表示。同样,图乙中图线与时间轴所围图形的面积,也能表示这个小球在相应时间t內通过的路程s。上述小球从A点沿光滑斜面滑下,在时间t内通过的路程的表达式为s= 2.0m/s×t+5m/s2t2 。
【分析】(1)根据表中数据,由描点法作图;
(2)由上图知,小球的运动速度v与时间t的关系式为一次函数关系,设为v=kt+b,将表中前2组数据,代入①得出k和b,得出小球的运动速度v与时间t的关系式;
(3)图乙中图线与时间轴所围图形的面积表示这个小球在相应时间t內通过的路程s。根据梯形面积公式写出在时间t内通过的路程的表达式为s。
【解答】解:(1)根据表中数据,在坐标系中找出对应的点,然后连接起来,如下图1所示:
(2)由上图知,小球的运动速度v与时间t的关系式为一次函数关系,设为v=kt+b﹣﹣﹣﹣①,将表中前2组数据,代入①式有:
2.0m/s=b﹣﹣﹣﹣﹣③
2.5m/s=k×0.1s+b﹣﹣﹣﹣﹣④
由③④得:k=5m/s2,
小球的运动速度v与时间t的关系式为:
v=5m/s2t+2.0m/s;
(3)图乙中图线与时间轴所围图形的面积,也能表示这个小球在相应时间t內通过的路程s,即如上图2梯形ABCD的面积:
S梯形ABCD=(BC+AD)×CD×=(2.0m/s+5m/s2t+2.0m/s)×t×=2.0m/s×t+5m/s2t2,
s=2.0m/s×t+5m/s2t2。
故答案为:(1)如图1所示;
(2)5m/s2t+2.0m/s;
(3)2.0m/s×t+5m/s2t2。
3.(临沂)2017年12月24日,我国自主研发的全球最大水陆两栖飞机AG600首飞成功,可为“海上丝绸之路”航行安全提供最快速有效的支援与安全保障。它的最大飞行速度为560km/h,最大航程为4500km,巡航速度(经济、节油的飞行速度)为500km/h。某次起飞前,飞机静止在水平跑道上,总质量为51t,轮胎与跑道的总接触面积为0.6m2(ρ水=1.0×103kg/m3,g=10N/kg)。求:
(1)飞机静止在跑道上时对跑道的压强是多少?
(2)起飞后,飞机在空中直线飞行1400km,所需要的最短时间是多少?
(3)飞机到达目的地降落后,漂浮在水面上,排开水的质量为46t,此时飞机受到的重力是多少?舱底某处距水面1.5m,水对该处产生的压强是多少?
解:(1)飞机静止在跑道上,对跑道的压力为:
F=G=mg=51×103kg×10N/kg=5.1×105N;
则飞机对跑道的压强为:
p===8.5×105Pa;
(2)飞机的最大飞行速度为560km/h,
由v=得,飞机所需的最短时间为:
t===2.5h;
(3)飞机到达目的地降落后,漂浮在水面上,由漂浮条件可得F浮=G飞机,
由阿基米德原理可得,飞机受到的浮力为:F浮=G排,
所以,可得此时飞机的重力为:
G飞机=G排=m排g=46×103kg×10N/kg=4.6×105N;
水对舱底的压强为:
p=ρ水gh=1.0×103kg/m3×10N/kg×1.5m=1.5×104Pa
答:(1)飞机静止在跑道上时对跑道的压强是8.5×105Pa;
(2)起飞后,飞机在空中直线飞行1400km,所需要的最短时间是2.5h;
(3)飞机受到的重力是4.6×105N;水对舱底产生的压强是1.5×104Pa。
4.(2018潍坊)如图所示,用细线将正方体A和物体B相连放入水中,两物体静止后恰好悬浮,此时A上表面到水面的高度差为0.12m。已知A的体积为1.0×10﹣3m3,所受重力为8N;B的体积为0.5×10﹣3m3,水的密度ρ=1.0×103kg/m3,g取10N/kg,求:
(1)A上表面所受水的压强;
(2)B所受重力大小;
(3)细线对B的拉力大小。
解:(1)A上表面所受水的压强:p=ρ水gh=1×103kg/m3×10N/kg×0.12m=1200Pa;
(2)A、B受到的总浮力:
F浮=ρ水gV排=ρ水g(VA+VB)=1×103kg/m3×10N/kg×(1.0×10﹣3m3+0.5×10﹣3m3)=15N;
因为A、B恰好悬浮,所以F浮=GA+GB,则B的重力:GB=F浮﹣GA=15N﹣8N=7N;
(3)B受到的浮力:F浮B=ρ水gV排B=ρ水gVB=1×103kg/m3×10N/kg×0.5×10﹣3m3=5N,
细线对B的拉力:F拉=GB﹣F浮B=7N﹣5N=2N。
答:(1)A上表面所受水的压强为1200Pa;(2)B所受重力大小为7N;
(3)细线对B的拉力大小为2N。
5.(2018长沙)某校科技小组参观完湘江航电枢纽后,了解到船只过船闸的时间很长,为此他们在网查阅资料,设计了一个船只升降实验模型。模型中的左右两个船厢A、B的容积均为2000cm3,质量均为400g(含配件)。现关闭进水阀和排水阀,使柱形容器E(质量不计)中有足够多的水,在船厢A、B中各装800g的水,整个装置静止后,圆柱体浮筒D浸在水中的深度为8cm,他们依次进行了如下(2)~(3)的操作。假设绳子足够长,不计绳重和伸长,浮筒D与容器E始终无接触,且容器E的水无溢出,实验过程中设法确保装置平稳,忽略摩擦,木头不吸水,ρ木<ρ水。(ρ水=1.0×103kg/m3,g取10N/kg)。
(1)船厢中各装800g的水后,求每只船厢所受的总重力;
(2)打开进水阀,在柱形容器E中注入一定质量的水,浮筒D上升,使船厢下降10cm,再关闭进水阀,求:
①船厢A的总重力对A所做的功;
②此时浮筒D浸入水中的深度;
(3)当操作(2)使船厢下降10cm后静止时,压强传感器柱形容器显示4400Pa;接下来,用手使浮筒D保持此刻位置不变,再在两边船厢中同时放入代表船只的800g木块后,打开排水阀,放出200cm3的水后关闭排水阀,然后松手,浮筒D仍然在原位置保持静止,绳C的拉力为18N,压强传感器显4000Pa;然后,把800g木块同时从船厢中取出,并在船厢中同时注满水,再把900g和1000g的木块分别放入A、B船厢后,当整个装置静止时,压强传感器的示数为p1;最后,打开进水阀向容器中缓慢注入m千克水,使压强传感器的示数为3p1,再关闭进水阀。求浮筒D的质量和注入圆柱形容器E中的水的质量m。
考点:滑轮、重力、浮力
专题:机械运动和力、机械能
解析:(1)重力G=mg=(0.4kg+0.8kg)×10N/kg=12N ;
(2)①W=Fs=Gh=12N×0.1m=1.2J;
②h浸=8cm;
由FC+G动=G厢,可得G动=G厢—FC=20N-18N=2N,
由Δp=ρ液gΔh=400Pa,
由
12N—G动=GD—F浮
20N—G动=GD—F浮ˊ
解得ΔF浮=8N,
;
F浮=ρ水gh浸Δh=1.0×103kg/m3×10N/kg×0.08m×0.02m2=16N ,
F浮ˊ=16N—8N=8N,GD=10N+16N=26N,mD=2.6kg;
由ΔV=(SE—SD)Δh,;
由4000Pa×SE=G水+F浮ˊ,
G水=4000Pa×250×10-4cm2—8N=92N,
注满水,20N+4N—2N=GD—F浮ˊ,F浮ˊ=4N,
由于
P1SE=G水+F浮ˊ=92N+4N=96N,
3P1SE=G水+ΔG注+F浮ˊ
。
故答案为:(1)12N;(2)①1.2J;②8cm。(3)19.2kg。
6.(2018河北)实心圆柱体甲和长方体乙分别放置在水平地面上,甲的密度为0.6×104 kg/m3,质量为12 kg,底面积为4×10−2 m2;乙的质量为5.4 kg,边长分别为0.1 m、0.2 m 0.3 m。(g取10 N/kg)
(1) 求乙的密度_____。
(2) 求甲直立时对水平地面的压强_____。
(3)若在甲的上方水平截去一段并叠放在乙的正上方后,甲剩余圆柱体对水平面的压强恰好等于此时乙对水平地面压强的最小值,求甲截去的高度_____。
【答案】 (1). (2). 3000pa (3). 0.21 m
【解析】分析:(1)知道长方体乙的边长可求其体积,又知道其质量,根据求出乙的密度;
(2)甲直立时对水平地面的压力和自身的重力相等,根据求出对水平地面的压强;
(3)设出甲截取的高度,根据表示出截取部分的质量,甲剩余部分对水平面的压力等于剩余部分的重力,根据表示出其大小;甲截取部分叠放在乙的正上方后,对水面的压力等于两者重力之和,乙与水面地面的接触面积即受力面积最大时对水平地面的压强最小,根据表示出其大小,利用两者压强相等得出截取部分的质量,进一步求出截取部分的高度。
解答:(1)长方体乙的体积:,乙的密度:;
(2)甲直立时对水平地面的压力:,对水平地面的压强:;
(3)设甲在上方水平截取的高度为h,则截取部分的质量:
,甲剩余部分对水平地面的压强:,甲截取部分叠放在乙的正上方后,要使乙对水平面的压强最小,则乙的受力面积(乙的底面积)应最大,此时乙的受力面积:,此时乙对水平地面的最小压强:,由题意可知,,则有:,即,解得:m=5.04kg,由可得甲截去的高度为:。
答:(1)乙的密度为0.9×103kg/m3;
(2)甲直立时对水平地面的压强为3×103Pa;
(3)甲截去的高度为0.21m。
7.(2018重庆)为探究平衡木受力特点,喜爱体操的小微设计了一个平衡木模型。整个装置如图甲所示
AB可绕支点O无摩擦转动,C处固定一竖直硬杆,硬杆的底部安装了压敏电阻片R,R所在的电路放在了硬杆内(整个装置除硬杆以外,其它部分的重力均不计),且AB=5m,OA=BC=1m,电源电压恒为3V,硬杆底部R阻值随地面对它的支持力F受化的关系如图乙所示,整个装置放在水平地面上,AB始终处于水平平衡状态,当重360N的小薇站在A点时,电流表的示数为0.1A,求:
(1)小薇在A点时,C处受到硬杆的拉力;
(2)小薇在A点时,地面对硬杆底部R的支持力;
(3)当电流表的示数为0.3A时,小薇距A点多少米?
【答案】见解析所示
【解析】解根据杠杆的平衡条件可得GA所以F==120N,
(2) 小薇站在A点时,电流表的示数为0.1A,此时电路中的电阻R==30,由乙图可知F支=60N;(3)G杆=F支+F=120N+60N=180N,当=0.3A时,=10,由乙图知=300N,则杆受到C端的压力F压=-G杆=300N-180N=120N,杆对C端的支持力FC=F压=120N(人在O点的左边)根据杠杆的平衡条件得GAl=FC 所以l==1m,小薇距A点l+OA=1m+0.5m=1.5m
(9分)如图所示,水平地面上有一个扫地机器人,它通过安装在身体底部的三个轮子与地面接触,清扫中利用软毛刷和吸气孔收集灰尘,遇到障碍物能够自动改变方向继续行进,某次机器人开始扫地1min后遇到障碍原地旋转20s,然后继续扫地2min,总行驶路程为36m。已知机器人质量为3.8kg,圆形身体半径为0.2m,三个轮子与地面接触的总有效面积为2×10﹣4m2,行进中受地面的摩擦阻力大小恒为10N,忽略灰尘质量、毛刷支撑以及气流的影响,取g=10N/kg。求:
(1)机器人清扫工作中对地面的压强;
(2)机器人在本次清扫工作中的平均速度
(3)若机器人某段时间以0.5m/s的速度做匀速直线运动,计算机器人该段时间内牵引力的功率
解:
(1)机器人对水平地面的压力为:
F=G=mg=3.8kg×10N/kg=38N;
机器人对地面的压强为:;
(2)机器人总行驶路程S=36m,
所用总时间为:t=1×60s+20s+2×60s=200s,
则机器人在本次清扫工作中的平均速度:
;
(3)因为机器人做匀速直线运动,
所以牵引力与阻力平衡,则F牵=f=10N;
由P===Fv可得,机器人牵引力的功率为:
P=F牵v=10N×0.5m/s=5W。
答:(1)机器人清扫工作中对地面的压强为1.9×105Pa;
(2)机器人在本次清扫工作中的平均速度为0.18m/s;
(3)机器人牵引力的功率为5W。