

- 2.09 MB
- 2021-06-16 发布

- 1、本文档由用户上传,淘文库整理发布,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,请立即联系网站客服。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细阅读内容确认后进行付费下载。
- 网站客服QQ:403074932
直线和圆的极坐标方程、曲线的极坐标方程与直角坐标方程的互化、
圆锥曲线统一的极坐标方程
练习
1 极坐标方程 πcos 4
表示的曲线是( ).
A.双曲线 B.椭圆
C.抛物线 D.圆
2 过 A π2, 4
且平行于极轴的直线的极坐标方程是( ).
A.ρsin θ= 2 B.ρsin θ=2
C.ρcos θ= 2 D.ρcos θ=2
3 化极坐标方程ρ2cos θ-ρ=0 为直角坐标方程为( ).
A.x2+y2=0 或 y=1 B.x=1
C.x2+y2=0 或 x=1 D.y=1
4 圆心在点(-1,1)处,且过原点的圆的极坐标方程是( ).
A.ρ=2(sin θ-cos θ) B.ρ=2(cos θ-sin θ)
C.ρ=2sin θ D.ρ=2cos θ
5 过极点 O 作圆 C:ρ=8cos θ的弦 ON,则 ON 的中点 M 的轨迹方程是__________.
6 已知双曲线的极坐标方程为 3
1 2cos
,过极点作直线与它交于 A,B 两点,且|AB|
=6,求直线 AB 的极坐标方程.
7 已知在△ABC 中,AB=6,AC=4,当∠A 变化时,求∠A 的平分线与 BC 的中垂线的交
点 P 的轨迹方程.
参考答案
1 答案:D π π π 2 2cos cos cos sin sin cos sin4 4 4 2 2
= + + ,∴ρ2
= 2
2
ρcos θ+ 2
2
ρsin θ,即 x2+y2= 2 2
2 2x y .
化简整理,得
2 2
2 2 1=4 4 4x y
,表示圆.
2 答案:A 如图所示,设 M(ρ,θ)(ρ≥0)是直线上任意一点,过 M 作 MH⊥x 轴于 H,
∵A π2, 4
,
∴|MH|= π2sin = 24
.
在 Rt△OMH 中,|MH|=|OM|sin θ,即ρsin θ= 2 ,
∴过 A π2, 4
且平行于极轴的直线方程为ρsin θ= 2 .
3 答案:C ρ2cos θ-ρ=0⇒ρ(ρcos θ-1)=0,
得ρ=0 或ρcos θ-1=0,即 x2+y2=0 或 x=1.
4 答案:A 如图所示,圆的半径为 2 21 1 = 2 ,
∴圆的直角坐标方程为(x+1)2+(y-1)2=2,
即 x2+y2=-2(x-y),化为极坐标方程,得ρ2=-2(ρcos θ-ρsin θ),即ρ=2(sin
θ-cos θ).
5 答案:ρ=4cos θ 方法一:如图,圆 C 的圆心为 C(4,0),半径为|OC|=4,连接
CM.
∵M 为弦 ON 的中点,
∴CM⊥ON,故 M 在以 OC 为直径的圆上.
∴点 M 的轨迹方程是ρ=4cos θ.
方法二:设 M 点的坐标是(ρ,θ),N(ρ1,θ1).
∵N 点在圆ρ=8cos θ上,∴ρ1=8cos θ1,①
∵M 是 ON 的中点,∴ 1
1
2 ,
.
将它代入①式得 2ρ=8cos θ,故点 M 的轨迹方程是ρ=4cos θ.
6 答案:解:设直线 AB 的极坐标方程为θ=θ1,A(ρ1,θ1),B(ρ2,θ1+π).则
1
1
3=1 2cos
,
2
1 1
3 3= =1 2cos π 1 2cos
.
|AB|=|ρ1+ρ2|=
1 1
3 3
1 2cos 1 2cos
2
1
6= 1 4cos
=6,
∴ 2
1
1
1 4cos
=±1.∴cos θ1=0 或 cos θ1= 2
2
.
故直线 AB 的极坐标方程为 π= 2
或 π= 4
或 3π= 4
.
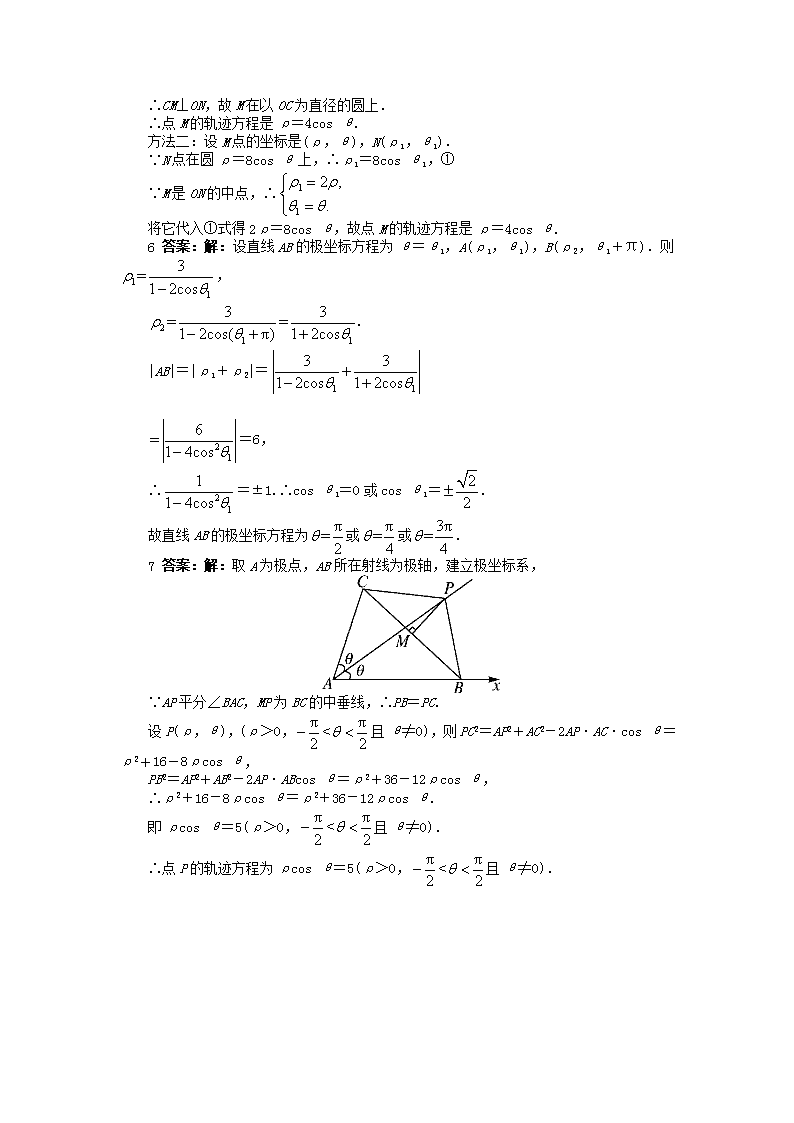
7 答案:解:取 A 为极点,AB 所在射线为极轴,建立极坐标系,
∵AP 平分∠BAC,MP 为 BC 的中垂线,∴PB=PC.
设 P(ρ,θ),(ρ>0, π π<2 2
且θ≠0),则 PC2=AP2+AC2-2AP·AC·cos θ=
ρ2+16-8ρcos θ,
PB2=AP2+AB2-2AP·ABcos θ=ρ2+36-12ρcos θ,
∴ρ2+16-8ρcos θ=ρ2+36-12ρcos θ.
即ρcos θ=5(ρ>0, π π<2 2
且θ≠0).
∴点 P 的轨迹方程为ρcos θ=5(ρ>0, π π<2 2
且θ≠0).
相关文档
- 高中数学第1章集合章末综合测评含2021-06-166页
- 2020_2021学年新教材高中数学第7章2021-06-167页
- 高中数学(人教版必修5)配套练习:1-1正2021-06-166页
- 人教版高中数学选修4-5练习:第三讲32021-06-166页
- 高中数学人教a版选修2-3章末综合测2021-06-1611页
- 高中数学人教版选修1-2课时提升作2021-06-168页
- 2020_2021学年新教材高中数学第3章2021-06-1611页
- 高中数学人教a版选修1-1学业分层测2021-06-166页
- 人教A高中数学必修三 输入语句输2021-06-166页
- 高中数学(人教版必修2)配套练习 第二2021-06-164页